坡度道路上汽车主动避撞策略与仿真验证
2020-12-24邓国红谢川人杨鄂川
邓国红,谢川人,徐 泽,杨鄂川
(重庆理工大学 a.机械工程学院;b.车辆工程学院,重庆 400054)
近年来,由于国内汽车工业的飞速发展,汽车保有量的不断增加,导致道路交通安全形势严峻。2016年公安部统计数据表明,全年国内发生交通事故21万多起,死亡人数约6.31万人,产生的经济损失高达12.08亿元[1]。美国高速公路管理局NTHSA调查结果表明,大约90%的交通事故是由驾驶员操作不当所致[2]。汽车主动预警/避撞系统(collision warning/collision avoidance,CW/CA)综合利用现代信息技术、传感技术,能够提前预见碰撞危险,并向驾驶员发出警告。如果驾驶员对避撞系统发出的警告信号未正确应对,那么系统将接替驾驶员采取主动制动的方式实现避撞或减轻碰撞的程度。IIHS(美国高速公路安全保险协会)研究指出,车辆若配置基础的辅助驾驶系统能够避免超过60%的交通事故[3]。
在以往的主动避撞系统研究中,主动避撞策略的开发主要针对水平路面,主动避撞系统性能测试也主要选择在水平路面上,并未考虑坡度路面。由于车辆本身动力学和道路坡度的影响,基于水平路面设计的主动避撞策略也许并不适用于坡度路面[4]。由于我国道路存在大量的坡道,在坡道上运用牛顿运动学定律计算碰撞危险判定指标TTCP,可以充分利用车辆的行驶信息和道路环境信息,来准确评估当前的碰撞危险程度。同时对车辆避撞条件分析引入了预警门限值Tw。基于TTCP和Tw设计了符合坡度路面的主动预警/避撞策略,考虑不同的道路坡度,在Carsim/Simulink联合仿真环境中对该策略进行仿真,检验策略的有效性。
1 危险目标分类
自车在行驶过程中,安装在自车前端的探测器能够探测到周围多数目标的运动信息,但是在当前的行驶环境中,大部分目标信息对自车运行并不构成威胁。因此,当探测器将目标信息传输给控制器之后,控制器必需能迅速、准确地从所有接收的目标信息中筛选出对自车行驶安全有威胁的主目标[5]。
图1建立了车辆5车道行驶环境俯视图,图中有9辆正在行驶的车辆,其中有5辆在自车雷达探测范围内。在t时刻,如图1(a)所示,此时将同车道内正在行驶的A车作为主目标。在t1时刻,如图1(b)所示,由于相邻左车道的B车即将变道行驶,而相邻右车道的C车已经变道,所以此时对自车行驶安全有危险的主目标为C车。总之,根据“同车道最近车”原则,自车会把同车道正前方最近车辆视为危险目标,相邻车道车辆视为潜在危险目标,其他车辆视为非危险目标[6-7]。
将车辆宽度设为L,车道宽度设为L1,相邻车道车辆车头到自车中心线的距离为Si,雷达探测范围内各目标的方位信息为 Pi(di,vi,θi),将图 1中的(b)图放大如图2所示。危险目标分类算法为:当时,定义该目标为危险目标,此时应该将该目标作为主目标;时,定义该目标为潜在危险目标,以右车道C车为例,如果此时C车靠近自车所在车道,将会逐渐演化为危险目标;当 Si=di·时,定义该目标为非危险目标。
2 车辆避撞条件分析
车辆要实现避撞,必需考虑2个关键的因素,分别为驾驶员反应时间和不同工况下驾驶员的制动减速度。其中驾驶员反应时间主要包括大脑信息加工时间、释放油门踏板时间和踩下制动踏板时间。ZHANG Yizhen[8]统计了100名驾驶员在自然条件下的避撞反应时间,统计数据如表1所示,通过对数据进行分析,得出驾驶员的平均自然反应时间为1.33 s,方差为0.27。同时随着驾驶员年龄的增大,避撞反应时间也增加。

表1 不同年龄驾驶员自然避撞反应时间
当车辆配备碰撞预警辅助系统时,驾驶员反应时间明显低于驾驶员自然反应时间。表2为不同预警信号下驾驶员反应时间,从表中可以看出,声光预警作用下,驾驶员平均反应时间仅为0.9 s,而在听觉预警和视觉预警作用下,驾驶员平均反应时间分别为0.99 s和1.13 s。由此可见,存在碰撞预警辅助时,驾驶员避撞反应时间会明显缩短,声光预警效果更明显[8]。

