一种老人用下肢运动训练装置控制系统设计
2020-12-25顾绮芳
顾绮芳
(无锡城市职业技术学院,江苏无锡,214000)
0 引言
在传统康复训练疗法中,物理疗法是应用非常广泛的一种方法。康复训练师或其他人手动帮助患者肢体进行康复训练,这种方法能一定程度上带动患者肌肉进行活动,从而有效防止患者肌肉长期缺少收缩运动带来的肌肉萎缩。这种传统方法需要第三者帮助,会带来大量的人力资源消耗。目前许多研究机构或厂商开始瞄准这个研究领域,需要设计一种结构简单、性能可靠、售价较低、能为许多社区康复机构和家庭所接受的康复训练装置,它能有效地帮助患者进行日常康复训练,并节约大量人力物力。
1 课题背景
目前在康复医疗领域,康复机器人已经成为机器人研究领域的新热点。康复机器人开始逐渐进入人类的生活中,它为传统康复理论的发展带来机遇:这些传统疗法能对患者的肌肉萎缩及相关症状起到一定缓解作用,能对患者起到一定的康复作用,但是需要大量的康复训练师,目前国内康复训练师不足,急需康复机器人代替人工,满足患者的需求。
在国外,德国柏林自由大学(FREE UNIVERSITY BERLIN)开展了腿部康复机器人的研究,并研制了MGT型康复机器人样机。美国的RUTGERS 大学开展了脚部康复机器人的研究,并研制了RUTGER 踝部康复训练机器人样机。瑞士苏黎士联邦工业大学(ETH)在腿部康复机构、走步状态分析方面也取得了一些成果,早在汉诺威2001年世界工业展览会上就展出了名为LOKOMAT 的康复机器人模型。
我国对康复机器人的研究起步比较晚,辅助型康复机器人的研究成果相对较多,康复训练机器人方面的研究成果则比较少。清华大学在国内率先研制了卧式下肢康复训练机器人样机,在这项成果中他们采用了虚拟现实技术。
我国简易型康复训练器械的产品较多,如宝达华系列康复训练器械,它采用自行车式原理,与普通体育训练器材的工作原理相同。其中有一种康复训练器械产品,它通过配重的方法对患者的各关节施加一定的运动力和运动阻力,对患者的肢体进行康复运动训练;还有一种手臂训练器械,它可以对患者手臂施加一定的运动阻尼。
2 下肢运动训练装置结构设计
如图1 所示,本设计装置共由9 个部分组成,它们分别是:主控微机(PC)、直流伺服电机、电机控制器、电机驱动器、同步带传动单元、直线导轨、固定装置及支架、压力传感器、调节装置等。
其运动单元由驱动轮、被动轮、张紧轮、同步带,支撑装置等组成,通过两组同步带进行传动;具有稳定性好、负载较高、低噪音、低重量、体积小等优点。
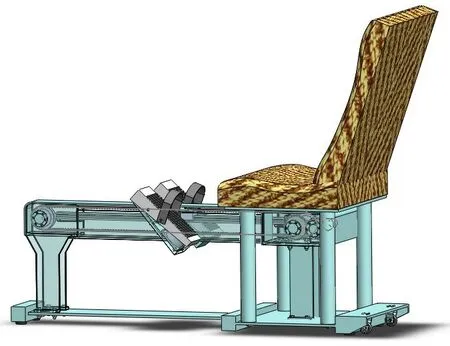
图1 总体结构图
3 控制系统
3.1 控制系统流程
下肢康复装置的控制部分不属于这次设计的主要部分,这里只做简要的说明。
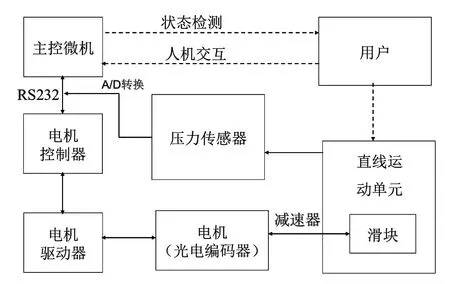
图2 控制流程图
用户通过人机交互界面与主控微机(PC)进行数据交互;主控微机通过RS232 通信串口与控制器进行双向通信,控制器通过驱动器控制带有光电编码器的电机;电机通过减速器与直线运动单元的滑块相连接,同时用户将力作用在直线运动单元的滑块上。以上构成主控回路。
另外,通过压力传感器检测作用在滑块上的力的大小,使控制电流与人的推动力大小相适应,从而实现该装置的自动运行。压力传感器输出的是电压信号,通过A/D转换后同样由串口反馈至主控微机,进行一系列运算后向控制器输出相应电流值。这一部分构成反馈回路。
3.2 控制方式
本设备主要应用了电流控制和位置控制两种控制方式。目的意义在于:目前的康复设备主要应用于残疾人或者被动训练。本设计的康复设备主要应用于老年人,同时要实现主动训练,因此主要采用电流控制。
3.2.1 位置控制
