未知时变扰动下的车轮滑移率鲁棒非线性跟踪控制
2020-12-22张家旭周时莹周洪亮
张家旭 周时莹 周洪亮 赵 健 朱 冰
(1吉林大学汽车仿真与控制国家重点实验室, 长春 130022)(2中国第一汽车集团有限公司智能网联开发院, 长春 130011)(3哈尔滨工业大学航天学院, 哈尔滨 150001)
自动驾驶电动汽车是解决城市交通拥堵问题和环境问题的重要手段之一,而连续、快速、稳定的车轮滑移率跟踪控制是自动驾驶电动汽车实现产业化的重要基础.因此,开发连续、快速、稳定的车轮滑移率跟踪控制策略对于加速自动驾驶电动汽车产业化具有重要的意义[1-2].
传统的车轮滑移率跟踪控制通常以提高汽车的制动稳定性和最小化汽车的制动距离为控制目标,基于逻辑切换规则的控制方式将车轮滑移率控制在轮胎-地面附着系数峰值点对应的目标滑移率附近.文献[3]基于车轮制动力矩、滑移率和角加速度等信息设计逻辑切换规则,将轮胎-地面附着系数控制在其峰值附近.文献[4]基于车轮角加速度信息设计逻辑切换规则,使轮胎-地面附着系数在其峰值点附近形成稳定的极限环.文献[5]采用车轮制动力矩和滑移率的若干门限值作为切换条件,并从系统稳定性角度给出了门限值的约束条件.文献[6]采用优化方法实现制动系统切换规则的自动调整,提高标定效率.上述基于逻辑切换规则的控制方式难以实现对任意目标滑移率高精度的跟踪控制,无法满足自动驾驶电动汽车的需求.
相对于基于逻辑切换规则的控制方式,基于动态模型的控制方式更容易实现连续、快速、稳定的目标滑移率的跟踪控制,适用于自动驾驶电动汽车的需求.文献[7]提出一种全状态反馈的车轮滑移率跟踪控制策略.文献[8]建立线性时变参数控制模型,并采用线性二次最优控制方法设计车轮滑移率跟踪控制器.文献[9]采用反馈线性化思想设计出一种车轮滑移率自适应跟踪控制策略.文献[10]提出一种车轮滑移率二阶滑模跟踪控制策略.文献[11]提出一种车轮滑移率最优跟踪控制策略.文献[12]针对不同的地面附着条件,基于LuGre轮胎模型和回馈递推控制方法设计车轮滑移率跟踪控制器.文献[13]提出一种干扰自补偿车轮滑移率跟踪控制策略.上述基于动态模型的控制方式通常面临控制模型无法精确表征车轮滑移率动态而导致所设计的车轮滑移率跟踪闭环系统失稳.因此,设计具有强鲁棒性、快速性和高精度的车轮滑移率跟踪控制策略具有重要的实用价值.
本文针对自动驾驶电动汽车对车轮滑移率跟踪控制的需求,提出一种对未知时变扰动具有强鲁棒性的车轮滑移率非线性跟踪控制策略.基于Burckhardt轮胎模型建立车轮滑移率跟踪控制模型,并基于此设计出可在线估计和补偿未知时变扰动的非线性干扰观测器.同时,利用设计出具有有限时间收敛特性的车轮滑移率鲁棒非线性跟踪控制律,并给出闭环系统平衡点有限时间稳定的严密证明.最后,结合车辆动力学仿真软件对所提出策略进行仿真验证.
1 数学模型建立
车轮滑移率跟踪控制模型是控制策略设计基础,但过于复杂的车轮滑移率跟踪控制模型易导致对系统不确定性具有高灵敏度的控制策略.图1为车轮滑移率动态,图中Fx为轮胎纵向力,Fz为车轮垂向载荷,Tb为车轮制动力矩,ω为车轮角速度,v为车速.基于图1所示的车轮滑移率动态建立关于车轮角速度和车速的动力学方程为
(1)
式中,J为车轮转动惯量;r为车轮有效滚动半径;m为1/4整车质量.

