基于Solidworks和Workbench下肢康复机器人结构设计与分析
2020-12-26蔡玉强赵闯朱佳欢
蔡玉强,赵闯,朱佳欢
(华北理工大学 机械工程学院,河北 唐山 063210)
0引言
据不完全统计,目前我国约有700万脑卒中风的患者,近年因脑卒中死亡的人数达到150万,在所有患者当中,近70%~80%的患者可能会留下残疾且需要接受康复性治疗[1]。我国迫切需要康复医疗的对象是老年人、残疾人(先天或后天)和慢性病3类群体。脑卒中风患者的康复是减小致残率的关键环节之一[2]。脑卒中的三级康复可以使患者逐渐恢复至日常活动能力(Activities of Daily Living,ADL),适用于现阶段并进行推广[3],而且进行康复治疗的时间越早,康复的效果也就越能达到正常人活动的水平[4],而且可以减少其它连锁并发症的发生几率[5]。
近年来,国内外多家公司与高校已经研发出了许多适用于人体下肢康复训练的机器人。现在对人体下肢康复训练机器人的研究仍然处于发展阶段,只有少数国家已经进入实际生产应用中,而我国的康复训练机器人尚未进行实质性的生产应用,还没有过多成熟性的产品,故需要进一步开展深入研究,同时进行人体下肢康复训练机器人的市场需求逐渐加大[6]。因此,研究具有独立自主知识产权的人体下肢康复训练机器人具有深远意义。
1 卧式下肢康复机器人结构设计
卧式人体下肢康复机器人最重要的设计部分是外骨骼机械腿,其最大的特点就是具有穿戴性,即要与人体腿部有物理接触。通过对人体下肢骨骼和肌肉的研究发现,下肢骨骼由大腿骨、小腿骨和足骨组成,通过髓关节、膝关节和跺关节3个部分串联组成,而双腿构件又由2个串联机构并联形成[7]。临床医学和人机工程学上通常用矢状面、冠状面和水平面3个矢状面来描述人体的运动。从生物学角度上来说,人体下肢的各个关节的运动方式不是绕球心运动,属于滑动和转动的复合形式运动,考虑到滑动量不大,所以将其当成是理想的球面副进行处理[8]。

图1 人体基准面
由于人体下肢关节间韧带长度限制等影响因素,髋、膝、踝3个关节在矢状面内的转角有较大的差异,如图1所示。在人体实际运动过程中,髋关节具有3个自由度,能实现外展/内收、伸展/弯曲、内旋/外旋运动;膝关节具有1个自由度,只能实现伸展/弯曲运动;踝关节具有3个自由度,能实现外展/内收、趾屈/背屈、和内旋/外旋运动[9]。基于人体坐姿和卧式人体下肢康复训练机器人的实际结合情况,实现人体下肢康复训练机器人的髋关节1个自由度:伸展/弯曲;膝关节1个自由度:伸展/弯曲;踝关节1个自由度:趾屈/背屈。各个关节的旋转角度范围,数据如表1所示。

