S模式监视数据质量分析系统设计与实现
2020-12-24陈恺


摘 要: 为了提升S模式监视数据在空管自动化系统的利用效率和运行稳定性,提出一种基于αβγ的航迹滤波算法和相关S模式监视数据处理与解析的算法模型。主要研究报文关键数据项的解析,利用算法模型进行监视数据质量评估和航迹平面投影。依据所研究的算法,设计了一款S模式监视数据质量分析系统,该系统支持多路监视源信道的接入,能实时分析数据质量,统计相关误码率,具备真实反映目标航迹运动态势等功能。实验结果表明:该系统工程实现较为简洁,具有良好的稳定性和魯棒性,能协助技术维护人员及时发现S模式监视数据源的异常情况,为推动S模式监视数据广泛应用提供了一种可行、有效的监测方式,在空管单位或地方塔台具有一定的应用价值。
关键词: 自动化系统;S模式监视数据源;质量分析;航迹解析;功能实现
中图分类号: TP391.9 文献标识码: A DOI:10.3969/j.issn.1003-6970.2020.07.047
本文著录格式:陈恺. S模式监视数据质量分析系统设计与实现[J]. 软件,2020,41(07):228-234
Design and Implementation of Quality Analysis System for Mode S Monitoring Data
CHEN Kai
(Guangxi Sub-bureau of Central South Air Traffic Management Bureau of CAAC, Nanning, Guangxi 530000, China)
【Abstract】: In order to improve the utilization efficiency and operational stability of Mode S monitoring data in air traffic control automation system, an algorithm model based on alpha-bet-gama trace filtering algorithm and related Mode S monitoring data processing and analysis is proposed. The analysis of key data items in the message is studied, and the algorithm model is adopted to monitor the quality of data and the flight plane projection. According to the algorithm studied, an air traffic control Mode S monitoring data quality analysis system is designed, which supports the access of multiple monitoring source channels, can analyze the data quality in real time, statistics related error rate, and has the functions of truly reflecting the movement of the target trail. The experimental results show that: The engineering of this system is more concise, has good stability and robustness, can assist technical maintenance personnel to find the abnormality of Mode S monitoring data source in time, as well as provides a feasible and effective monitoring method for promoting the wide application of Mode S monitoring data, suggesting a certain application value in air traffic control units or local towers.