图1 车轮滑移率动态
为了使基于车轮滑移率跟踪控制模型设计的控制策略简单有效,采用结构简洁、参数较少的Burckhardt轮胎模型描述轮胎纵向力为
Fx=Fzμ(λ)
(2)
式中,μ(λ)为轮胎-地面附着系数,可表示为[14]
μ(λ)=θ1(1-e-λθ2)-λθ3
(3)
式中,θ1、θ2和θ3为模型参数;λ表示制动工况下车轮滑移率,即
(4)
对式(4)求二阶导数,可得
(5)
对式(1)求一阶导数并将其代入式(5),可得
(6)

(7)

2 非线性干扰观测器设计

(8)

定义李雅普诺夫候选函数为
(9)
对式(9)求导,可得
(10)
(11)
将不等式(11)代入式(10),可得
(12)
由李雅普诺夫稳定性理论可知,式(8)描述的非线性干扰观测器估计误差将在有限时间内收敛到区域D,即
式中,ξ>0.
由式(13)可知,参数L1越大,观测器估计精度越高.同时,观测器估计误差的有限时间收敛特性是其独立于控制律设计的基础.
利用非线性干扰观测器的估计输出设计车轮滑移率跟踪前馈补偿控制量,由此可将式(7)中包含的控制变量表示为
(14)
式中,u1为车轮滑移率跟踪反馈控制量.
由式(14)可知,将非线性干扰观测器的估计输出作为车轮滑移率跟踪前馈控制量可以有效减小车轮滑移率跟踪反馈控制量的负担.将式(14)代入式(7),可得
(15)
3 快速终端滑模控制律设计
考虑式(15)描述的车轮滑移率跟踪控制模型,本节基于有限时间和快速终端滑模控制理论设计车轮滑移率鲁棒非线性跟踪控制律.为此,采用下式描述的非奇异快速终端滑模面定义系统滑模特性:
σ=x1+κ1|x1|αsgn(x1)+κ2|x2|βsgn(x2)
(16)
式中,κ1>0、κ2>0、1<β<2和α>β为设计参数.
由文献[16]可知,非奇异快速终端滑模面上的状态轨迹将在有限时间收敛到系统的平衡点.因此,下面设计车轮滑移率跟踪快速终端滑模控制律,使任意初始位置的系统状态轨迹在有限时间收敛到式(16)描述的非奇异快速终端滑模面上,进而得到如下定理.
定理1考虑式(15)描述的车轮滑移率跟踪控制模型,设计如下车轮滑移率鲁棒非线性跟踪控制律:

(17)
式中,κ3>0、κ4>0、η1>1和0<η2<1为设计参数.则由式(17)描述的车轮滑移率鲁棒非线性跟踪控制律形成的车轮滑移率跟踪闭环系统的平衡原点是有限时间稳定的.
证明定义李雅普诺夫候选函数为
(18)
对式(18)描述的李雅普诺夫候选函数进行求导,可得
(19)
对式(16)描述的非奇异快速终端滑模面进行求导,可得

(1+κ1α|x1|α-1)x2+κ2β|x2|β-1(f(x)+
(20)
将式(20)代入式(19),可得

(21)
将式(17)描述的车轮滑移率鲁棒非线性跟踪控制律代入式(21),可得
κ3|σ|η1+1-κ4|σ|η2+1
(22)

