基于GPR正演技术的路面含水空洞雷达检测图像解译技术研究
2020-12-23邱怀中
邱怀中
(湖北省交通运输厅汉十高速公路管理处 武汉 430051)
高速公路建成通车后,受交通量迅速增长、环境作用,以及承受车辆荷载的反复加载等影响,永久变形与内部损伤不断累积,沥青混合料在表面及内部都将出现不同形式的损伤,如典型空洞病害。同时,由于雨水渗入及基层水气向上扩散,在空洞处存在积水现象,且不易挥发[1]。相较于路表性能检测,沥青混合料路面内部隐藏含水空洞病害较难被检测出来,其主要原因有:①埋藏于路面结构内部的典型空洞病害难以被发现;②我国对公路路面空洞典型病害检测研究较少,主要的检测重心为路面使用性能检测。
探地雷达(ground penetrating radar,GPR)检测是一项用于浅层地质探测的新技术,具有高效、简便、分辨率高,以及无损的特点,且路面含水空洞与正常道路沥青混合料的相对介电常数相差较大,因此理论上可通过雷达检测图像定位、分析路面内部含水空洞[2]。而在实际应用过程中,由于没有明确路面含水空洞病害与探地雷达异常图像的对应关系,即典型空洞病害雷达检测特征图像,解译人员无法对道路路面雷达检测异常区域图像进行客观分析、评价,因此探地雷达技术在道路浅层结构探测中的应用难以获得理想效果。目前,国内外已有较为丰富的探地雷达实际应用的案例。例如,贾辉等[3]从实际检测资料出发,分析各类干扰源对道路内部病害雷达检测的影响。卢成明等[4]提出一种通过探地雷达检测道路内部隐形裂缝的方法,并在实际工程中取得了良好的应用效果。上述方法都是基于大量现场雷达检测数据、实地分析、经验总结所得出的结论,因此,对技术人员的经验、技术要求较高,无法广泛推广普及。为实现对路面含水空洞病害的精确定位、解译,解译人员必须事先了解各类典型含水空洞病害雷达检测特征图像,作为反演与解译基础的GPR图像正演模拟技术,是明确典型含水空洞病害雷达检测特征图像的重要技术方法。
