面向SAR成像模拟的海面舰船场景模型构建研究综述*
2020-12-23
(海军航空大学岸防兵学院 烟台 264001)
1 引言
合成孔径雷达(Synthetic Aperture Radar,SAR)是雷达成像系统的一个重要的研究领域。利用合成孔径雷达成像技术研究海面舰船场景对舰船的探测识别具有重要意义。研究海面舰船场景SAR成像的一个重要课题就是SAR图像模拟研究。通过SAR图像模拟技术,可以在较短时间内获取大量任意参数条件下的SAR图像,有助于SAR图像的辅助解译,SAR图像处理算法的验证、SAR系统的分析设计与验证等[1]。
实际上舰船在海面的运动是一个复杂的过程,首先海面是一个不规则的时变粗糙面,舰船会在海面行进过程中进行不规律的摇摆,舰船运动过后海面还会出现尾迹等等,所以在对海面舰船进行SAR成像模拟时要考虑场景的构建问题来保证模拟图像的逼真性。因此本文在介绍海面舰船SAR成像模拟过程的基础上,重点讨论了海面舰船场景模型的构建问题,对舰船、海面、尾迹三方面场景进行专门论述,并对相关工作进行了总结与展望。
从20世纪50年代开始,SAR在遥感技术方面取得了长足的突破,并广泛应用到民用及军用领域,从20世纪80年代开始,经过三十多年国内外学者的共同努力,舰船及其海面背景SAR成像仿真技术正在不断的完善与成熟。因为海面舰船的SAR成像仿真技术具有一定的军事价值,所以公开发表的相关文献并不多,结合舰船、海面、尾迹等全要素场景的文章更是少之又少。从近三十年检索到的文献来看,单独考虑舰船、海面、尾迹的研究较多,成果较为丰富,也有部分文献考虑了舰船与海面、海面与尾迹两种要素的场景,没有检索到综合考虑舰船、海面、尾迹全要素场景的文献。基于此,以提高模拟图像的逼真度为目标,开展海面舰船场景模型构建研究显得十分必要。下面将简要介绍SAR成像模拟的两类经典方法并对包括舰船、海面、尾迹在内的全要素场景进行重点论述。
目前,国内外学者对海洋背景下SAR成像模拟研究的方法可以归纳为两类:基于SAR图像特征的模拟方法和基于回波信号的模拟方法[2]。基于SAR图像特征的模拟方法仅考虑海面舰船的几何模型和辐射模型来得到雷达后向散射系数,这种方法不考虑模型的回波信号,采取近似手段,运算效率高,实时性强,但未能反映SAR系统真实特征;基于回波信号的模拟方法考虑模型的回波信号,通过成像算法对回波信号进行处理,获得SAR模拟图像,该方法反映SAR系统真实特征,实时性强,但回波计算量较大。要想实现海面舰船SAR成像的精准模拟,关键问题在于全要素场景的构建,即构建舰船模型、海面模型、尾迹模型。

图1 基于SAR图像特征的模拟方法流程

图2 基于SAR回波信号的模拟方法流程
2 舰船模型构建研究现状
舰船三维模型的构建是获得高分辨率SAR模拟图像的重要环节,目前构建舰船三维模型大多采用3D MAX、CATIA等专业建模软件。而在建模方法方面基本可归纳旋转体法、部件分解法、面元法和参数表面建模法四种。而实际上对海面舰船进行SAR成像模拟时,舰船会受到来自海面上诸多因素形成的外力,对海面以及舰船的电磁散射特性造成一定的影响,所以构造海面舰船模型时需要考虑其运动状态,对舰船姿态不断进行调整并计算后向散射系数,从而获得更加精确、更加符合实际情况的SAR模拟图像。
目前国内外学者研究的重点也多在运动舰船模型上。研究者主要借助建模软件构建舰船模型,舰船在时变海面中会受到水动力学、风力作用以及舰船驱动作用从而进行六自由度运动调整。其中,纵荡、横荡、升沉是沿x轴、y轴、z轴的平动分量;横摇、纵摇、偏航是沿x轴、y轴、z轴的转动分量。通过引入旋转矩阵,使用转化后的坐标表示舰船在海面的运动情况。从目前检索到的文献来看,对运动舰船模型的研究要远远少于对静态舰船的研究。不过随着对模拟图像逼真度要求的提高以及计算机技术的不断进步,对运动舰船模型的研究逐步增多。