表2 不同预警信号下的驾驶员反应时间
制动减速度为当前工况下驾驶员对碰撞危险程度所采取的制动强度。美国高速公路管理局(NHTSA)在不同工况下对多名驾驶员进行测试,得出了不同驾驶员的制动避撞数据,如表3所示。对该数据进行分析,可以得出驾驶员制动时的制动减速度均值为 0.38g[9]。
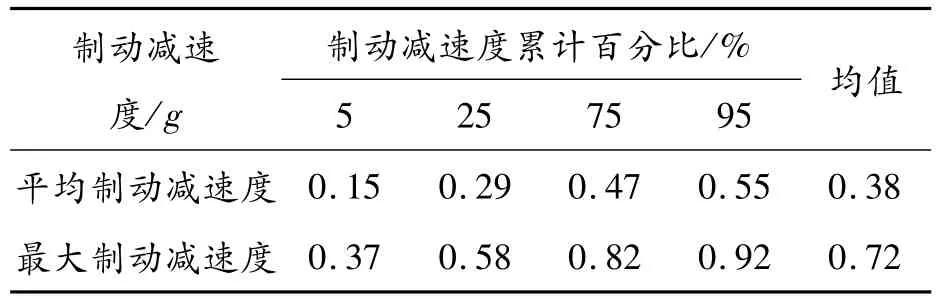
表3 驾驶员制动减速度统计
车辆能否有效避撞,除了考虑驾驶员反应时间和制动减速度外,还需要考虑车辆本身制动系统反应时间和制动器起作用时间。制动系统反应时间为踏板克服自由行程和制动器间隙所需的时间之和,主要与车辆自身结构有关,液压制动系统的反应时间为0.015~0.03 s,此时车辆仍以原状态行驶;制动器起作用时间为轮缸建立压力所需的时间,液压制动系统起作用的时间为0.15~0.3 s,这段时间汽车减速度逐渐增加[10]。
3 主动预警/避撞策略设计
3.1 基于TTC值的主动制动避撞策略
碰撞时间TTC(time to collision)模型的避撞逻辑为:如果TTC值小于驾驶员反应时间和制动器制动延迟时间之和,驾驶员并未采取正确的方式进行应对,那么系统会立即接替驾驶员对车辆进行控制,采取增大制动主缸压力等措施来避免或减轻碰撞。图3为一个传统的驾驶场景,后车为自车,x1、x2分别为自车和前车当前所在位置。
则TTC值可以由下式计算:
式中:xrel(xrel=x1-x2)为自车和前车的相对距离,vrel(vrel=v1-v2)为自车与前车的相对速度,arel(arel=˙v1-˙v2)为自车与前车的相对加速度[11]。
3.2 基于TTCP值的主动制动避撞策略
3.2.1 危险判定指标
危险判定指标能定量地反映出当前工况下留给主动避撞系统实现避撞操作的时间余量,因此可以直接作为主动避撞系统的有效判据。由于车辆在坡道上运动时受到坡度i的影响,将引起地面附着力的变化,造成加速度的变化,从而影响车辆的制动效能。目前大多数的主动避撞算法并未考虑坡度i对车辆避撞的影响。笔者通过分析车辆在坡道上的运动学特性,将坡度i引入进行危险判定指标的设计,用以提高车辆在坡道环境下的主动避撞效能。车辆在坡道上的受力简图如图4所示。
根据车辆在坡道上的受力简图,定义新的碰撞危险判定指标TTCP:
式中:i为道路坡度;v1为自车速度;a1为自车最大制动减速度。
车载DGPS接收机水平定位精度为8 mm,高程定位精度为15 mm,水平速度精度优于0.1 km/h,道路坡度θ可由车载DGPS接收机实时获取。不同坡度环境下TTCP值的计算方法如式(3)~(8)所示。
式中:vxDGPS、vyDGPS和vzDGPS分别为车载DGPS实时获取的横向、侧向和垂向速度;Fφ为地面附着力;m为整车质量;g为重力加速度;φ为地面附着系数;Tφ为制动时间;Sφ为制动距离。
3.2.2 主动制动避撞策略设计
在坡度条件下,危险判定指标TTCP作为车辆避撞的有效判据,能够直接应用于主动避撞逻辑设计,图5为所设计的主动避撞逻辑。当前方目标速度突然骤减或突然出现障碍物时,驾驶员由于部分原因并没有采取及时有效的方式进行应对,当TTC值小于TTCP值时主动避撞系统将立即接管车辆控制权,增大主缸制动压力,实现车辆避撞或减少碰撞的程度。
由于主动避撞系统一旦触发会严重影响驾驶员的正常驾驶,因此系统触发信号必需是真实可信的。为避免主动避撞系统被误触发,在仿真模型中设计了一个3次检测系统,用于检测主动避撞触发信号,只有当信号连续多个值同时满足主动避撞的条件时,主动避撞系统才触发,提高算法稳定性[12-13]。3次检测系统流程如图6所示,n为当前时刻,通过传感器数据采集计算TTCP和TTC,只有连续3个时刻的TTC<TTCP时,主动避撞系统才被触发;若有一个时刻不满足条件,将返回第3步重新计算TTCP和TTC。当信号满足主动避撞系统触发条件时,主动避撞系统介入,则需要极大的制动减速度始终作用于车辆,直到车辆停止运动[6]。由于车辆在坡道上运动时,路面附着力相比于水平直道更小,车辆的制动效能更低,为了在紧急情况下能有效避撞或最大程度地减轻碰撞,当避撞系统触发后,车辆直接以最大制动力制动,直至自车停止。