GPR图像正演技术是一种通过计算机模拟电磁波在道路介质中传播过程的方法[5]。基于GPR图像正演模拟技术开展道路典型含水空洞病害结构正演模拟,明确路面含水空洞的探地雷达检测特征图像,这对于识别、定位、分析路面内部含水空洞病害具有较大的实际意义。
1 理论推导
探地雷达的工作原理是通过地质雷达的发射天线向地面发射高频电磁波(1~5×103MHz)。由于高频电磁波的反射强度、波形受道路路面沥青混合料的介电特性与几何形态影响,因此电磁波在向下传播过程中遇到存在相对介电常数差异的道路路面结构层及内部隐藏空洞病害就会发生反射,反射回的电磁波由接收天线接收[6]。接收天线接收反射回的电磁波信号,并通过控制系统将反射回的电磁波信号以反射波形图及雷达检测剖面图的形式呈现,其图像见图1、图2。

图1 单道反射波形图
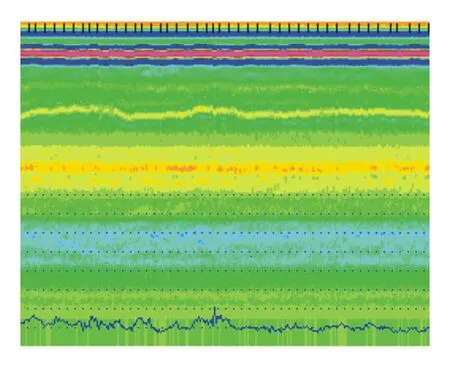
图2 现场雷达检测剖面图
因此,通过计算机模拟电磁波在三维含水空洞模型的传播过程,即可获取典型含水空洞的雷达检测特征图像。根据电磁波理论,高频电磁波在介质中的传播规律服从Maxwell方程组[7]。Maxwell方程组描述了磁场和电场相互激发、相互联系形成电磁场中的互相关系,结合介质的本构方程可推出式(1)。
(1)
式中:E为电场强度;H为磁感应强度;μ为磁导率。
本文将使用有限元法求解式(1),并假设网格区域有ND个节点,通过空间剖分将模型所有点构建为一个整体矩阵。
采用时域差分法递推每个时间步的场值,采用六面体计算区域进行结构化网格划分,虽然不能将模拟空间任意划分,但可以基本满足后文研究任务,最终可得式(2)。
(2)

