拖轮在协助靠离泊操作中的运用
2020-12-23孙永泽
孙永泽
摘 要:船舶的日益大型化,使拖轮的协助变得越来越常态化。通过拖轮协助操作的深入探讨,使船舶靠离泊作业变得更加安全、高效。
关键词:拖轮协助;靠离泊码头
中图分类号:U675 文献标识码:A 文章编号:1006—7973(2020)11-0119-02
纵观拖轮的发展历程,从单车、单舵的FPP型到CPP型,再到后来360度旋转推进的VSP型和ZP型,最終以综合性能占优的ZP型拖轮在我国各大港口得到广泛的应用。为了保证靠离泊操作的安全性与高效性,拖轮的深入运用成为每个驾引人员的必修课。
下面根据不同的靠离泊情况对拖轮的协助操作进行分类探讨。
1单拖轮协助离泊时
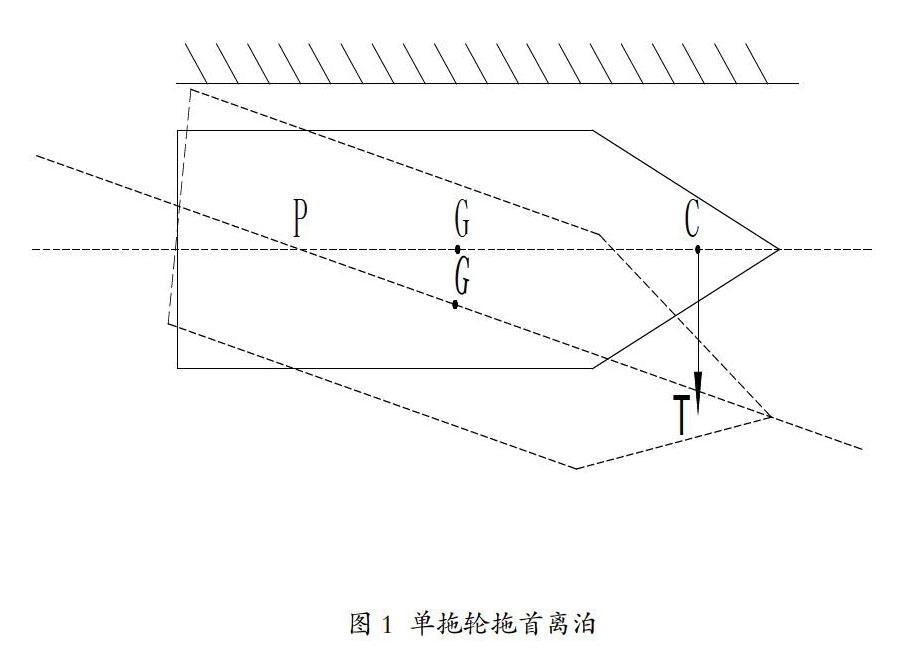
以常见的单拖轮拖首离泊为例,如图1所示。
图中,G为被协助船船舶重心,P为被协助船船舶转心,C为拖轮作用点。
GP与GC的关系可表示为:GP≈(0.35L)2/GC。
由公式可知:当C点在G点附近时,P点在船尾的无穷远处,船舶只有横移而无旋转。要使船舶旋转,就应使C点尽量远离G点。计算可知当CG=1/6L,即C点距离船头位置约1/3L时,GP=1/2L即转心P点正好在船尾。所以当C点在距离船头位置1/3L-1/2L时,转心P点在船尾和船尾方向的延长线上,在离泊过程中船舶上任一点的横移方向是远离码头的,能够保证船舶的安全离泊。
在实际的单拖轮首离泊操作中,除了拖轮作用点位置的正确应用,驾引人员还应根据当时风、流情况,适时地合理运用被协助船的车舵来保证船尾与码头的安全距离。控制好转头速率是安全离泊的关键,过快的转头速率会导致拖轮无法保持拖力方向始终与被协助船保持垂直,而产生船舶首尾方向的分力,导致被协助船发生前冲或后缩的现象。
2双拖轮协助离泊时
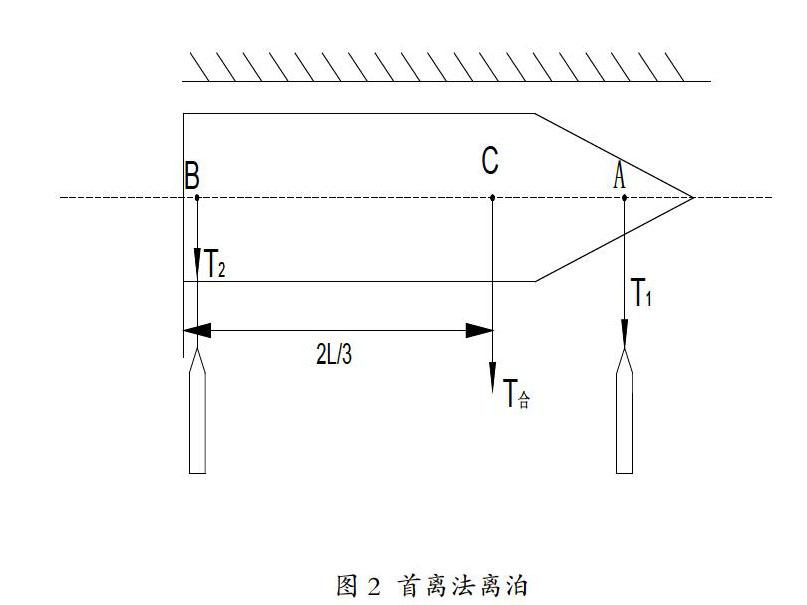
常规操作中,驾引人员会先使被协助船舶横移出安全的横距后,再进行首离泊操作。但有的泊位区域受限,需直接采用首离法,如图2所示。
T1 为首拖力,A为作用点;T2为尾拖力,B为作用点;T合 为合力,C为合力作用点。
