某型直升机座舱低频振动现象分析及改善
2020-12-23沈安澜侯宝红
沈安澜,侯宝红,江 安
(1.中国直升机设计研究所,江西 景德镇 333001;2.解放军66350部队,河北 保定 071000)
0 引言
某型直升机在外场飞行过程中,飞行员反映在特定飞行状态下,座舱出现低频振动现象,影响飞行任务的执行。现象描述为:在特定飞行状态下,机身出现异常的低频振动,飞行员反映有类似骑马的直观感受。
直升机由于其独特的构型和飞行方式,振动问题一直是困扰其发展的重要问题。直升机旋转部件多,所处的气动环境恶劣,造成直升机振动复杂,频率成分多而且频率跨度大。这在一定上给直升机振动问题的分析和解决带来了困难。国外某些直升机型号[1,2]如NH90、EH101、AH-64D以及“科曼奇”,在试飞初期也都曾出现过类似“Tail shake/Buffet”低频振动问题;国内有关型号[3,4]加装测试设备后在试飞过程中也多次出现过低频振动问题。
本文通过飞行振动数据分析,利用频谱结合滤波分析的方法,确定了该座舱低频振动现象的主要原因为旋翼二阶通过频率(2kΩ)和尾桨一阶通过频率(kΩt)在座舱处合成,形成拍频现象。分析了拍频的形成机理,给出了拍频振动典型频谱图,提出了相应的改善建议,经外场试飞验证,可在一定程度上改善座舱低频(拍频)振动。
1 原因分析
直升机的振源[3,5,6]一般为旋翼、尾桨、发动机及传动系统等旋转部件引起的周期激励和气动环境中的随机激励。相应地,座舱内的主要激励频率为旋翼的转速频率1Ω和一阶通过频率kΩ,尾桨的转速频率1Ωt和一阶通过频率kΩt以及传动轴的转速频率等。
直升机低频振动与上述频率激励下的振动现象有显著区别。直升机低频振动大多表现为抖动、晃动、筛动等现象[3],依据低频振动的频率不同,飞行员会有类似骑马或坐船等直观感受,方向多为垂向或侧向。
1.1 振动数据分析
直升机属于多振源系统,包含旋翼、尾桨、传动系统、发动机等多个振源,各个振源之间的激励频率各不相同,因此主要利用频谱分析进行常规直升机振动分析。
针对直升机低频振动飞行状态进行70Hz以内的频谱分析。如图1所示,该机座舱测点在10Hz以内仅有一个1Hz左右的频率成分较为明显。但根据飞行员反映的振动感觉和振动传感器频率测试范围,同时对比其余正常状态下的频谱图(图2所示)进行综合分析判断,1Hz以内的频率应是系统测试误差带来的。
根据图1所示,除1Hz外,座舱其余频率下的振动水平均处于正常范围内,因此飞行员不会感觉较大的低频振动。对比图1和图2,进一步分析发现,座舱出现低频振动时,座舱垂向通道旋翼二阶通过频率(2kΩ)振幅约为0.06g,尾桨一阶通过频率(kΩt)振幅约为0.06g,旋翼2kΩ和尾桨kΩt频率相近。根据拍频的形成机理,飞行员反映的座舱低频振动预测为旋翼2kΩ和尾桨kΩt频率合成拍频导致的。

图1 低频振动状态下的频谱图
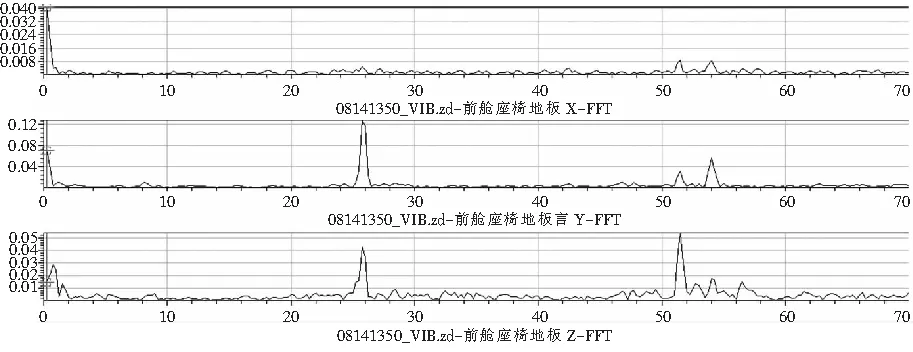
图2 其余正常状态下的频谱图
1.2 拍频现象及机理
拍频振动现象常出现在回转机械振动中,一方面可能是由于转子中残存的介质和转子本身的失衡现象共同引起;另一方面可能是系统中一个或多个稳态振源的频率振幅近似于另一个振源频率振幅而引起的一种特殊的振动现象[7-9]。
为分析拍频现象机理[3,7-9],假设存在两个简谐振动:
u1=A1sin(ω1t+φ1)
(1)
u2=A2sin(ω2t+φ2)
(2)
通过三角函数合成后,其合成振动可以写成:
u(t)=u1(t)+u2(t)
(3)
其中:

(4)