在空间域中,本文已采用六面体剖分对模型空间进行离散求解。而在时间域,也要采用某种算法对时间域进行离散求解。为此将选取中心差分法进行求解,即将电场对时间域的一阶、二阶导数用中心差分表示,如式(3)所示。
(3)

因在0时刻及-Δt时刻激励源还未发射电磁波,此时所有节点电场为0。因此,可以计算出Δt时刻所有节点的电场值,计算方法如式(4)所示。
(4)
基于式(4)可依次递推电磁任何时间的电场值。基于此编写MATLAB代码,构建不同含水率的空洞病害三维模型,探求含水空洞的雷达检测特征图像。
2 数据采集
为使构建的模型更符合路面结构真实情况,采用真实路面检测数据构建模型。数据采集将分为以下2个部分:首先,通过雷达检测设备对汉十高速孝襄段进行全程雷达检测,获取道路纵向雷达检测二维剖面图像及所有检测点的单道反射波形数据;其次,于汉十高速孝襄段开展钻芯取样工作,测量面层芯样结构层厚度及沥青混合料相对介电常数等数据。
2.1 路面雷达检测
本次检测使用的是由武汉理工大学和美国农机大学联合开发的WB1-21型路用探地雷达检测设备。工作人员将WB1-21型路用探地雷达检测设备安装至检测车,在检测车行驶的过程中,设备由GPS定位系统控制每行驶0.5 m发射1次电磁波,并接受道路反射的回波,通过该设备获取京珠高速武汉段道路雷达检测数据。
2.2 现场钻芯取样及路面结构、材料参数测量
路面取芯作为传统的检测手段,钻取的芯样不仅可以进行病害、结构层完整性判断,还可以用于测量沥青混合料的相对介电常数、电导率等参数[8]。汉十高速路面结构厚度、相对介电常数是构建道路真实三维模型的重要参数。因此,通过直尺直接测量路面各结构层厚度,其测量结果见表1。再通过4308HTFP型同轴四探针介电常数测试仪测量芯样相对介电常数。
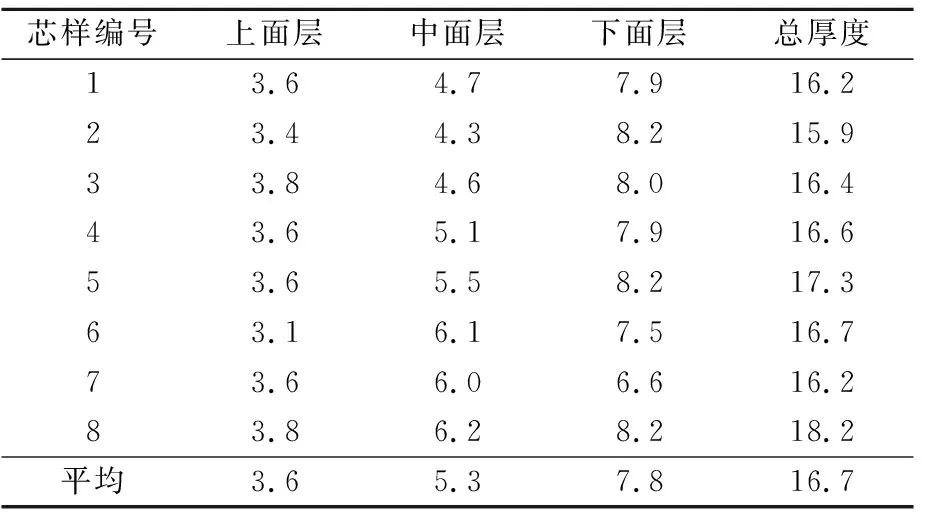
表1 芯样厚度 mm