文献[3]基于切片理论,对舰船六个自由度的运动特性进行计算得到运动参数,利用逆向软件得到海面的实体模型,并与舰船进行组合,最后对舰船在特定海情下进行各个自由度的仿真;文献[4]建立了海面震荡舰船和摇摆舰船的SAR成像几何模型,推导分析了回波信号特点;文献[5]使用MOCEM·V4软件模拟舰船和动态海面组成的海洋场景雷达原始数据,得益于GPU计算,使得在模拟SAR和ISAR原始数据时能够考虑舰船运动;文献[6]提出模拟海面运动舰船SAR原始数据时考虑时变海面和运动舰船。海面SAR原始数据考虑动力学和时变反射函数,舰船原始数据考虑舰船六自由度运动及其在海面的平移;文献[7]结合舰船六自由度运动模型、时变海面复反射系数模型,对海面舰船目标SAR回波信号进行了建模仿真,体现了舰船目标自身散射和海面与舰船间的耦合散射,考虑了SAR平台与海面舰船目标的运动,较真实地反映了动态海面目标的电磁散射特性;文献[8]建立了动态海面驱动下舰船运动的水动力模型。通过模拟随海情、航速和航向角变化的舰船运动姿态,形成了时变海面舰船目标动态雷达特征信号仿真模型;文献[9]将舰船运动过程分为平动和转动两部分进行分析,通过横滚、俯仰、偏航的旋转矩阵,将目标固定参考坐标系转换到投影坐标系,进而分析舰船在三维不同转动的情况下的运动特征;文献[10]提出一种有效的双叠加模型来生成二维海面,基于该模型与四路径模型研究了舰船位于动态海面场景中的SAR成像;文献[11]结合舰船的六自由度运动模型、海面复反射系数模型、目标电磁散射模型,利用高频电磁散射计算方法和目标与舰船间的多路径散射,提出一种海面舰船目标合成孔径雷达回波信号仿真方法,建立了海面舰船目标SAR回波信号模型;文献[12]提出一种基于电磁散射计算的微动目标SAR回波仿真方法,该方法能够实现指定雷达视角和电磁参数条件下的微动复杂目标SAR回波仿真与图像模拟。
3 海面模型构建研究现状
海面状况会受到风力、地形摩擦力、船只航行等情况造成不规律的波动。目前学者对海浪的建模主要集中在以下五种方法:基于几何模型的建模方法;基于流体力学的建模方法;基于动力模型的建模方法;基于海浪谱的建模方法和基于分形理论的建模方法。同样在对海面进行建模时我们不得不考虑海面的波动情况来提高模拟的逼真性。动态的海面模型可分为线性模型与非线性模型。线性海面的建模一般采用线性叠加法和线性过滤法。这两种线性的建模方法都是由不同相位不同参数的余弦波叠加而成。线性叠加法,是由不同周期、不同频率、不同相位的余弦波叠加而成,通过改变相位、频率的值就可以得到不同时刻、不同条件下的海面模型;线性滤波法,又叫蒙特卡罗方法,是基于快速傅里叶变换(FFT),对白噪声进行傅里叶变换,在频率域内用海面谱进行滤波,最后再作傅里叶逆变换模拟出海面的起伏高度。
要想实现精准海面的建模必须考虑非线性因素,Creamer模型是在重力波的基础上推出一种“改进的线性模型”,该理论是在海面起伏的频域加入扰动项,产生非线性效果;还有一种非线性模型是Choppy Wave Model(CWM)模型,该模型海浪之间的非线性作用是基于流体力学方程通过考虑相位扰动来实现的。在线性滤波法的基础上对线性海面的高度起伏函数进行希尔伯特变换。
文献[15]通过将拉格朗日关于运动的海的初始解进行线性叠加并结合海谱构造出二维时变海面;文献[16]在海面建模过程中考虑卷浪因素,在已有Longtank卷浪几何建模方法下进行分析并加以改进,考虑时间和风速因素并加入小粗糙度扰动,建立了二维改进时变粗糙卷浪模型和叠加卷浪模型,将相同风速下的PM海面模型与卷浪模型结合,建立了三种含卷浪时变海面几何模型;文献[17]利用分形导体粗糙面模型,结合基尔霍夫近似法,对动态海面回波数据进行成像,得到符合统计学特征的海面场景SAR模拟图像;文献[18]结合海浪谱的统计特性,根据动态海浪理论构建了基于海浪谱的双尺度海面模型,同时考虑了大、小尺度海面因素的影响,对不同风速、风向、极化条件下的随机海面进行了SAR成像模拟,通过比对分析,得到一些结论;文献[19]介绍了一个用于模拟L波段GNSS海面反射信号极化特性的程序,利用一个能反映不同海情的时变3D