基于Arduino开发板的自动循迹避障智能车控制系统设计
2020-12-24闫博扬李玉衡姚磊
闫博扬 李玉衡 姚磊


摘 要: 本文设计了一种基于arduino开发板的自动循迹避障智能车系统,通过红外模块以及PID控制算法进行循迹,利用超声波模块进行避障算法处理,利用智能摄像头进行颜色形状识别,完成有色小球动态追踪任务。并通过搭建测试赛道,并对系统基本性能进行了实际测试。结果表明,该系统满足自动控制系统稳定性,快速性,准确性的特点,具有良好的稳态特性及动态响应,可以应用于人工智能领域,具有理论研究意义和实际应用价值。
关键词:循迹避障;智能自控车;PID算法;图像识别
中图分类号: TP273.4 文献标识码: A DOI:10.3969/j.issn.1003-6970.2020.07.011
本文著录格式:闫博扬,李玉衡,姚磊. 基于Arduino开发板的自动循迹避障智能车控制系统设计[J]. 软件,2020,41(07):57-60
Design of Automatic Tracking Obstacle
Avoidance Antelligent Vehicle
Control System Based on Arduino Development Board
YAN Bo-yang, LI Yu-heng, YAO Lei
(School of Mechanical Engineering, Shanghai University of Technology, Shanghai 200093)
【Abstract】: In this paper,an automatic tracking obstacle avoidance intelligent vehicle system based on arduino development board is designed,which using infrared module and PID control algorithm to track, using ultrasonic module to deal with obstacle avoidance algorithm, using intelligent camera to identify color shape, to complete the dynamic tracking of colored ball. The basic performance of the system is measured by building a test track. The results show that the system meets the characteristics of stability, rapidity and accuracy of automatic control system, and has good steady-state characteristics and dynamic response, which can be applied in the field of artificial intelligence, and has theoretical research significance and practical application value.
【Key words】: Tracking obstacles; Intelligent automatic control vehicle; PID algorithm; Image recognition
0 引言
在高度現代化的今天,AI及自动化技术广泛应用,却还有许多小工厂、物流中心,在用人力搬运货物。耗费了大量的人力物力在搬运货物这种简单机械的工作,现有的运货机器人有造价高、维护难等问题。故想开发一款低成本,易维护的可循迹避障的货运智能自控车系统。该自控智能车具有循迹黑线,超声避障,以及利用摄像头追踪捕获彩色物块功能,可应用于人工智能领域里,参与智能运输[1]。
1 系统硬件环境
1.1 运行测试赛道
如图1为基于arduino开发板的自动循迹避障智能车系统测试赛道。赛道分为从三部分,第一部分为循迹部分,最左端虚线为出发点,智能小车从虚线端出发,首先进入循迹段,利用红外传感器进行PID算法循迹;第二部分为避障路段,该路段有五个相同的合适挡板作为障碍物,智能小车利用超声波模块进行避障前进;第三部分为彩色小球追踪识别路段,智能小车利用openmv摄像头进行颜色形状识别,运动到小球附近一定距离范围内后停止运行,整个赛道测试完成[2-5]。
1.2 智能车整体结构