【Key words】: ATC; Mode S; Quality analysis; Track analysis; Function realization
0 引言
中国民航S模式应用是当前民航领域研究热点,基于S模式的监视源设备主要包括S模式雷达、多点定位系统以及ADS-B地面站等设备,S模式技术在空管中的应用将对航空器安全运行将提供更为有力的支持手段。主要可以解决以下问题:(1)航空器识别问题:S模式应答机具备24位地址编码可有效解决目前A/C雷达识别错误、自动化系统相关错误等问题;(2)雷达信号质量问题:S模式应用可以大大提高信号的干扰和串扰的解码能力,减少雷达假目标的产生,高度信息和编码信息的识别更准确[1]。(3)飞行意图监控问题:S模式可以监控航空器的水平意图,如航向、空速等意图信息[2];(4)地空情景意识问题:航空器的姿态信息、QNH设定、TCASRA信息等可以通过S模式数据链下送出来,可以提供给管制员进行提示及参考,共享空地情景意识。
鉴于S模式监视数据的优越性,目前国内空管自动化系统普遍引接S模式监视数据进行航迹融合,在实现航空器高精度下行数据链(DAPS)传输的同时,也带来S模式监视数据源信号质量监测的困难。任意一路S模式监视源的异常数据输出均会导致自动化系统出现融合航迹目标分裂、位置和高度跳变,以及产生假目标,这些异常情况会严重影响现场管制对航空器的实时指挥。
因此,如何准确有效地分析和评估S模式监视数据质量和数据源信道传输质量成为当前民航系统比较重要的课题,特别适用于S模式监视源传输时所要求的高速率、时效性。基于上述原因,一套能对监视信号进行实时分析、评估与显示,使用户最终得到一个能够客观反映监视信号质量分析结果的软件系统对于提升空管设备保障力度和飞行安全裕度极为重要。
1 系统实现方法与整体结构
本设计基于JAVA和Swing技术,采用C/S开发框架和模块化的程序设计思想,将系统划分为以下几个主要部分:(1)数据接收模块;(2)监视数据校验参数设置模块;(3)监视数据格式解析与处理模块;(4)监视数据质量分析模块;(5)实时告警模块;(6)航迹目标态势显示模块;(7)记录与回放模块。系统结构框图如图1所示。
2 系统关键算法研究与设计
2.1 航迹滤波算法
alpha-bet-gama滤波(αβγ滤波)是一种可用于状态估计、数据平滑的滤波器,在位置x、速度v的基础上引入加速度a[3],特别适用于航空器飞行的剖面模型。αβγ滤波的形式和kalman滤波相近,但是其最突出的优点是它不依赖系统的具体模型,在工程实现上适用于单路监视源的航迹跟踪处理。 其模型如下:
2.2 監视数据解析算法
通常一个监视数据报文可以包含一个或多个航迹目标的数据块,各个数据块可以属于不同的种类。一个数据块由数据种类(CAT)、数据长度(LEN)以及若干个记录所组成。每一个记录由可变字长(FSPEC)和航迹数据项所组成,其数据帧结构如图3所示[6]。
本设计需要解析不同种类和不同状态的监视数据报文,可根据CAT和FSPEC为标志位进行监视数据解析,具体流程如下:
(1)根据CAT定义该数据报文为航迹目标数据报文还是服务质量报文(如CAT=048为S模式雷达数据报文;CAT=034为S模式雷达服务报文等);
(2)目标可能出现的所有FSPEC标志位定义,并在接收初始单路监视航迹数据帧时采用冒泡排序法按从小到大对FSPEC标志位出现位置进行排序,并依次存入排序数组Array,记录初始航迹数据帧的长度Length;
(3)在解码子函数中对不同FSPEC标志位的目标进行数据解析,获取目标的航迹信息;
(4)然后将Array[0]所存储的标志位与FSPEC字符标志位进行比对,进入对应的目标解析函数队列,并以本次FSPEC字符出现位置前的固定初始位置进行目标数据解码;
(5)本次目标数据解析完毕后,将已解析的目标数据包丢弃,按下一个FSPEC字符出现位置前的固定初始位置截取余下数据包,组成新的航迹数据帧长度Length;