海面和采用物理光学法的基尔霍夫近似来描述海面散射机制;文献[20]介绍了GRECOSAR采用动态多谐波海面高度模型的SAR模拟图像并进行验证,对C、X波段SAR传感器进行了模拟,将同极化通道结果与K、对数正态、韦伯尔和瑞利分布进行了对比,能够用来描述真实海面SAR图像的统计特征;文献[21]根据分形海面数据,基于基尔霍夫近似的电磁散射模型以及基于时域的动态场景原始信号模拟过程对海洋场景的天基SAR原始信号进行了模拟;文献[22]根据SAR分辨尺度以及海面的散射特性近似把海面分成大尺度和小尺度两种波,建立起海面散射的两尺度复合模型;文献[23]将分形用于动态分形海面;文献[24]针对粗糙海面的非线性和自相似性特点,建立改进二维分形模型,描述了表面谱与空间波数之间的正幂率和负幂率关系,实现了对粗糙海面的模拟。
4 尾迹模型构建研究现状
当舰船处在运动状态时,舰船运动过的水面就会留下痕迹,并会保持在一个较长时间范围内,容易被获取为SAR图像,因此,对舰船尾迹的研究,会对舰船的识别、探测、追踪、监视等起到有用的帮助。目前国内外学者将舰船尾迹分为四类:Kelvin尾迹、窄V尾迹、湍流尾迹、内波尾迹。表1是四类尾迹的产生机理及物理特征。
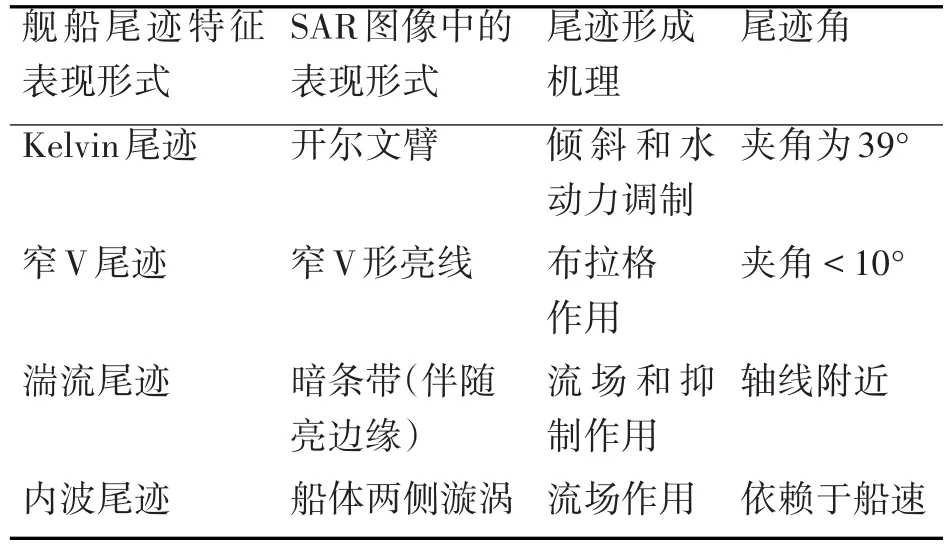
表1 舰船尾迹表现形式及物理特征
文献[25]研究了由泡沫组成的湍流尾迹的体散射模型,利用辐射输运理论和蒙特卡罗方法建立了湍流尾迹的体散射模型;并基于内波尾迹粗糙度较小的特点,重点研究了低海况下下内波尾迹的电磁散射特性;文献[26]对不同船速、不同吃水深度等条件对Kelvin尾迹水动力模型进行研究,仿真出了不同条件下Kelvin尾迹模拟图并结合海表面波模型和雷达后向散射模型仿真出不同船速、不同吃水深度条件下Kelvin尾迹SAR图像;文献[27]利用点源扰动模型建立舰船Kelvin尾迹模型,模拟出不同船速条件下的舰船尾迹;文献[28]引入快速傅里叶变换快速求解海面,加入波流相互作用,使海面与尾迹较真实融合在一起,基于随机多尺度模型给出舰船尾迹后向散射简化计算模型,结合速度聚束和调制变换函数仿真出SAR图像;文献[29]介绍了L波段表面舰船尾迹SAR图像的计算机模拟并对结果进行了分析。Kelvin波的起伏改变了本地入射角,因此模拟结合了海面和尾迹的高度和斜率。模拟结果依赖于舰船和SAR参数以及观测几何。文献[30]根据海水密度的变化,利用离散内波层和扩散内波层描述了海水分层现象,进一步推导出满足内波尾迹的色散关系和波峰关系,进而对内波尾迹的速度场进行了研究,利用了频域分解技术对内波尾迹的波高场进行了反演;文献[31]提出船尾迹多视向的成像仿真技术,并首次在二维空间中从不同视向仿真船尾迹SAR图像;文献[32]基于水动力理论和波流弱相互作用理论,运用波作用量谱平衡方程研究了潜航体的尾流场与表面波作用后的表面尾迹。
5 结语
海面舰船SAR成像模拟研究技术日臻成熟,舰船及海面模型越来越精细、电磁散射模型也越来越合理,模拟图像的逼真度也逐步提高。本文对海面舰船全动态场景SAR成像模拟研究进行了综述。首先从逼真性要求提出了进行全要素场景研究的必要性,随后简要概述了SAR成像模拟的两种经典方法,重点对包括舰船、海面、尾迹场景在内的全要素场景的模型构建进行了专门综述,目前考虑全要素场景模型的研究尚属空白,不过对单独场景模型的研究较多,成果较为丰富,足以支撑此项工作的开展。
下一步,应开展如下方面工作进一步研究海面舰船成像模拟:
1)模型的逼真性精度方面:进一步研究场景的建模方法,对舰船外形进行合理优化,对海面及尾迹模型进行精度提升,以期更加贴近真实场景。
2)模型的简洁性方面:考虑全场景对海面舰船进行SAR成像模拟不可避免造成数据量大、模拟耗时长等问题。在不影响仿真结果的前提下,对各个场景进行合理简化处理,尽可能减少计算的数据量。
3)大场景下海面舰船的成像模拟。实际情况下舰船都是编队出行,研究大场景下海面舰船的成像模拟符合实际要求。
