三维成像声呐在排体搭接检测中的应用
2020-12-23程智慧许吉羊
程智慧 许吉羊

摘 要:本文介绍了三维成像声呐的系统组成和工作原理,以及其在航道整治工程水下软体排搭接检测中的应用。实际应用结果表明,三维成像声呐能够很好的获取水下软体排当前位置的搭接情况,通过三维立体呈现,获得更加直观、准确的检测数据,并且能够提取检测区域内和河床信息和排体边缘变化趋势,为后续铺排提供技术参考。
关键词:三维成像声呐;软体排;搭接宽度检测
中图分类号:U61 文献标识码:A 文章编号:1006—7973(2020)11-0072-04
1 绪论
1.1引言
长江是货运量位居全球内河第一的黄金水道,长江航道是我国国土空间开发最重要的东西轴线,在区域发展总体格局中具有重要战略地位,“十三五”期间,航道工程建设规模、投资力度将达到历史新高度,建设速度明显加快,通航能力将得到极大的提高。然而航道工程建设中,涉及到大量的水下隐蔽工程,其质量的好坏是决定整个工程成败的关键环节。护底工程是航道整治的一项重要内容,而水下软体排铺设是各项航道整治工程的基础,足够的沉排搭接宽度则是保证护底质量的关键。
1.2传统的排体检测方法
传统的航道整治工程中对水下铺排检测采用的最为成熟的手段为水下探摸摄像检测。水下探摸摄像检测是采用潜水员水下探摸的方式进行水下铺排的检测。由潜水员携带水下电视进行水下摄像,通过判别排体上的彩色检测条来判定搭接宽度。
但水下探摸摄像检测作为事后质量控制手段,只能起到事后检验施工质量的作用;为了对铺排施工质量进行实时监控,实时反应铺排过程中的搭接情况,可以对沉排质量进行动态跟踪,实现水下工程的事中质量控制。一旦发现沉排质量出现问题,可以即时根据铺排状况进行现场调整,采取有针对性的措施,改善铺排施工质量,达到事中质量控制。
三维成像声呐系统能够获取目标精细的三维点云数据,从而可以对水下软体排搭接区域进行扫测,以提供直观、精确的排体搭接情况。本文阐述了三维成像声呐的基本组成和原理,并结合武安段II标实际工程,对三维成像声呐在排体搭接检测中的应用进行了分析。
2 三维成像声呐
三维成像声呐可生成水底地形、建筑物和目标物的高分辨率三维点云图像。声呐采用紧凑型低重量设计,既可以在三脚架或ROV上进行安装,也可以根据需要自行设计支架安装。扫测时,只需在控制端进行相关参数设置,并触动按钮,声呐就会生成水下景象的三维点云。扫描声呐头和集成的云台可以生成扇区扫描和球面扫描数据。
2.1系统组成
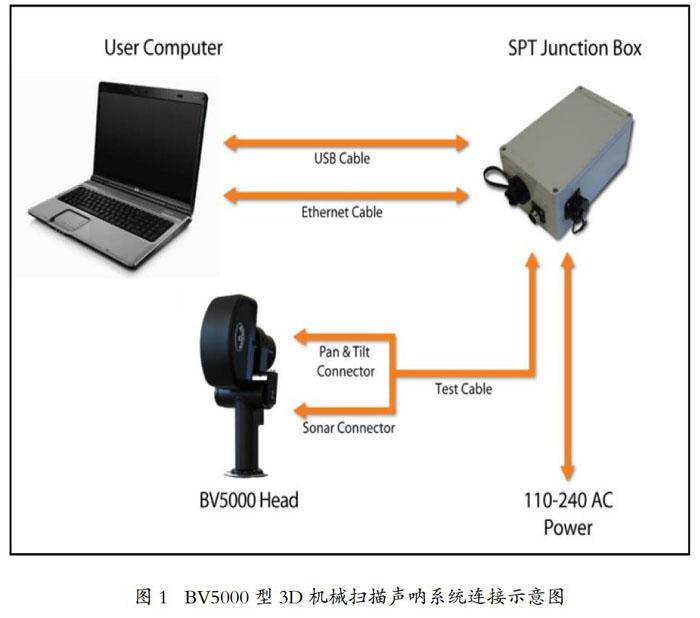
三维成像声呐系统包括硬件和软件两部分。以BV5000型3D机械扫描声呐为例,其中硬件部分主要包括声呐头、云台、甲板单元及数据传输电缆等;软件部分主要包括仪器研发团队自主开发的Proscan、BlueViewer和第三方软件Cyclone及相关驱动程序。其中声呐头和云台通过专用线缆连接到接线盒上,接线盒又通过以太网电缆和USB传输线与计算机连接,从而实现计算机与声呐和云台之间的通信,系统示意图见图1。声呐头发射并接收声呐信号,云台控制声呐头的旋转和俯仰角度,Proscan是实时控制软件,可控制云台转动及声呐的相关参数,BlueViewer软件可进行点云数据査看和基本量测,第三方软件Cyclone可进行点云数据编辑处理。
2.2 工作原理