船首尾同时受拖力T1 和T2的作用时,根据力的合成与分解原理和公式GP≈(0.35L)2/GC的推导可知,当T合的作用点C在距船首1/3L-1/2L之间,转心P点在船尾方向的延长线上,在整个离泊过程中船舶各点的横移方向是与码头相反的,能够保证船舶与码头无碰撞危险。
通过公式T合=T1+T2;AC/BC=T2/T1 的推导可知,为了使合力作用点C在离船首1/3L-1/2L的区间之内,从而船舶转心P在船尾或船尾延长线上。需要满足1/2≤T2/T1≤1,即船尾拖轮拖力小于船头拖轮拖力,且大于等于1/2船首拖力。实际操作中,当被协助船船首转出一定角度后,会将船尾拖轮拖力改为顶推船尾,来获得更快的转头速率。值得注意的是,此时由于船尾受力方向的变化,转心P会从船尾或船尾延长线上向船舶内部转移,且船尾拖轮顶推力越大,转心P离船头越近。有些经验不足的驾引人员会以驾驶台到船尾距离作为衡量船舶与码头安全横距的标准,错误之处在于主观上把转心P点放在了驾驶台的位置。通常当被协助船首尾拖轮力方向不同时,转心P都在驾驶台之前,以驾驶台到船尾距离作为衡量船舶与码头安全横距的标准,会增加船舶与码头的碰撞危险。此时应配合被协助船的车和舵,根据旋转速率和横距变化的速率做出适时的调整,从而使离泊达到高效、稳定、安全的目的。
3单拖轮协助靠泊时
这种情况下,通常被协助船尺度较小,操作方法丰富多样,可根据当时风、流、码头位置、船舶自身状况所决定。
本港操作中,单拖轮船尾带长缆起常规减速和应急操作的作用;船首拖外挡短锚起常规减速和方便离泊的目的。靠泊方式采用大角度,保持车舵配合靠泊,以外挡锚和船尾拖轮的减速效果代替传统的停车淌航靠泊方法。以船首能带缆绳作为安全距离的标准,最后以船尾拖轮调整被协助船船尾能带缆绳作为初始靠泊工作的完成。
4多拖轮协助靠泊时
由于此类被协助船舶通常具有尺度大、吃水大、惯性大的特点,会采用顶风、顶流、首入泊角的方式靠泊,同时拖轮操作是安全靠泊操纵的重点。
下面主要从拖轮的三种主要操作进行探讨:
4.1拖轮协助减速
由于船舶的大型化和航道与码头区域限制性的特点,停车与倒车减速已不能适应安全靠泊的要求,而主要的方式来自拖轮减速。拖轮减速方式多以平行减速为主,此时被协助船速度不宜超过5节,避免由于拖轮主机负荷过大而带来主机受损的风险。另外,过大的缆绳负荷在有风浪的天气中很容易发生断缆的情况。值得注意的是,在减速过程中应尽量避免被协助船进行大角度的旋转操作,从而使拖力的方向与被协助船产生夹角,降低拖轮减速的效果。