表1 卧式人体下肢康复训练机器人关节运动角度
2卧式下肢康复机器人三维造型
卧式人体下肢康复机器人主要由智能轮椅支撑和下肢训练机械腿组成。下肢康复训练机器人具有多种实现方法,但是其主要作用是使患者下肢在机械的辅助作用下完成对人体步行状态下的运动,从而完成神经的功能重组再现,逐渐的恢复患者的运动能力。考虑到下肢康复机器人是一种特种医疗辅助型机器人,使用人群是有运动功能性障碍的患者,因此在可靠性、舒适性和安全性方面都有自身的要求。该项目设计研究的卧式人体下肢康复训练机器人整机结构如图2所示。
在卧式人体下肢康复机器人中,智能移动装置是非常重要的一部分,其功能与智能轮椅类似,它能够满足患者的需求运动到室内的任何地方甚至是户外,同时也是机械训练腿的支撑架。与外骨骼式康复机器人不同的是,卧式康复机器人不需要进行人体减重装置,考虑到患者的舒适度要求以及悬挂式康复机器人容易受外界干扰等情况,卧式康复机器人能更好地完成辅助患者进行康复训练的功能。此部分和智能轮椅等相关产品类似,不做详细赘述。

图2 卧式下肢康复机器人整体结构
康复训练机械腿按照人机工程学的要求要有足够的强度、硬度和轻量化,所以在材料的选择方面是一个关键的问题。比较各种材料的性能发现,康复训练机械腿的大小腿杆、长度调节杆和髋部固定端等一些连接构件均选择铝合金7050材料。镁合金具有质量轻巧、强度高、刚性小、切削性能好等特点,其最高抗拉强度可达455 MPa,铝合金在抗冲击能力和抗震减噪功能方面发挥着较好的作用[10]。但是镁合金吸收能量的能力约是铝合金的2倍,它能很好地弥补其余金属的缺点[11],由于考虑成本问题本设计使用铝合金材料。
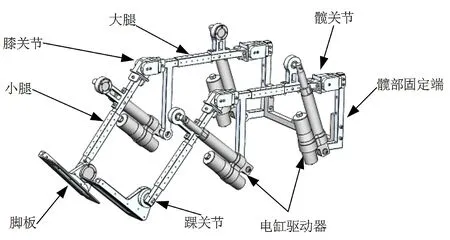
图3 卧式下肢康复机器训练机械腿