位置控制主要基于安全性的考虑,应用位置控制设定移动距离,进行位置限制,防止超程。滑块运行到直线单元两端会自动停止,并且应用Sleep 函数停止2s 才能继续运行。
3.2.2 电流控制
电流控制的原理是:电机始终驱动滑块朝着人的方向运动(即弯曲腿或者胳膊的方向),一旦用力推动滑块向背离人的方向运动,电机的实际运动方向和控制方向是相反的,这时就会产生翻转电流,并且电流越大电机的驱动力越大。因为电机反转,外在表现为推动力越大,阻力越大,就很难把滑块推回去,也就无法实现主动训练,这就需要电流控制。电流控制就是让电机在恒定的电流下运行。
内部实现机制:在控制器的每个控制周期50us 中,检测8 次电流。一旦检测到实际电流与控制电流不一致,控制器就会向驱动器发一个I/O 信号,控制驱动器的FET(场效应管 )。简单地说,就是通过反向电压的大小控制耗尽层厚度的变化,达到控制电流的目的,从而使电机的阻力恒定。
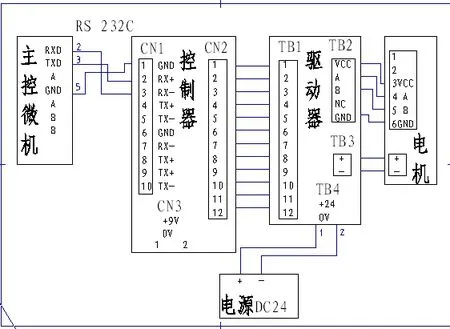
图3 控制器连接示意图
控制器和主控微机、驱动器共同构成该机构的伺服控制系统。该控制系统的最大特点是位置、速度、电流三种控制方式可随时变更。主控微机通过九针串口按照RS232C 通信协议与控制器进行通信。
九针串口只用了三根线,其中2 号引脚接收端RX 连到控制器的发送端TX,3 号引脚发送端连到控制器的接收端RX,另外,地线相连,实现双向通信。
控制器接收到来自主控微机的指令后,经过一系列运算,将计算结果以PWM 的信号形式输出到电机驱动器。同时电机的位置、速度和电流能实时测量并送到主控微机。驱动器起信号放大、消除干扰和检测电流等作用。控制器和驱动器均采用24V 供电。
4 结论
康复训练对于下肢瘫痪的病人和老年人有非常重要的意义。传统康复手段利用各种物理或作业疗法等对截瘫患者进行康复训练,这些方法中患者都是“被动”地接收外部治疗,而不能反映出患者“主动意愿”。康复机器人将机器人技术与康复训练相结合,为患者提供自动化、智能化的康复训练手段。
利用康复机器人对患者进行康复训练治疗可以结合机器人的特点,患者在缺少康复训练师的情况下也能自主进行康复训练。同时,根据本文的康复机器人系统,引入生物信息反馈(表面肌电信号)以及运动信息反馈,康复机器人控制系统利用相关算法可以实现多种康复训练方法,包括被动训练、主动训练以及两者相结合的半主动康复训练。
在被动训练中,康复机器人控制系统根据机器人与人体肢体结合在一起的动力学特征,能控制机器人机构带动患者进行相关训练动作。
在主动训练时,康复机器人利用反馈信息,控制施加于人体上的多通道多肌群功能性电刺激强度,从而实现特定康复训练动作。
这种综合了多项新技术的康复训练方法,如功能性电刺激等,已经成为相关领域的研究热点之一。
目前康复机器人技术有了较大的发展,但在实用能力上还需要进一步完善和提高。康复机器人技术应该主要向以下几个方向发展。
1)智能化。康复机器人除了具有基本的自主移动、拿取和运送物品等功能外,还应进一步提高智能水平,简化用户的控制。这需要发展和综合应用各种智能控制技术,使康复机器人能更有效地将用户和社会生活环境融合起来。
2)人性化。康复机器人是为残疾人和老年人设计的,更应根据他们的生理和心理特点,考虑到他们的特殊需要,设计出称心如意的产品。
3)模块化。要实现康复机器人的批量生产、技术兼容性和简易快捷的更新能力,必须实现模块化。机器人的硬件部分如机器臂、控制器、传感系统和人机接口等都按统一的标准模块化设计,形成各自的嵌入式系统,能方便地集成和统一控制。
随着康复机器人技术的研究和发展,这种产品必然会真正走入残疾人和老年人的生活,为他们提供丰富的帮助与服务,改善他们的生活质量。