本次试验样品为小尺寸的沥青混合料芯样,圆盘形状,其厚度约为10~15 mm,直径为30 mm。 为准确测量汉十高速路面上、中、下面层相对介电常数,使用切割具、钻芯机等设备制备8组芯样的上、中、下面层试验样品,每组芯样可制备上、中、下各4个试样,试样相对介电常数测量结果见图3。
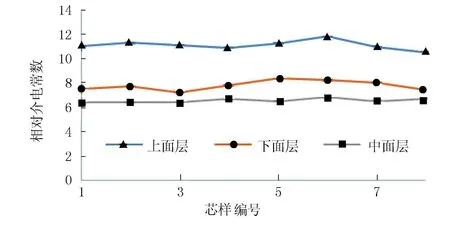
图3 相对介电常数测量图
由图3分析可知,汉十高速上、中、下各层芯样相对介电常数在一个较为稳定的范围内波动;上面层相对介电常数平均值为11.2;下面层相对介电常数平均值为7.8,下面层相对介电常数平均值为6.56。
3 基于真实路面三维模型的GPR图像正演分析
真实道路三维模型正演是构建典型含水空洞病害三维模型、确定典型病害雷达检测特征图像的首要步骤。所谓的真实道路三维模型正演便是模拟电磁波在结构完整、无损伤的道路路面结构的传播过程,模拟所得的雷达检测剖面图像可作为后文典型空洞模型正演结果的参照物。基于前文面层厚度、相对介电常数测量结果,构建真实道路三维模型,并将模型导入程序中。由于沥青混合料为非磁性材料,沥青混合料的磁导率为0[9]。汉十高速公路各项检测数据见表2。
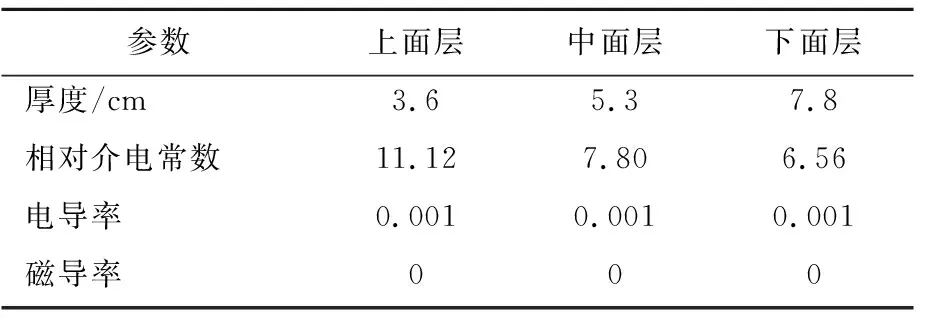
表2 汉十高速芯样测量数据
沥青混合料试件由沥青和集料拌和而成,在宏观上本文将道路沥青混合料视为均一介质,因此将模型中的每一种材料的性能参数视为定值。建立如图4所示的10 m×0.22 m×1 m三维道路模型,上部为空气层,厚度为3.3 cm,相对介电常数为1;第一层介质为上面层,厚度为3.6 cm,相对介电常数为11.12;第二介质为中面层,厚度为5.3 cm,相对介电常数7.80;第三层介质为下面层,厚度为7.8 cm,相对介电常数为6.56。整个区域被1 cm×0.1 cm×1 cm的矩形单元剖分为1 000×220×100的网格空间。