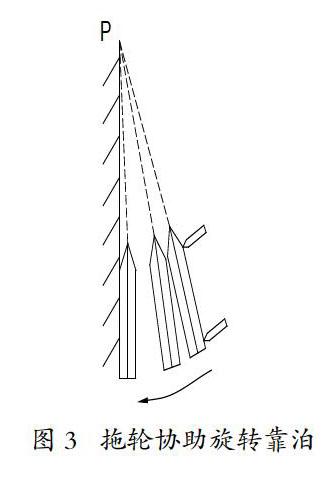
4.2拖轮协助旋转靠泊
理想的靠泊模式如图3所示:
通过对被协助船首尾拖轮顶推力大小的调整,达到以船首尾线与码头交点做为转心P的旋转靠泊操作,形成一种类似于“钟摆”的运动轨迹。在实际的操作中,转心P点应取在泊位之外,利用船舶首尾线与码头交点沿码头前后变化的规律,来合理利用拖轮协助。在旋转靠泊的过程中,P点前移,说明船尾横移速度相对过快,需要减小船尾的横移速度或者加大船首的旋转速度;P点后移,说明船首横移速度相对过快,需要减小船首的横移速度或者加大船尾的旋转速度。需要注意的是,在靠泊过程中,应避免被协助船舶有过快的进速。因为在拖轮顶推靠泊过程中,除了主要的顶推功率外,还要分出一部分功率来维持拖轮与被协助船的垂直摆位,过快的船速就会发生为了保持垂直摆位而降低顶推功率的现象。另外,在拖轮的非垂直摆位下会产生纵向的分力,同时也会降低横向推力效果,应尽量避免这种摆位不正的情况。拖轮摆位不正的因素通常有:拖轮驾驶员操作不当;风流或涌浪的影响导致上下颠簸或左右摇摆;拖轮顶推位置船体不平曲线较大等。但最主要的原因是被协助船速度过快,所以靠泊时应尽量保证船速为零。
4.3拖轮协助平贴泊位
靠泊最后的平贴操作主要依赖拖轮的协助来完成,且需要更加精准的操作。平贴泊位需要速度尽可能的小、角度尽可能的小,最好都是“零量”操作。如要达到“零量”靠泊,需要首尾拖轮调整拖力大小来实现。值得注意的是,即使是只有船首或船尾一端速度过快,也应该首尾拖轮同时备拖。根据首尾拖轮常规的带缆位置和公式GP≈(0.35L)2/GC可知,当船首或尾一端受力时,会在重心G为中心的对应端的船身上形成转心P点,从而导致此端的横移速度被加快。如未提前做好备拖的准备,会发生操作不及时而此端碰撞码头的危险。
5结语
拖轮的合理、熟练、高效应用已经成为驾引人员的必修课。我们要通过对船舶操纵理论的不断深入学习和实践工作中的不断总结形成一套适合自己的操作风格,为航运生产提供优质、安全、高效的服务。
参考文献:
[1] 古文贤.船舶操纵[M].大连:大连海运学院出版社,1993.
[2] 施内克鲁特.船舶水动力学[M].上海:上海交通大学出版社,1997.