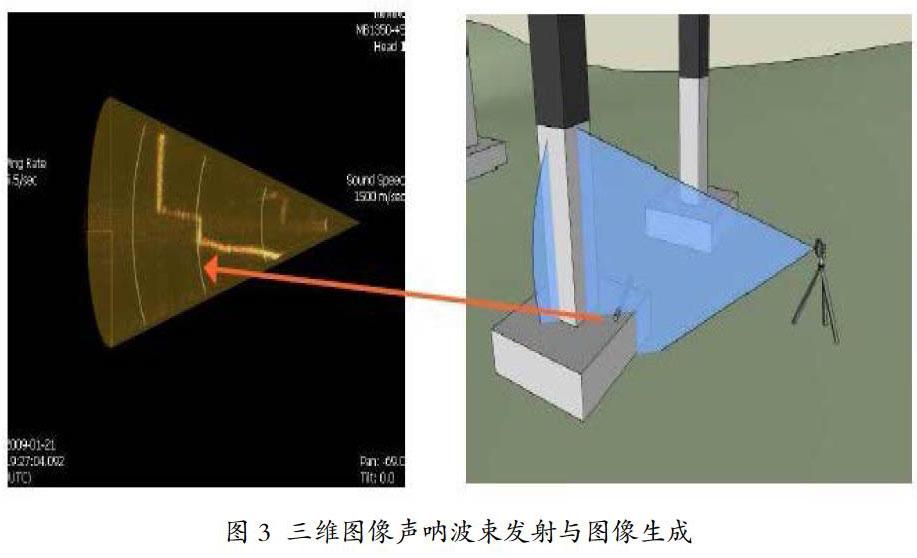
三维成像声呐系统进行水下扫测的基本原理为声学测距,通过声学闪耀阵列将不同频率声波按一定的角度辐射形成扇面,不同频率对应不同的辐射角度,声波经目标反射后被声学接收器所接收,声学接收器也是一个声学闪耀阵列。后期通过短时傅里叶变换(STFT)等方式通过不同频率形成不同方向波束,进而形成扇面图。声波接收器闪耀阵列被布置成能够使得目标反射的声场分量产生具有与被重现的声场成分的入射角对应频率的声波。其基本的形成过程如图2所示。
扇面内中央波束的频率可以为1.35MHz和2.25MHz两种,当声波遇到物体时会发生散射,散射回波沿入射路径返回至接收装置处,接收装置按等时间间隔进行回波信号采样,其采样时间间隔为10-5秒。
通过扇面内不同波束的回波序列分别进行底质检测,选取每个波束中回波强度最大的点作为感兴趣点进行目标提取。如图4所示。
三维图像扫描声呐发射一次脉冲可测量256个点云坐标,即1ping点云数据在探头云台改变水平指向和垂直倾角的过程中不断重复上述测量过程,便可获得多ping点云坐标。
2.3 检测方式
在铺排船铺完一段排体后绑系砼块期间,三维成像声呐系统开始对目标区域进行扫描,获取水下排体实时情况,完成数据采集工作,然后经过软件的初步自动处理后在PC端显示生成的水下三维图像,分析软体排搭接情况[4]。
该套三维成像声呐系统对铺排施工过程的质量进行实时监控,对沉排搭接的质量进行动态跟踪,实现了水下施工的事中质量控制。在检测过程中,一旦发现可能出现问题的情况,可以及时预警,根据现场状况进行相应地调整,采取针对性措施,规避风险,保证铺排質量。
3 应用实例
3.1 项目概况
长江干线武汉至安庆段6米水深航道整治工程建设范围为长江干线天兴洲长江大桥至安庆皖河口,全长约386.5公里。航道建设等级为Ⅰ级,建设标准为6.0米×200米×1050米(水深×航宽×弯曲半径),部分重点碍航滩段航宽不低于110米(满足设计代表船型的单船双向通航、船队单向通航),设计最低通航水位年保证率为98%。主要建设内容包括:自上而下整治湖广-罗湖洲、沙洲、戴家洲、鲤鱼山、张家洲、马当、东流等7个碍航滩段;建设护滩带24道、护底带4道,坝体10道,高滩守护15.4公里,护岸加固13.3公里,基建疏浚477万方,配套建设航道整治工程建筑物助航标志63座,改造现有航行标志和已有航道整治工程建筑物助航标志147座,并实施生态建设工程。
为了保护长江河道的河床地质,避免水流冲击导致航道整治工程的护底、护脚出现掏空损坏,对航道整治工程的水下建筑物均采取了铺排的处理措施。水下护底的检测,主要也是针对水下软体排搭接的检测,我们在武安段II标段航道整治工程的水下建筑物采取了三维图像声呐。
水下工程的施工质量,目前主要是靠施工过程中的管理以及水下地形测图来进行控制。受测量精度限制,水下地形测量也不能完全反映工程实际施工质量,因此施工质量难以得到保证。
为准确掌握航道整治水下隐蔽工程质量状况,特在武安段航道整治工程水下护底建设过程中推广应用水下实时监控检测技术,确保了航道整治工程的施工质量,可以为水下隐蔽工程质量控制、质量验收提供了科学依据。
铺排船在铺完一段排体后,在绑系砼块期间,通过图像声呐进行扫描,对水底铺排质量数据实时采集,搭接状况将直接在铺排船操作室显示屏上显示出来,技术员将铺排情况向现场负责人报告,现场负责人根据铺排搭接情况通知船长调整船舶动向,进而达到铺排施工中过程控制的目的。