驾驶员作为车辆的优先控制者,当主动避撞系统触发后直至车辆停止的任何时刻,若驾驶员自行采取制动或加速措施避撞(踏板阈值设为20%),主动避撞系统将立即解除对车辆的控制,从而确保驾驶员对车辆的优先控制权。
3.3 主动避撞预警策略设计
车辆在行驶过程中,若驾驶员预先1~2 s意识到碰撞危险且以正确的措施应对,则能够实现有效避撞,因此预警策略设计的合理性是驾驶员能否有效避撞的关键[2]。预警策略最重要的是预警时机的选择,预警时机要求适应多数驾驶员的避撞特性。为了合理地确定预警时机,笔者通过对车辆避撞条件进行分析,定义预警门限值Tw:
式中:ab、tp和tb分别为驾驶员制动过程平均减速度、驾驶员避撞平均反应时间和制动器起作用时间。
预警时机要求驾驶员有一定反应时间的情况下,能保证驾驶员在接收到预警信号后有足够的时间采取有效的制动措施避免与前方车辆发生碰撞。同时,预警时机还需考虑车辆本身制动系统起作用时间,通过综合考虑以上因素,建立预警门限值Tw计算(如式(10)所示)。当 TTC<Tw值时,将通过声光预警的方式提醒驾驶员实现避撞或减少碰撞的程度。
式中:驾驶员制动减速度ab取0.38g,驾驶员反应时间tp取0.9 s,制动器起作用时间tb取0.33 s。
主动预警/避撞策略流程如图7所示,各流程最终返回到第3步,进行各主要变量计算,之后重新进入下一流程,如此循环。
4 仿真分析
自车选用Carsim2016.1中C-Class Hatchback 2012,同车道前车选用D-Class SUV V9。以同车道最近前车作为危险目标,参照E-NCAP(欧洲新车安全评鉴协会)关于自动紧急制动系统(autono-mous emergency braking system,AEB)的测试方法,同时基于我国《公路工程技术标准》中对于坡度的规定,选用前车静止的CCRs城郊工况、前车慢行的CCRm工况和前车紧急制动的CCRb城郊工况,道路坡度分别为0、5%、7%和9%,通过Carsim/Simulink联合仿真来检验避撞策略的有效性。
4.1 不含坡度工况
4.1.1 前车静止工况(CCRs)
策略检验结果如图8所示,自车以50 km/h的速度匀速行驶,两车相距100 m,路面附着系数0.85。2.47 s时,TTC<Tw,预警系统发出预警信号,提醒驾驶员采取措施应对即将发生的碰撞危险。由于仿真设置未考虑驾驶员操作,自车仍以原速匀速行驶,两车逐渐靠近,TTC值则逐渐减少。6.24 s时,经过3次检测系统检测,TTC<TTCP,主动避撞系统介入,施加10 MPa的制动压力,制动减速度为8 m/s2,相对速度和相对距离仍逐渐减少。7.82 s时,相对速度减少为0,此时相对距离最少为4.34 m,成功避撞,危险状态解除,卸载制动压力。
4.1.2 前车慢行工况(CCRm)
策略检验结果如图9所示,自车以65 km/h的速度匀速行驶,前车以20 km/h的速度匀速行驶,两车相距100 m,路面附着系数0.85。3.52 s时,TTC<Tw,预警系统发出预警信号,提醒驾驶员采取措施应对即将发生的碰撞危险。由于仿真设置未考虑驾驶员操作,自车仍以原速匀速行驶,两车逐渐靠近,TTC值则逐渐减少。7.11 s时,经过3次检测系统检测,TTC<TTCP,主动避撞系统介入,施加 10 MPa的制动压力,制动减速度为8 m/s2,相对速度和相对距离仍逐渐减少。8.72 s时,相对速度减少为0,此时相对距离最少为1.52 m,成功避撞,危险状态解除,卸载制动压力。由于前车仍以20 km/h的速度匀速行驶,当前车停止后,两车相对距离逐渐增大,相对速度为20 km/h。