髋部固定端为一个直角中空的钢架,同时连接髋关节/大腿部分和驱动电缸,如图4所示。其中,一端与下肢康复机器人的大腿底部形成配合结构形成髋关节,通过内六角螺栓进行固定连接,且在髋关节处设置机械限位,限制机械腿的摆动角度,使其与人体坐姿腿部摆动的运动角度规律相符合,坐姿状态下设置为43°,即前摆39°,向后摆4°;另一端与驱动电缸形成轴系连接,使驱动电缸能够降低至最小摩擦进行转动,保证驱动电缸能够完成需要的摆动角度。
机械腿大腿部分结构如图5所示,腿部支架为中空结构,大腿部分上端与髋关节通过内六角螺栓连接,大腿支架由腿部连杆和长度调节杆组成,构成能够进行长度调节的机构,以满足于不同人群的身高体重的康复训练要求。机械大腿通过长度调节杆上的孔来调节长度,将机械大腿孔与大腿杆上的孔同心,使用插栓固定,长度调节杆杆上的孔底部带有磁性,防止插栓松动,机械大腿的可调范围是315~425 mm。
人体腿部与机械训练腿通过绑带固定,按人机工程学要求需要做到人体舒适。在膝关节处设置机械限位,限制机械腿的摆动角度,使其与人体坐姿腿部摆动的运动角度规律相符合,坐姿状态下设置为105°,即前摆30°,向后摆75°;机械腿下部分与小腿部分通过转动心轴结构构成膝关节。

图4 髋部固定端 图5 机械大腿
机械小腿部分与大腿部分相类似,其可调节范围为295~415 mm,如图6所示。其中,小腿部分的最下端,设计脚板固定支架构成踝关节,与脚板进行心轴轴系结构,内部通过弹簧构成从动连接,人体脚部与脚板使用绑带连接,使脚板部位与机械小腿成固定角度,且保证舒适。
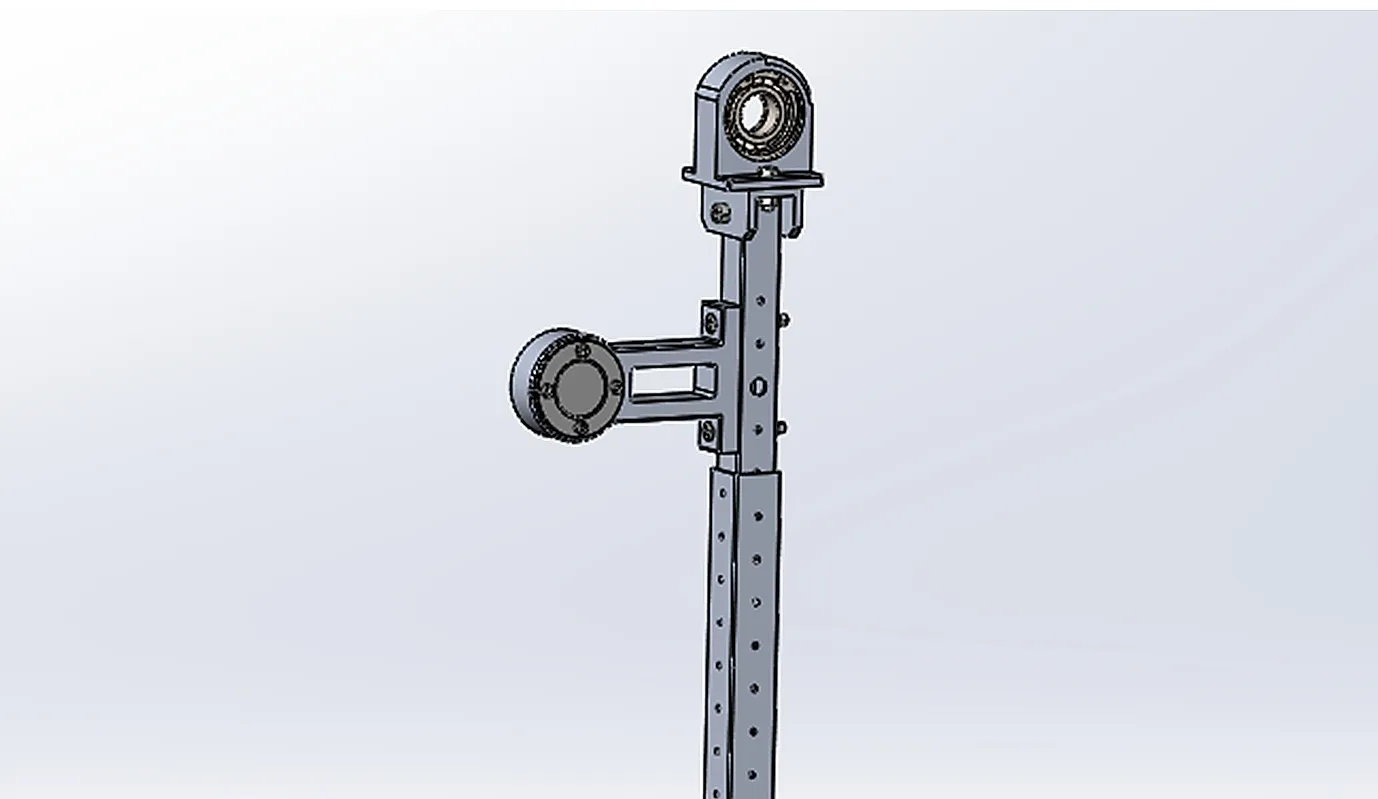
图6 机械小腿
踝关节设置极限机械限位,能够防止意外情况下造成脚部的伤害,设置为40°,即前摆25°,向后摆15°,如图7和图8所示。

图7 踝关节 图8 脚板
驱动部分为电缸,经过人体转矩和驱动力矩分析,最终选型为美国汤姆森Thomson公司生产的型号为MX24-B8M10E1电缸。大腿和小腿驱动因设计要求,确定为直线执行器(电缸), Max Jac 24 V直流电压, 承载能力800 N,行程100 mm,编码器Cable length 300 mm,Connector 30 mm/s移动速度。
3 Workbench卧式下肢康复机器人机械腿有限元分析