板球平衡控制系统的框架如图2所示,由电源模块,主控模块,摄像头模块,红外模块以及超声波模块构成,利用主控器件和各传感器得到的处理信息对电机控制,完成路段功能测试。
2 系统软件环境
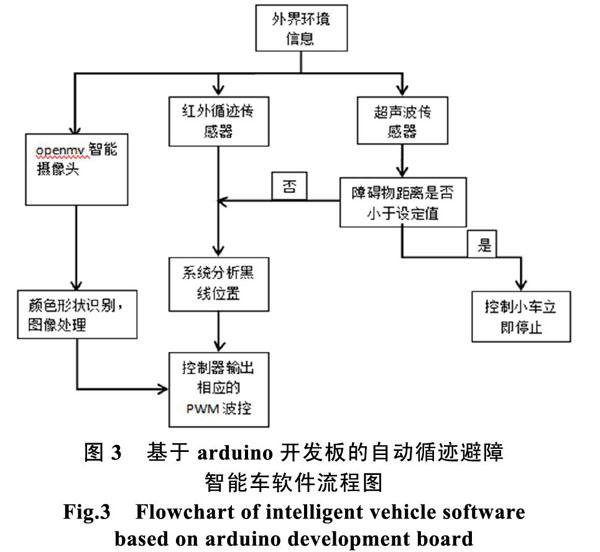
系统主体设计流程图如图3所示。对于模拟测试赛道三个不同路段,分别对应不同的控制算法。
3 控制原理及算法设计
通过在小车的各个位置加装红外传感器、超声波传感器等。收集小车的自身位置信息,将其传输给处理器处理后,通过控制PWM波,改变小车的运动状态,达到自动控制通过路段的目的。利用智能摄像头的图像识别以及测距原理,对小车进行追踪控制。
3.1 循迹路段控制算法设计
采用红外传感器并附加PID控制算法,确定轨道位置,保证精确运行。
红外传感器布局方式如图4所示,假设循迹线宽3 cm,利用三路红外,外侧两路通过获取电压值判断与循迹边缘线的距离,中间一路红外用于确定循迹线在行驶路程中间[6-8]。
对于红外循迹PID算法研究,其原理图如图5,图6,图7所示。经过一系列数据处理,可以得出智能小车的位置与红外传感器处理后的AD值成线性关系,由此可进行PID控制算法处理。
3.2 避障路段控制算法设计
采用超声波传感器,探测前方是否有障碍物。超声波传感器向前方发射一组方波信号,自动检测是否有信号返回,通过时间差,测定障碍物距离小车的位置。
随后通过控制PWM波的输出控制电机的转速,由于两个直流减速电机的差速控制,小车前面的万向轮会随之转向,以此来改变小车的运动状态,进行避障处理。
3.3 小球追踪路段算法设计
对于摄像头图像识别追踪小球的算法研究,其原理图如图8所示。利用openmv智能摄像头,进行颜色和形状识别,将数据传输给arduino单片机运行图像处理算法,从而对有色小球进行追踪。
4 系统实际测试
为了验证理论研究的正确性,本文搭建了基于arduino开发板的自动循迹避障智能车控制系统测试赛道,对系统实际控制的稳定性,快速性和准确性等性能指标,进行了实验研究。
不同路段对应的测试时间数据测试记录表格1所示,由实测数据可以看出,该控制系统满足稳定性,快速性和准确性的性能指标。具有良好的稳态特性及动态响应。
5 测试实验结论
本文论述了基于arduino开发板的自动循迹避障智能车控制系统设计原理,并搭建了模拟测试赛道对系统进行实际测试,实验结果表明这种基于arduino开发板的自动循迹避障智能车控制系统,满足自控系统快速性,准确性,稳定性的要求,在算法上具备智能化特点,具有良好的控制效果,可以应用于基本人工智能领域,具有研究意义和应用价值。
参考文献
<!--[if !supportLists]-->[1] <!--[endif]-->范云飞, 任小洪, 袁文林. 基于并联PID 的四旋翼飞行控
制策略设计[J]. 软件, 2015, 36(4): 37-39.
<!--[if !supportLists]-->[2] <!--[endif]-->李拓, 杜慶楠. 基于 TMS320F28335 的三相感应电机矢量控制系统的研究[J]. 软件, 2018, 39(3): 130-135.
<!--[if !supportLists]-->[3] <!--[endif]-->刘明. 计算机技术应用下的电气自动化控制系统设计分析[J]. 软件, 2018, 39(6): 170-173.
<!--[if !supportLists]-->[4] <!--[endif]-->侯贵洋, 赵桂杰, 王璐瑶. 草莓采摘机器人图像识别系统研究[J]. 软件, 2018, 39(6): 184-188.
<!--[if !supportLists]-->[5] <!--[endif]-->孟祥宾, 朱军, 李紫豪, 等. 多重自适应卡尔曼滤波 PMLSM 无传感控制[J]. 软件, 2018, 39(8): 18-23.
<!--[if !supportLists]-->[6] <!--[endif]-->李慧霞, 高梓豪. 室内智能移动机器人规则物体识别与抓取[J].软件, 2016, 37(02): 89-92.
<!--[if !supportLists]-->[7] <!--[endif]-->刘志强, 孙怀远, 宋晓康. 基于机器视觉的药品包装滤波算法实现[J]. 软件, 2018, 39(9): 93-96.
<!--[if !supportLists]-->[8] <!--[endif]-->张乐玫, 罗涛. 室内定位特征选择算法研究[J]. 软件, 2015, 36(1): 38-46.
<!--[if gte vml 1]>![]() <!--[endif]-->
<!--[endif]-->
