三维激光扫描技术在轨道交通运营隧道收敛监测中的运用与精度分析
2020-12-28李新文徐教煌
李新文 徐教煌
(1. 宁波市轨道交通校测监护有限公司, 浙江 宁波 315010; 2. 中铁工程设计咨询集团有限公司, 北京 100020)
0 引言
城市轨道交通作为主要公共交通工具,线路大多数遍布城市主要区域,随着城市的不断发展,地铁附近越来越多的建筑物将会导致地铁隧道的变形,在地铁隧道变形的同时,其附近的建筑物也将受其影响产生形变,甚至发生大范围的沉降、倾斜或坍塌等,这将形成一种恶性循环,势必危机到地铁隧道及周边环境的安全性,如不对地铁隧道健康状况进行实时有效的检测,必将成为城市公共安全的隐患。随着轨道交通运营里程的不断增加,邻近运营隧道的新建工程数量不断增加,运营隧道的病害问题日益突出。城市轨道交通隧道结构受施工期质量缺陷、材料性能劣化、列车振动、周边工程活动、地质条件恶劣等多种内外因素的影响,区间隧道结构内部应力分布发生变化,容易导致不均匀位移,难以维持结构稳定与平衡,在运营期会出现结构病害,主要表现有:渗漏水、衬砌裂缝、衬砌掉块、接缝张开、管片错台、纵向沉降、横向收敛变形、竖向收敛变形等。这些病害如果不加以控制会影响隧道安全运营和使用寿命,甚至影响隧道结构安全,因此及时检测和发现隧道结构病害尤为重要。
三维激光扫描技术又被称为实景复制技术,几年来得到了飞跃的发展并在不同领域得到了广泛的应用[1-8]。本文主要分析了三维激光扫描技术在运营隧道病害检测中的应用及精度分析,并结合具体的工程实例验证了该方法在实际应用中的优越性及可靠性。
1 三维激光扫描距离测量精度分析
为了有效的测试及评定所用三维激光扫描仪的测量精度,保证后续研究数据的可靠性,本次研究将扫描仪与传统全站仪棱镜模式测量精度进行对比分析,估算出扫描仪的扫描精度,试验方法是将棱镜靶球固定不动,同时用扫描仪扫描靶球,用全站仪测量棱镜,最后用拟合出的扫描靶球球心与棱镜中心坐标对比,计算出扫描仪扫描精度。
球心拟合方法如下:设拟合后的球面的球心为(x0,y0,z0)及半径r。对于每一点拟合后估计的值与实际值的差值为式(1)
ei(x0,y0,z0,r)=(xi-x0)2+(yi-y0)2
+(zi-z0)2-r2
(1)
则误差的平方和为:
E是x0、y0、z0、r的函数。因此令E分别对x0,y0,z0的偏导数等于0,即可求出x0、y0、z0、r,有:
令
则有:
(2)
(3)
(4)
(5)
由(2)~(5)、(3)~(5)、(4)~(5)写成矩阵的形式为(6)。
(6)
求解该矩阵得到x0,y0,z0值,然后带入(5)式中得到r的值。
本次试验将全站仪和扫描仪同时架设在强制对中观测点,扫描棱镜靶球固定不动,利用全站仪测量出靶求棱镜至观测点的距离,再架上扫描仪对靶球进行扫描,计算出靶球至观测点的距离。通过重复测量试验了16次,全站仪采用有棱镜模式距离测量精度为0.6 mm+10-6D(D为平距)的徕卡TS30,测量成果如表1所示。
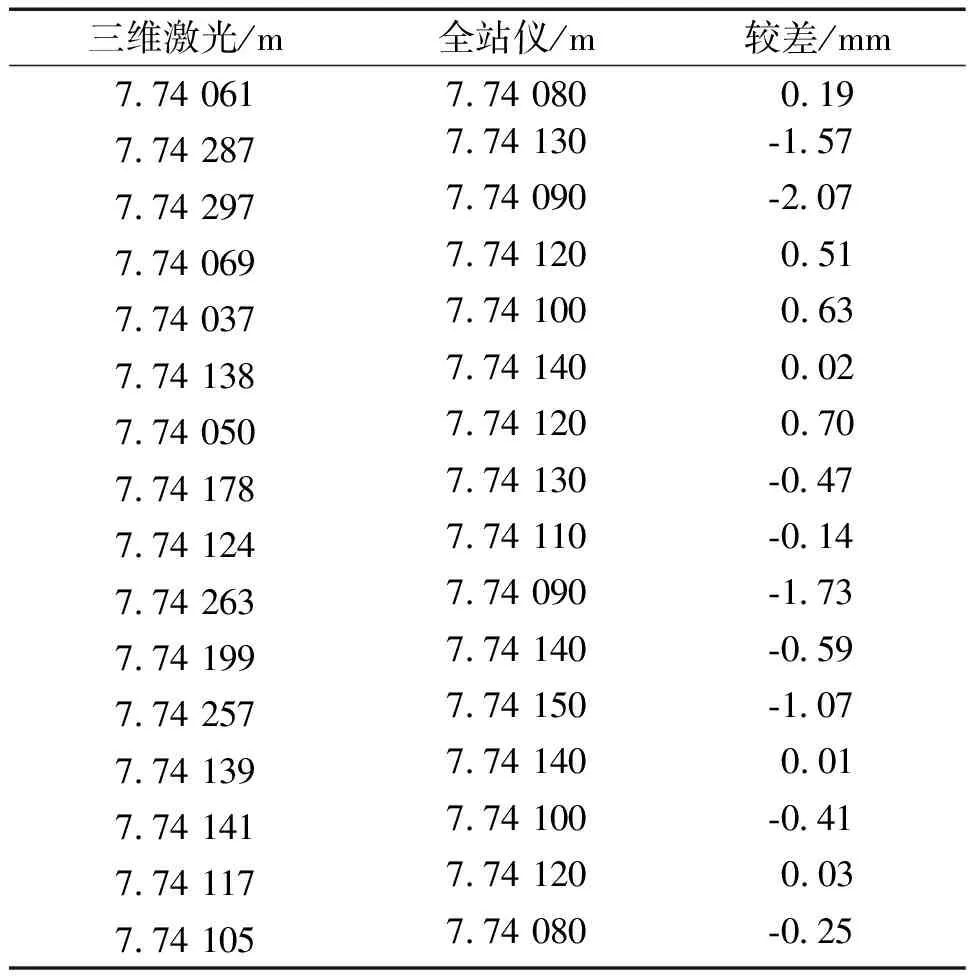
表1 距离测量成果对比表
由以上测量数据可知全站仪测量平均水平距离为7.741 2 m,根据中误差计算公式计算出相对于全站仪有棱镜测量法的距离测量中误差M=1.05 mm。
2 管片水平直径扫描精度分析
本次研究选取在同一位置进行多次扫描,将多次测量成果根据中误差计算公式推导管片水平直径测量中误差,中误差计算公式为:
(7)
由于地铁盾构隧道工作空间狭长,隧道内控制点较少,该项目采用全站仪配合三维激光扫描仪同时作业法,控制点采用隧道贯通测量完成后的导线点和高程点成果,在扫描仪两侧各伸出一个棱镜杆,每侧安置一个测绘用标准圆棱镜,两个棱镜与扫描仪中心的相对位置关系严格固定。距离扫描仪测5~10 m处设置一个直径100 mm的半球棱镜靶。全站仪的作用是给扫描仪基座上的两个棱镜及半球棱镜获取具有隧道控制测量坐标系的三维坐标。
本次对2组管片重新假设扫描仪多次扫描,管片1扫描了21次,管片2扫描了19次,测量数据如表2所示,两组测量数据计算出的测量中误差分别为1.3 mm和1.2 mm,可用于隧道收敛测量,测量成果如表2所示。
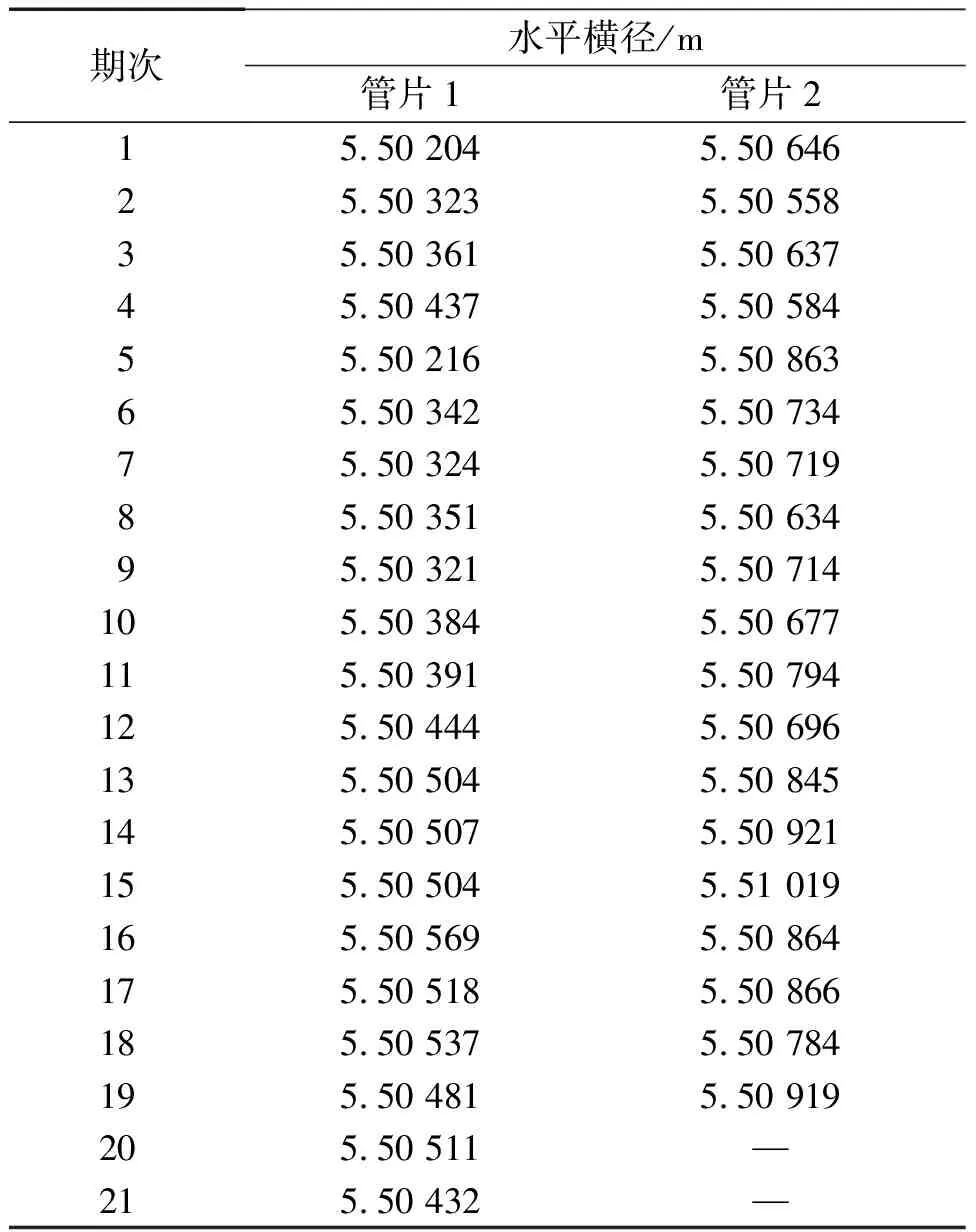
表2 两组管片扫描水平直径成果
3 点云密度研究与分析
一般来说隧道截面是标准的圆形,但是在施工中由于管片拼装误差及外界因素干扰刚成形的断面往往就已经不是圆形了。同时在隧道建成后,隧道在外荷载的影响下,还会产生一定量的不均匀变形,此时的截面就更不是标准的圆了,而更接近离心率比较小的椭圆,而且隧道顶端容易沉降,起拱线附近容易扩张,使得断面更易形成椭圆形状,将隧道断面拟合成椭圆形状有一定的合理性[9]。椭圆的一般方程为:
Ax2+Bxy+Cy2+Dx+Ey+1=0
(8)
本次研究通过椭圆拟合公式,对椭圆度成果与参与拟合计算的点云数量之间的关系研究,通过选取同一断面均匀选取不同数量的点数参与计算,计算成果如表3所示。
从表3可知当参与计算点云间距大于40 mm时,水平横径值、长轴值及短轴值均偏差相对较大,当点云间距为50 mm时,横径值差值达1.0 mm,因此,有效参与计算点云间距应小于40 mm,椭圆度拟合精度才能满足要求。

表3 椭圆成果计算成果表
4 工程实例
本工程为宁波地铁某已运营的出入段线盾构区间,此区段前期人工监测沉降及变形较为明显,此次试验共对该区间215环盾构管片进行2次扫描,2次扫描时间间隔为半年,选用的三维激光扫描仪型号为Amberg Profiler 5033C,该三维激光扫描仪可以自动化的记录被测物体位置、大小、形状等。能够在较短的时间内以极高的分辨率扫描被测物体,扫描视角320°×360°,扫描数据获取速率高达每秒1 016 000个点。鉴于运营隧道狭长的特点,本次试验三维激光扫描成果采用“绝对定位法[10]”。并在同时采用全站仪对管片收敛变化进行了传统监测。
根据两次扫描的成果对比分析,收敛变化成果统计如图2所示,本期三维激光扫描监测管径最大收敛为4.3 mm,且绝大部分横径值变大,占比为96.3%,说明第1至215环绝大部分上方压力增加导致横径值增大,三维激光扫描收敛监测、全站仪收敛监测及两种方法对比较差曲线图如图2(a)~(c)所示,由两种方法监测成果对比分析可知,管片变形趋势一致,较差均小于2 mm,说明三维激光扫描收敛监测精度满足要求。
最后对提取的隧道管片断面数据进行分析,利用专业椭圆度检测软件计算管环椭圆度,得到椭圆度计算结果如图3所示。
管片收敛曲线图如图4所示,可得到管片一周的收敛变化值,解决了传统方法的定点定线变化监测,防止管片局部变形而传统法式无法监测的弊端。
5 结束语
本文通过理论推算及现场试验验证三维激光扫描在隧道管片收敛监测的精度,并通过与传统方法的对比分析验证了三维激光扫描收敛监测的可靠性。
利用三维激光扫描进行收敛监测,可以克服传统方法点位采集量少、断面数量少、作业效率低等缺点,消除传统方法在收敛监测中的以偏概全的弊端,提高断面测量作业效率及精度,实现了管片变形的全方位检测。