卧式人体下肢康复机器人,在机械腿部分,需要辅助人体腿部按照正常人体运动规律进行运动,提供一定的腿部重量支撑,从安全角度分析,需要对康复训练机械腿部结构进行强度校核分析,是否能够满足实际性要求。ANSYS Workbench[12]软件是在CAE领域当中应用比较广泛的有限元分析软件之一,具有所有主流CAD软件接口,能实现所有数据的传递。利用Solidworks建立好三维模型,通过Solidworks与Workbench的连接,导入到Workbench软件当中进行静力学分析[13],校核康复机器人机械腿结构强度。
3.1 卧式下肢康复机器人机械腿关键部分
卧式下肢康复训练机器人机械腿在进行康复工作时,考虑到机构受力主要来自以下2个方面,第一是机械腿自身重力与康复人体腿部部分重力,第二是髋关节和膝关节处的转动力矩影响。综合所有影响分析可知,大腿杆、大腿伸缩杆和小腿杆、小腿伸缩杆为机械腿部关键部分,结构轻薄且受力较为复杂。如图9所示,为完整右腿部机械腿结构。

图9 机械腿关键部位-右腿
就机械腿本身的重量而言,越是处于末端位置的部件,承受的重量越大,特别是在机械腿的小腿部分和踝关节轴部分,除自身重量之外,在大腿杆和小腿杆处分别存在最大为67 Nm和40 Nm的力矩作用[14]。进行受力分析时,因要求适用于不同的人体,考虑极限条件的发生,对大腿杆、小腿杆和伸缩杆施加1 000 N的重力载荷以及最大力矩。以卧式人体下肢康复机器人机械腿部-右腿,进行示例分析。
3.2 Workbench的有限元强度分析
将驱动装置简化,直接分析下肢机械腿部关键部件。在Solidworks当中建立好三维模型,通过Solidworks与Workbench的无缝连接,导入到Workbench软件当中进行静力学分析。提前定义好模型的材料属性,将模型重要部件设置为Aluminum Alloy,其他部件及紧固件设置为Structural Steel;然后进入到Workbench当中的Modal模块进行网格划分,划分网格使用四面体单元,选择精度为适中,单元尺寸设置为10 mm,将下肢康复机器人机械腿有限元模型划分为520 687个节点,286 770个单元,网格Average大于70%,网格可用,如图10所示。
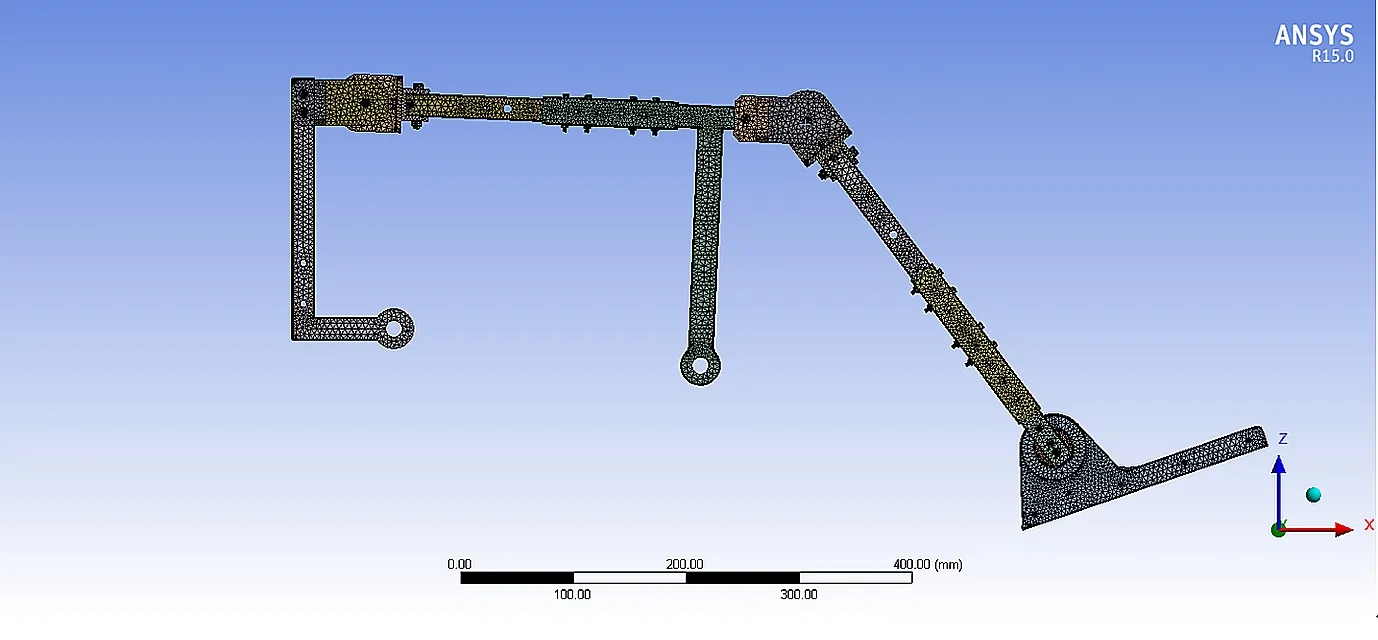
图10 机械腿有限元网格划分模型