4.1.3 前车制动工况(CCRb)
策略检验结果如图10所示,开始时自车与前车皆以50 km/h的速度匀速行驶,两车相距40 m,路面附着系数0.85。3 s时前车以-6 m/s2的制动减速度制动,5.32 s时前车停止。4.64 s时,TTC<Tw,系统发出预警信号,提醒驾驶员采取措施应对即将发生的碰撞危险。由于仿真设置未考虑驾驶员操作,自车仍以原速匀速行驶,两车逐渐靠近,TTC值则逐渐减少。6.05 s时,经过3次检测系统检测,TTC<TTCP,主动避撞系统介入,施加10 MPa的制动压力,制动减速度为8 m/s2,相对速度和相对距离仍逐渐减少。7.93 s时,相对速度减少为0,此时相对距离最少为2.62 m,成功避撞,危险状态解除,卸载制动压力。
4.2 含坡度工况
4.2.1 前车静止工况(CCRs)、道路坡度5%
策略检验结果如图11所示,自车以50 km/h的速度匀速行驶,两车相距100 m,路面附着系数0.85。2.05 s时,TTC<Tw,预警系统发出预警信号,提醒驾驶员采取措施应对即将发生的碰撞危险。由于仿真设置未考虑驾驶员操作,自车仍以原速匀速行驶,两车逐渐靠近,TTC值则逐渐减少。5.91 s时,经过3次检测系统检测,TTC<TTCP,主动避撞系统介入,施加10 MPa的制动压力,制动减速度为8 m/s2,相对速度和相对距离仍逐渐减少。7.74 s时,相对速度减少为0,此时相对距离最少为2.54 m,成功避撞,危险状态解除,卸载制动压力。
4.2.2 前车慢行工况(CCRm)、道路坡度7%
策略检验结果如图12所示,自车以65 km/h的速度匀速行驶,前车以20 km/h的速度匀速行驶,两车相距100 m,路面附着系数0.85。3.18 s时,TTC<Tw,预警系统发出预警信号,提醒驾驶员采取措施应对即将发生的碰撞危险。由于仿真设置未考虑驾驶员操作,自车仍以原速匀速行驶,两车逐渐靠近,TTC值则逐渐减少。6.34 s时,经过3次检测系统检测,TTC<TTCP,主动避撞系统介入,施加10 MPa的制动压力,制动减速度为8 m/s2,相对速度和相对距离仍逐渐减少。7.99 s时,相对速度减少为0,此时相对距离最少为4.54 m,成功避撞,危险状态解除,卸载制动压力。由于前车仍以20 km/h的速度匀速行驶,当前车停止后,两车相对距离逐渐增大,相对速度为20 km/h。
4.2.3 前车制动工况(CCRb)、道路坡度9%
策略检验结果如图13所示,开始时自车与前车皆以50 km/h的速度匀速行驶,两车相距40 m,路面附着系数0.85,3 s时前车以-6 m/s2的制动减速度制动,5.32 s时前车停止。4.52 s时,TTC<Tw,系统发出预警信号,提醒驾驶员采取措施应对即将发生的碰撞危险。由于仿真设置未考虑驾驶员操作,自车仍以原速匀速行驶,两车逐渐靠近,TTC值则逐渐减少。5.92 s时,经过3次检测系统检测,TTC<TTCP,主动避撞系统介入,施加10 MPa的制动压力,制动减速度为8 m/s2,相对速度和相对距离仍逐渐减少。7.77 s时,相对速度减少为0,此时相对距离最少为2.94 m,成功避撞,危险状态解除,卸载制动压力。
5 结论
通过分析车辆在坡道上的运动学特性,基于不同车辆方位信息对危险目标进行分类,考虑不同坡道上车辆的最大制动减速度,运用牛顿运动学定律计算了危险判定指标TTCP,同时对车辆避撞条件进行分析,引入了预警门限值Tw,以TTC值为判定条件,设计了一种新的主动预警/避撞策略。参照E-NCAP关于自动紧急制动系统的测试方法,考虑我国《公路工程技术标准》中对于坡度的规定,在Carsim/Simulink联合仿真环境中建模,对所提出的主动预警/避撞策略进行检验,仿真结果表明:所提出的主动预警/避撞策略能有效避撞,提高车辆在坡度条件下的行驶安全性。