(5)
式中,A1,A2,ω1,ω2分别为两个简谐振动的振幅和频率,当这两个简谐振动的频率和振幅相等或相近时,根据式(5)所示,u2(t)等于或约等于0,此时合成振动u(t)即为“拍”,是一种频率为(ω1+ω2)/2的变幅振动,其振幅按余弦函数以频率(ω1-ω2)/2变化,是一种典型的幅值调制过程,实际呈现出的是幅值调制函数的特性,如图3所示。人体实际感受到的应为该合成振动的外包络,振动周期应为合成振动周期的一半,因此人体感受到的频率其实应该为(ω1-ω2)。

图3 典型拍频现象
因为ω1与ω2非常接近时,合成后形成的(ω1-ω2)/2频率很低,周期会较长,当此时幅值A1与A2相当或相等。由式(4)可知,合成后的u(t),其振动幅值会在(A1+A2)到0之间以圆频率做周期波动,此时人体感受到明显的振动起伏。当A1与A2相差较大,其合成后的振动幅值以两个简谐振动中的振幅较大的简谐振动振幅为主,即当A1远大于A2时,其合成后的振动振幅约为A1,此时人体感受不到明显的振动起伏。
1.3 座舱低频振动原因分析
拍频现象是一种特殊的振动现象,在各类旋转机械振动中均出现过,例如各类压缩机[7]、客车[9]以及直升机[3]等包含旋转机械的系统,但针对拍频的分析和故障源识别方法又有所差别:赵晴等[7]主要采用观察有关测点频谱图的特点,逐一排除其他原因,确定低频项为压缩机的拍频的方法;郭彬等[9]主要利用频谱分析法和分别运转法来确定振动源和振动频率;王文涛等[3]则主要基于希尔伯特变换进行直升机拍频振动分析;刘建礼等[4]则利用带通滤波的方法进行直升机低频振动分析。
为了进一步确认该直升机低频振动的原因,同时更为直观地判断旋翼2kΩ和尾桨kΩt频率是否合成形成拍频,在1.1节振动数据分析的基础上,利用带通滤波[4]方法,得到旋翼2kΩ和尾桨kΩt频率合成后的时域曲线图,如图4所示。通过对比图1、图3和图4,进一步确定了该架机在飞行员反映低频振动的飞行状态下存在拍频现象。综合1.1节的分析结果,确定了该架机座舱低频振动的原因为:座舱内两个相近频率旋翼2kΩ和尾桨kΩt频率在特定飞行状态下振幅相等,导致这两个频率合成出现拍频现象,同时飞行员感受到明显的低频振动。

图4 低频振动状态下带通滤波时域图
2 改善建议及飞行验证
通过飞行振动数据分析结果,确定了该架机出现座舱低频振动的原因,针对座舱低频振动的原因和拍频形成机理,给出如下的改善建议和措施:
1) 增大旋翼2kΩ和尾桨kΩt频率的频率差:更改旋翼2kΩ或更改尾桨kΩt频率;
2) 增大座舱旋翼2kΩ和尾桨kΩt频率下的振幅差,改变驾驶舱内两频率的振幅:调整旋翼锥体和动平衡,同时调整尾桨动平衡,必要时可以尝试更换尾桨叶;
3) 由于座舱拍频现象与座舱的旋翼2kΩ和尾桨kΩt频率下的振幅相关,而旋翼2kΩ和尾桨kΩt频率下的振幅与飞行状态相关,因此当座舱出现低频振动(拍频),可以尝试改出当前飞行状态进行改善。
更改直升机旋翼2kΩ和尾桨kΩt频率,涉及到旋翼系统、发动机和尾桨等一系列系统参数的更改,涉及的系统较多而且有可能会影响全机主要性能指标,所以目前不具备更改条件。因此只能考虑对座舱旋翼2kΩ和尾桨kΩt频率的振幅进行改善从而改善座舱低频(拍频)振动。
通过试飞验证,飞行员反馈结果表明第2条和第3条措施均有效,具体为:①当座舱出现低频振动(拍频)时,飞行员改出当前飞行状态,低频(拍频)振动现象消失;②对旋翼锥体和动平衡以及尾桨动平衡进行调整后,在特定飞行状态下低频(拍频)振动现象仍存在,但振动感受(振幅)有所改善。
3 结论
为了改善某型直升机座舱低频振动现象,通过飞行振动数据分析,确定了该问题原因,并通过分析该现象的形成机理,给出了相应的改善建议,并经过了实际飞行验证,得出如下结论:
1)该架机座舱低频振动现象是一种典型的拍频现象,是由于在特定飞行状态下座舱内旋翼2kΩ和尾桨kΩt频率两个相近频率振幅相同或相近引起的;
2)旋翼2kΩ和尾桨kΩt频率在座舱内的振幅一般都较小,在进行飞行振动分析时容易被忽略,因此在后续振动分析时需要对旋翼2kΩ和尾桨kΩt频率引起的拍频现象予以关注;
3)拍频现象是一种特殊的振动现象,由于直升机振源多,频率成分多,其振动问题较为复杂,因此在进行振动分析时,需要仔细区分拍频振动现象与其他低频振动现象;
4)本文分析了拍频的形成机理,提出了相应的改善建议和措施,经实际飞行验证,能够在一定程度上改善座舱振动,为后续外场直升机低频振动分析和解决提供了思路。