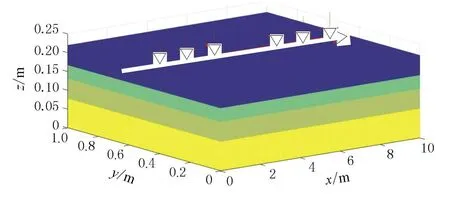
图4 真实道路三维模型
在实际汉十高速雷达检测过程中,雷达腔体中的发射天线根据GPS定位系统每0.5 m向道路方向发射1道电磁波,中心频率为1 GHz。与此同时,雷达接收天线与发射天线相距3 cm。基于雷达实际参数选取雷克子波作为雷达脉冲激励源,中心频率为1 GHz,采样时间间隔为0.01×10-9s,采样时窗长度为14×10-9s。发射天线和接收天线均处于地表0.043 m处,收发距离为0.03 cm。发射天线和接收天线从0.05 m处开始移动,每次同步移动0.5 m,记录20道波形。
将上述真实路面三维模型导入MATLAB计算程序中,将数值结果图像化处理,可得雷达二维检测图及单道反射波形图。图5为真实路面模型正演所得的单道反射波形图,由于道路真实三维模型为无损伤沥青混合料模型,因此激励源在每个发射、接收点计算所得的单道反射波形图皆如该图所示。图中A1为空气层与路表界面产生的反射波幅;A2为上面层与中面层交界面产生的反射波幅;A3为中面层与下面层交界面产生的反射波幅。
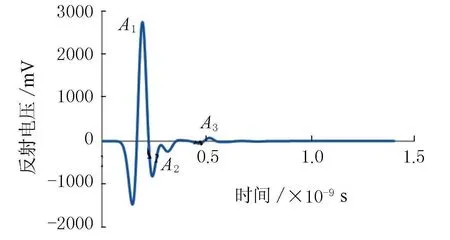
图5 单道反射波形图
图6为真实路面模型正演模拟所得的雷达检测剖面图,图像由20道单道反射波形图经MATLAB处理而成。
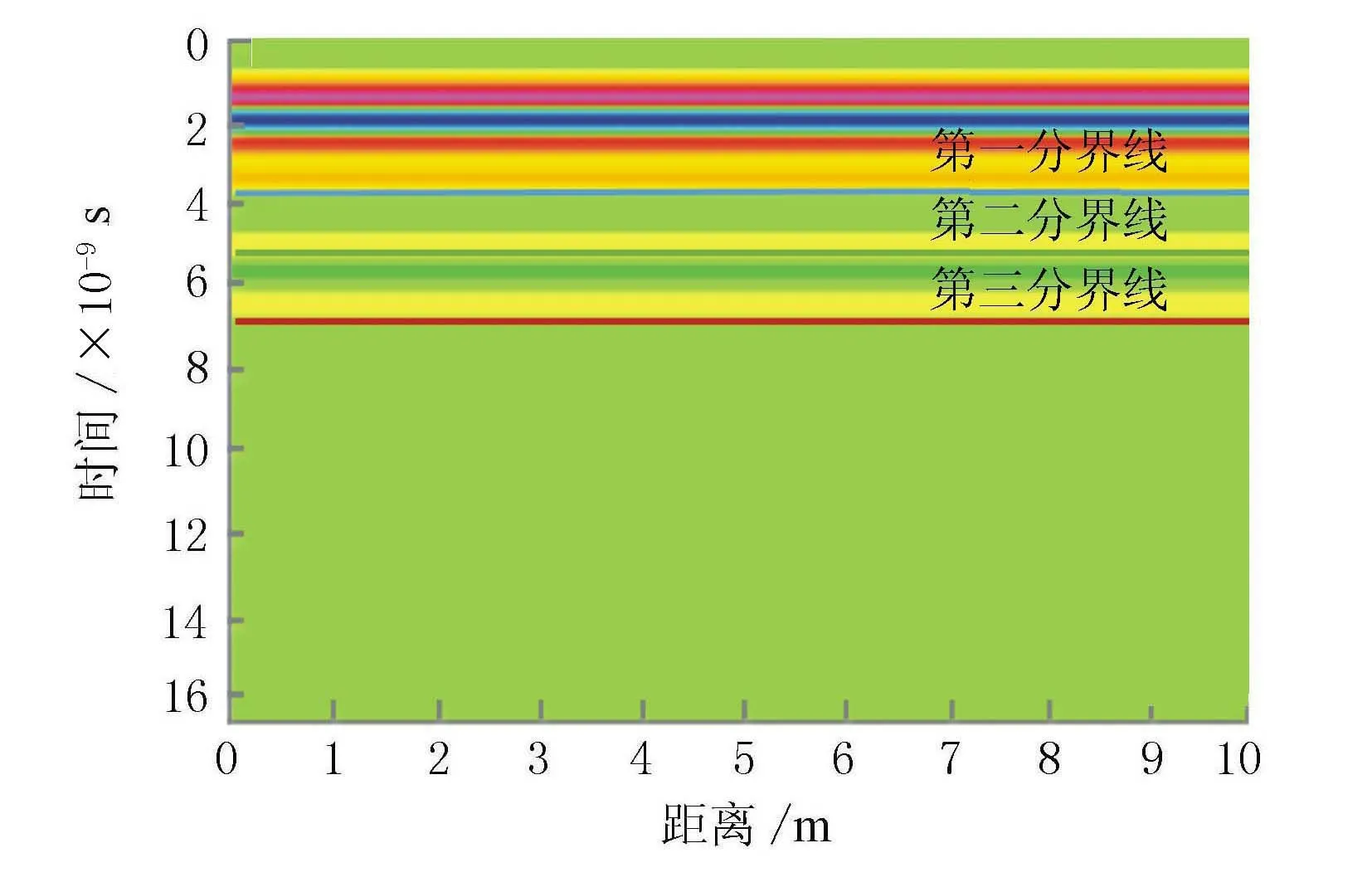
图6 无损伤道路雷达检测剖面图
由图6分析可知,正常道路检测所获得的二维剖面图层次分明。自上而下,第一道分界线雷达剖面中为空气层与路面上面层交界面;第二道分界线雷达剖面中为上面层与中面层交界面;第三道分界线雷达剖面中为中面层与下面层交界面。由于真实路面三维模型中各个结构层相对介电常数均一且无损伤,只有当穿越路面结构层交界面时,电磁波发生反射与折射,因此基于道路真实模型所得的雷达检测图像层次分明,能较好地反应路面真实结构状态。