(6)重复(1)至(5)步骤,直至数据帧长度Length小于vsp设定值。
2.3 监视数据质量对比算法
系统需要评估监视数据的质量主要包含以下内容:
(1)雷达信号帧格式的有效性,包括帧长度、CRC 校验等,判断其是否出现错误;
(2)雷达正北信息和扇区信息的有效性、连续性及时效性;
(3)目标航迹超过作用距离的位置跳变、SSR 跳变、高度跳变、航向跳变、假目标等。
2.3.1 扇区丢失计算
雷达服务报文主要包含正北和扇区信息,系统首先分析I002/000字段,若字段数值为001,则为正北报;为002,则为扇区报。一般一个雷达周期可分为16扇或32扇,为了便于说明,假设雷达扇区等于32,因此,从0度开始编号,每个扇区为11.25度,雷达在正常转速下每转到11.25度就会发送一份扇区报文,I002/020字段为发送该份扇区报所属扇区号,I002/030字段为该路雷达发送报文的时间戳。因此,判断扇区连续性的关键要素是扇区号和报文的发送时间是否保持连续性。
2.4 监视数据目标显示算法设计
监视数据目标显示处理包括已存在航迹目标的更新和新航迹目标的生成。如果系统判定出最新接收到的目标信息与上个周期系统中某个航迹目标指的是同一航空器,则认为此次收到的目标信息为此航迹目标的更新信息,系统将刷新此目标的状态描述,更新MMI界面的目标信息,否则系统将根据此次目标信息建立一个新的航迹目标[8]。
航迹目标WGS-84坐标系需要经过高斯投影[9]转成平面坐标系,其部分核心代码如下所示。在进行系统处理中心为原点的直角坐标系投影时,可将航迹MMI显示等效为一个画布,画布最小显示元素定义为航迹目标可移动的最小单位,为了保证航迹位置经过滤波平滑处理后在MMI界面显示的连续性,需要将处理后的平面投影航迹位置数据类型定义成double型。当监视数据解析模块处理相同航迹号(TrackID)时,系统首先进行航迹位置空间窗和航迹信息(SSR、速度等)相似度确认,确认无误后,进而修正同一目标的航迹信息。利用JAVA编程语言的HashMap表[10]存储最新航迹数据信息,后台线程每2秒自动刷新航迹表,使用drawOval()和drawString()函数进行目标航迹MMI界面绘制,并调用repaint()模块进行航迹画布重绘,实现航迹目标的动态显示。
public Point LatAndLonToXY(Lon L0, Lat Latitude, Lon Longitude)
{
double oriPoint_L =GeoPoint(L0.Degree,L0.Minute, L0.Second);
double e = Math.sqrt(1-Math.pow(small_b/small_a, 2));
double e1 = Math.sqrt(Math.pow(small_a/small_b, 2)-1);
double M = GetM(e,curfixPoint_B);
double N = small_a/Math.sqrt(1-Math.pow(e,2)*
Math.pow(Math.sin(curfixPoint_B),2));
double x = FN+k0*(M+ N*Math.tan(curfixPoint_B)*(Math.pow(Big_A,2)/2 + (5-T+9*C+4*Math. pow(C,2))*
Math.pow(Big_A,4)/24) + (61-58*T+Math.pow(T,2)+ 600*C-330*Math.pow(e1,2))*Math.pow(Big_A,6)/720);
double y = FE+k0*N*(Big_A+(1-T+C)*Math. pow(Big_A,3)/6+ (5-18*T+Math.pow(T,2)+72*C-58* Math.pow(e1,2))*Math.pow(Big_A,5)/120)
Point p = new Point((int)y,(int)x);
return p;
}
3 實验结果与分析
按照上述设计方案和算法原理研制了基于JAVA的空管S模式监视数据质量分析系统,该系统可分析当前主流雷达格式(含S模式)数据和ADS-B数据。图6是监视数据分析系统主界面,该系统通过接收外部监视数据转换器(如MPCS802雷达同步串口转换器)的UDP网络数据,可最多同时支持16信道监视数据实时分析,分析结果通过统计方式呈现给用户。其主要功能为:
(1)当系统正常接收外部UDP监视数据时,接收模块不断刷新接收界面;
(2)监视数据出错统计表实时统计某路监视数据质量分析项:包含信号中断情况、延时情况、格式错误、CRC 错误、正北/扇区丢包情况、目标数量、最远覆盖距离、二次代码/高度的有效性/交织率、目标连续更新率等;
(3)航迹信息选择表则显示被选择监视源的目标数据解析情况,包含航迹目标的航迹号、坐标、速度、航向角等,使用户直观掌握目标航迹关键信息的解析情况;
(4)提供包含信号中断、CRC、帧长度错误、格式错误等异常告警;具备正北报文、扇区跨越报文丢失统计功能,并用来参考估计链路丢包情况;具备 SAC/SIC、二次代码、高度、位置等重要数据的跳变监控功能;
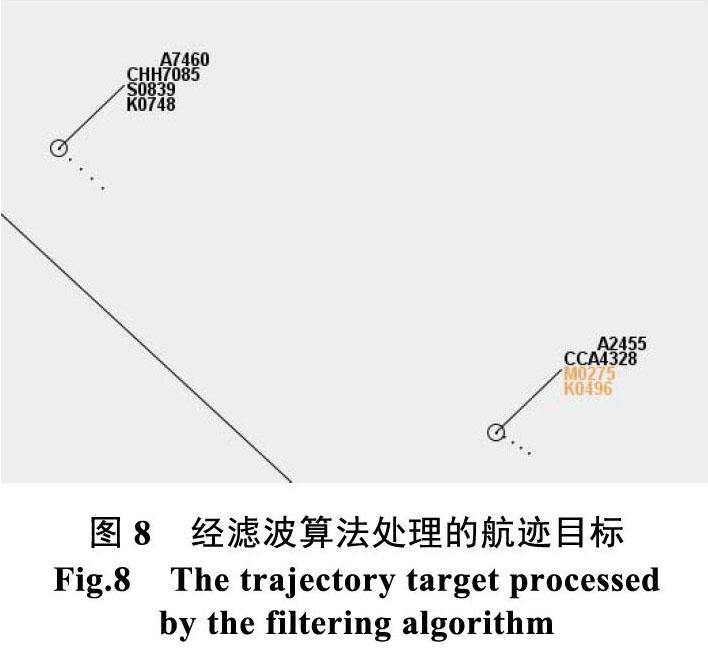
图8和图9分别为采用本文所提出滤波算法和未采用滤波算法的航迹对比图。从图8可知,目标航迹的历史点迹平滑,速度矢量线摆动较小,未出现明显的航迹断续现象;图9中航迹出现断续,历史点迹之间的间隔大小不相同,并出现明显的航迹矢量线摆动。
4 结语
本文研究了监视数据处理方法,给出了详细的计算模型和设计思路,依据所研究的算法,设计了基于JAVA的S模式监视数据质量分析系统。该系统具有较好的系统稳定性和鲁棒性,现已在民航广西空管分局投产使用,用户体验良好,能有效协助技术维护人员实时分析已接入自动化系统的S模式监视数据源质量情况,及时发现监视信号源的异常情况。后期将继续研究如何监测S模式监视数据增强型DAPS下行数据,如机组选择高度、QNH设定、TCASRA等信息的完整性和正确性,并结合实际应用,进一步完善系统的附加功能。
参考文献
<!--[if !supportLists]-->[1] <!--[endif]-->都佰胜, 王旭辉. 航管S模式雷达中的导前检测技术[J]. 民航学报, 2018, 2(03): 37-40.
<!--[if !supportLists]-->[2] <!--[endif]-->万世昌. 基于HDFS跟踪的雷达控制系统鲁棒性增强技术[J]. 计算机测量与控制, 2019, 27(12): 75-78.
<!--[if !supportLists]-->[3] <!--[endif]-->李志国, 李旭明, 王运锋.
一种改进的扩展卡尔曼滤波[J].
现代电子技术, 2016, 39(02): 9-11.
<!--[if !supportLists]-->[4] <!--[endif]-->李毅, 李珊珊. 应用勒贝格积分和卡尔曼滤波的移动目标检测跟踪算法[J]. 现代电子技术, 2018, 41(23): 62-66+71.
<!--[if !supportLists]-->[5] <!--[endif]-->许文君. 空管自动化系统及数据融合方法研究[D]. 南京邮电大学, 2019.
<!--[if !supportLists]-->[6] <!--[endif]-->朱海波, 张军峰, 刘杰, 等. 民用航空器四维航迹预测技术综述[J]. 航空计算技术, 2017, 47(02): 54-58.
<!--[if !supportLists]-->[7] <!--[endif]-->华炜. 浅析标准雷达数据格式ASTERIX[J]. 民航科技, 2001, 2: 14-18.
<!--[if !supportLists]-->[8] <!--[endif]-->李璐. 某型空管二次雷達显示软件设计与实现[D]. 电子科技大学, 2017.
<!--[if !supportLists]-->[9] <!--[endif]-->C.F.高斯. 算术探究英文版[M]. 北京: 世界图书出版公司, 2016: 135-143.
<!--[if !supportLists]-->[10] <!--[endif]-->李刚. 疯狂Java讲义[M]. 5版. 北京: 电子工业出版社, 2019: 93-94.
<!--[if gte vml 1]>![]() <!--[endif]-->
<!--[endif]-->