3.2 检测水下软体排搭接宽度
实时扫描完成后形成的图像能够展示扫描区域水下的真实情形,尤其是上排体和下排体各自的排布边线。通过量取两排布边的距离,确定重叠度,也就是搭接宽度。
从图6中可以直观、清晰的识别出当前排体和下排体,以及当前位置的搭接宽度,判断搭接是否符合设计要求。
3.3 提取当前排体轨迹区域内的河床信息
虽然施工区域都有相应的水下地形图,但是水流的冲刷会时刻改变河床地形,抛枕位置的不准确也会形成不够平整的地形。在扫描得到的图像上,能够获取当前位置到排尾方向约30m范围内的水下地形信息,包括护岸坡度、沉排区域内的坑洼、暗沟、凸起、坡坎等。
在图7中,软体排边缘位置有一个4×5米,深度约1.5米的坑,在铺排过程中,该声呐图可以为施工人员提供参考,采取对应的措施,确保该区域软体排搭接宽度满足要求。
3.4 观察下排体边界的变化趋势
水下软体排的搭接情况,除了与当前排体的铺设有直接关系外,还与下排体的着床状态息息相关。从扫描得到的声呐图像上,还可以获取到下排体边界的状态,分析其是呈直线延伸,抑或是向上游或下游漂移、弯曲,从而预判搭接情况,为当前沉排提供参考。
上图8中,下排体边界呈弯曲状,向内凹缩,故当前排体铺设到该位置时,若未采取一定措施,则会导致该区域搭接宽度变小,可能会小于设计最小搭接宽度。通过该声呐图提取下排体边界的变化趋势,可以指导当前沉排维持原轨迹或作出适当调整[5]。
自2018年10月开始,水下沉排实时监控检测方法在长江中下游蕲春航道整治工程铺排施工中进行了运用,共完成铺排检测与监测面积为1009252 ㎡,施工方通过应用该水下沉排实时监控检测方法,获得水下铺排质量信息,为指导铺排作业施工,提高铺排施工质量提供了很好的技术支持。同时,在确保工程质量的前提下,节约了工程成本。
4 总结
三维图像声呐水下沉排实时监控技术能够实时检测水下软体排搭接宽度,提取当前排体轨迹区域的河床信息,观察下排体边界的变化趋势,获得更加直观、准确的检测数据,并能全面客观的反映水底工程状况,使业主和检测人员更加直观的掌握水下隐蔽工程质量状况。
目前该技术已成熟运用在长江中下游蕲春水道航道整治工程护底沉排施工控制中,解决了水下沉排实际沉排数据“可获取性”难题,实现了水下沉排施工中软体排的轨迹和搭接数据的准确采集。三维成像声呐可以进行全方位的扫描,不受水下能见度的影响,且能够获得高分辨率的点云图像。而且它是对一定区域内进行的全扫测,可以同时获取排体搭接宽度、水下地形情况等多方面的信息,对于控制水下排体排施工质量具有积极的意义,具有广阔的应用前景。
参考文献:
[1] 查文富,毕文焕等,三维成像声呐在水下沉船扫测中的应用[J].长江航运研究,2017(04):0-63;
[2] 時振伟,刘翔,张建峰,李腾等,三维成像声呐BV5000在水下测绘领域中的应用[J].气象水文海洋仪器,2013(3):6248-52;
[3] 杨志,王建中,范红霞等,三维全景成像声呐系统在水下细部结构检测中的应用[J].水电能源科学,2015,33(6):59-62 ;
[4] 吉同元,李鹏飞,徐亮,三维成像声呐在重力式码头工程中的应用[J].水运工程,2018(5):105-108;
[5] 黄建明 进港航道水下地形的空间监测分析[J].海洋测绘 2005(5):43-45