4 基于三维含水空洞模型的GPR图像正演分析
表3为常见的路用材料相对介电常数,由于液态水与空气的介电特性存在较大差异,探地雷达发射的高频电磁波在两物质交界面发生反射、折射。高速公路典型空洞病害一般出现于层间结构交界处,其中下面层处空洞分布最多。本文为了提高空洞识别水平,减少其他因素对数值模拟的影响,假设空洞形状为规则长方体,长方体空洞长宽高分别为5 cm×5 cm×2 cm。含水空洞位于道路三维模型中、下面层交界面,其中心点空间坐标为(5 m,0.5 m,0.078 m)。

表3 常用路用材料介电常数范围
为获得典型含水空洞道路的雷达检测剖面图及典型单道反射波形图,本研究将建立不同含水率空洞模型,确定典型含水空洞检测剖面图。举例说明:为构建10%含水率空洞模型,本文修改代码,令空洞区域的下10%区域的相对介电常数为81(水),上90%区域的相对介电常数为1(空气)。基于该方法,选取6种不同含水率空洞模型,含水率分别为10%,20%,35%,50%,75%,100%。图7为不同含水率的三维空洞模型。
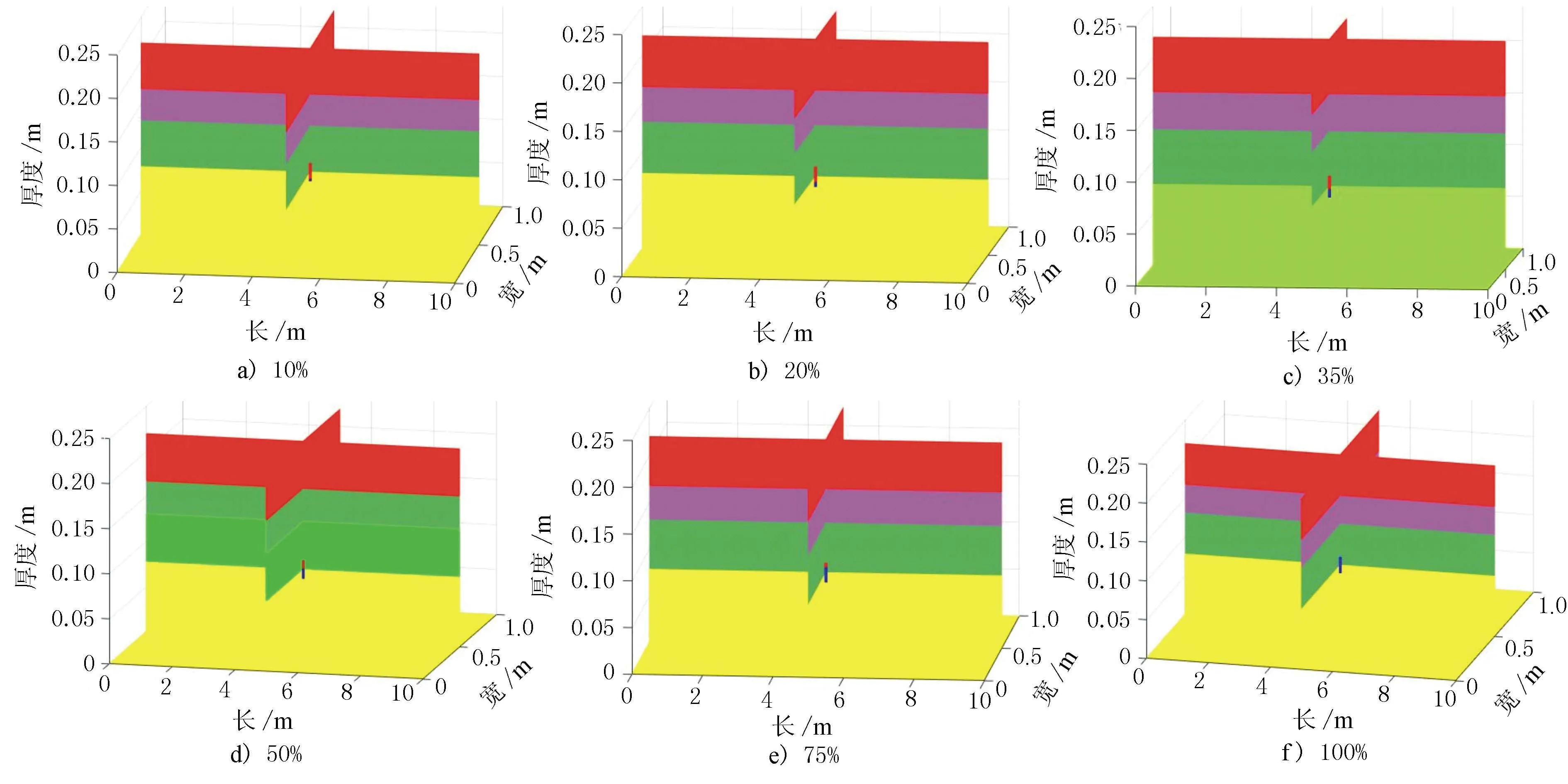
图7 不同含水率空洞三维模型
图8为不同含水率空洞模型模拟所得的雷达检测二维剖面图,图像由20道单道反射波形图经MATLAB处理而成,展示路面纵向二维形态。对于存在含水空洞的路面结构,得到的二维剖面图与正常道路的雷达检测二维剖面图的区别为:在中下面层反射界面出现“红+蓝+红”特征图像,蓝色部分将代表空洞中水的位置,红色部分代表空洞中上部的空气,通过“红+蓝”的位置准确定位空洞位置,与此同时随着空洞含水率的增加,下部分红色线条将不断远离中下面层反射界面。