其中,髋关节处设置为固定约束,同时附加1 000 N重力极限载荷,设置逆时针转矩67 Nm;膝关节处附加重力极限载荷1 000 N,设置逆时针转矩40 Nm。前处理完成后对有限元模型进行后处理,后处理添加Equivalent(von-Mises)和Total,分别求解出如图11和图12所示的有限元应力和位移变形结果。

图11 机械腿应力分布总图

图12 机械腿应力分布细节图
从图12可以看出,大腿杆极限应力发生在与膝关节连接处,应力为120.7 Mpa,该处结构、受力较复杂,符合实际情况。小腿杆极限应力同样发生在与膝关节连接处,应力为53.6 MPa,踝关节处的转动轴应力为67.1 MPa,与之前理论分析相一致。
各腿杆因要减轻质量,以减小驱动负载,设置其材料为7050铝合金,其屈服强度σs=455 MPa;踝关节处转动轴需要承载脚板转动,受力较复杂,转动轴的材料为45钢,其屈服强度σs=355 MPa。考虑到机械腿实际工作条件,取值动载荷系数Kv=1.8,取材料许用安全系数[Sσ]=1.5,进行强度计算校核。
针对大腿杆:
(1)
针对小腿杆:
(2)
针对踝关节转轴:
(3)
由公式(1)~(3)可以推导出,大腿杆、小腿杆和踝关节轴部所受极限应力σ均小于各材料的许用应力[σ],满足试验模拟要求。但是,本强度校核分析是在理想状态下,与实际康复机器人训练情况有一定差距,可能导致材料强度不能满足实际需求,因此要针对康复机器人机械腿关键部位进行必要的强化处理。整观康复机器人机械腿云图,机械腿的总体应力普遍较小,尤其是远离各关节处,可以使用Workbench自身功能,进行优化拓补设计,改进轻量化,减轻卧式康复机器人整体驱动负载。
4结论
(1)建立一种卧式人体下肢康复机器人全新的设计方案,分为智能移动装置和康复训练机械腿两部分。对机械腿的髋、膝和踝等部位进行结构设计,结合人机工程学,调整各部位至人体最佳舒适度,利用Solidworks完成卧式人体下肢康复机器人模型的总装配。
(2)根据人体运动规律、人体关节转矩和驱动力矩,对驱动装置进行选型,最终确定为Thomson公司生产的型号为MX24-B8M10E1电缸,能够满足康复机械腿和人体的控制驱动。
(3)基于Workbench对卧式人体下肢康复机器人机械腿进行结构强度校核分析,得到设计所选用的材料及结构能满足一般人体的康复训练需求的强度,但依据实际情况,还需要进行强化处理。