图8 不同空洞含水率模型的雷达检测剖面图
基于本文数值模拟结果,可知典型含水空洞雷达检测图像具有以下特征:雷达二维检测剖面图中出现“红+蓝+红”特征图像,“红+蓝”的位置即含水空洞所在位置。
基于该典型特征,本文结合汉十高速实际雷达检测数据,发现汉十高速路面结构存在多次含水空洞典型病害。图9、图10为汉十高速孝襄段采用GPR得到的2处含水空洞病害典型病害雷达检测图像及雷达检测图像所对应桩号的现场照片图。
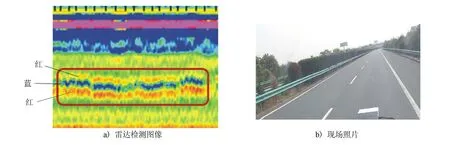
图9 K1221+328
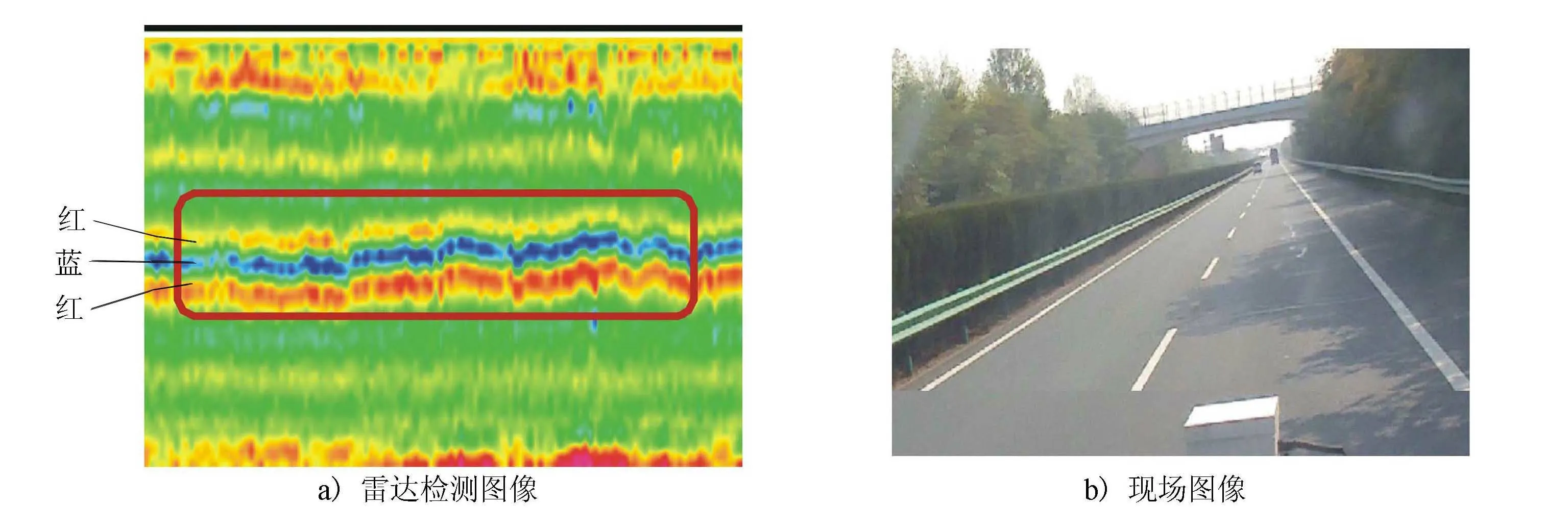
图10 K1218+678
通过图9、图10可以得到:“红+蓝+红”的条纹组合出现在基层与下面层交界处。因此,可推断空洞病害位于基层与面层黏结处。
5 结语
通过对典型道路含水空洞模型的雷达正演模拟,可获得典型空洞病害雷达检测特征图像。基于典型含水空洞病害雷达检测特征图像可以加深对GPR探测剖面的认识,提高解释精度。同时典型病害雷达检测特征图像是未来智能识别技术发展的基础。文中对不同含水率空洞模型展开正演分析,模拟电磁波在含水空洞模型中的传播规律,明确典型含水病害雷达检测特征图像,主要结论如下。
1) 含水空洞路面雷达检测二维剖面图与正常道路的雷达检测二维剖面图的区别为:在中下面层反射界面出现“红+蓝+红”特征图像,蓝色部分将代表空洞中水的位置,红色部分代表空洞中上部的空气,且随着空洞含水率的增加,下部分红色线条将不断远离中下面层反射界面。
2) 含水空洞路面雷达检测中心单道反射波形与正常道路的中心反射波形图的区别为:当空洞中含有液态水时,电磁波发生2次反射,其中第一道反射为沥青混合料与空气界面产生的反射波,第二道反射为空气与液态水交界面产生的反射波,波形表现为小幅度向下后产生大幅度上升。