(23)
由设计参数η1>1和0<η2<1可知,当式(18)描述的李雅普诺夫候选函数V2>1时,式(23)可简化为
(24)
由比较引理可知[17],满足不等式(24)约束的李雅普诺夫候选函数将在有限时间内收敛至V2=1,且到达时间满足
(25)
式中,V2(0)为李雅普诺夫候选函数初始值;T1为李雅普诺夫候选函数由初始值V2(0)收敛到V2=1所需的时间.
当李雅普诺夫候选函数V2≤1时,式(23)可简化为
(26)
由比较引理可知[17],满足不等式(26)约束的李雅普诺夫候选函数将在有限时间内收敛至V2=0,且到达时间满足
(27)
式中,T2为李雅普诺夫候选函数由V2=1收敛到V2=0所需的时间.
因此,任意初始位置的系统状态轨迹将在有限时间收敛至式(16)描述的非奇异快速终端滑模面上.再结合式(16)描述的非奇异快速终端滑模面的性质可知,闭环系统的平衡点是有限时间稳定的.证毕.
4 仿真分析
本节对所提出的车轮滑移率鲁棒非线性跟踪控制策略进行仿真验证,并以车辆左前轮滑移率仿真结果为例,与基于传统滑模控制方法设计的车轮滑移率跟踪控制策略进行对比分析[18].车轮滑移率鲁棒非线性跟踪控制策略参数设置为:L1=12,κ1=350,κ2=200,κ3=500,κ4=300,α=3.5,β=1.2,η1=3,η2=1.6,ρ1=ρ2=100,ρ3=200.仿真车辆主要参数设置为:m=1 416 kg,J=0.9 kg·m2,r=0.31 m.
4.1 阶跃递增信号仿真工况
在阶跃递增信号仿真工况中,车速初始值设置为33.34 m/s,变速器档位设置为空挡,阶跃递增信号的幅值分别设置为0.05和0.1.仿真结果如图2所示.
图2(a)~(e)分别为阶跃递增信号仿真工况的车速与轮速、车轮滑移率、车轮滑移率跟踪误差、轮胎-地面附着系数随车轮滑移率变化历程和车轮制动力矩.由图2(a)~(d)可知,基于传统滑模控制方法设计的控制策略与本文提出的控制策略均可以快速、稳定地跟踪阶跃递增信号,并且可以使轮胎-地面附着系数由一种稳态状态平稳过渡到另一种稳态状态,但本文提出的控制策略具有更高的跟踪精度和更快的响应速度.由图2(e)可知,基于传统滑模控制方法设计的控制策略存在抖振现象,影响汽车制动性能,而本文提出的控制策略可以有效抑制抖振现象.相对于基于传统滑模控制方法设计的控制策略的最大车轮滑移率跟踪残差0.62%,本文提出的控制策略的最大车轮滑移率跟踪残差仅为0.32%,满足自动驾驶电动汽车的需求.
4.2 斜坡信号仿真工况
在斜坡信号仿真工况中,车速初始值设置为33.34 m/s,变速器档位设置为空挡,斜坡信号的幅值设置为0.1,斜坡信号的变化速率设置为0.1.仿真结果如图3所示.
图3(a)~(e)分别为斜坡信号仿真工况的车速与轮速、车轮滑移率、车轮滑移率跟踪误差、轮胎-地面附着系数随车轮滑移率变化历程和车轮制动力矩.由图3(a)~(c)可知,2种控制策略均可以快速、稳定地跟踪斜坡信号,但基于传统滑模控制方法设计的控制策略在2.3~2.5 s期间围绕目标值存在较大的波动现象,此波动现象导致图3(d)所示的轮胎-地面附着系数也产生波动现象,降低了制动平顺性,而本文提出的控制策略在整个时间历程均具有更高的跟踪精度和更快的响应速度.由图3(e)可知,基于传统滑模控制方法设计的控制策略存在抖振现象,影响汽车制动性能,而本文提出的控制策略可以有效抑制抖振现象.同时,相对于基于传统滑模控制方法设计的控制策略的最大车轮滑移率跟踪残差0.085%,本文提出的控制策略的最大车轮滑移率跟踪残差仅为0.042%,满足自动驾驶电动汽车的需求.

(a) 车速和轮速

(d) 轮胎-地面附着系数随车轮滑移率变化历程
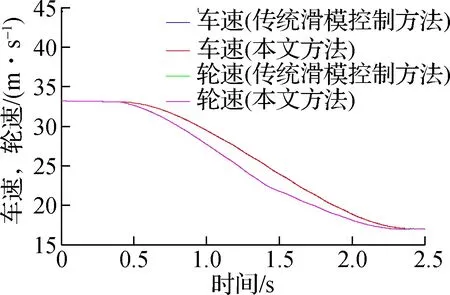
(a) 车速和轮速
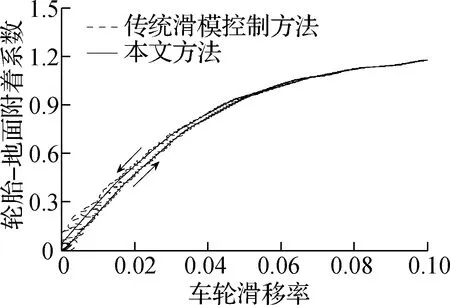
(d) 轮胎-地面附着系数随车轮滑移率变化历程
5 结论
1) 建立了车轮滑移率跟踪控制模型,并且设计了非线性干扰观测器,在线估计和补偿未知时变扰动,提高了系统的鲁棒性和降低了设计的保守性.同时,利用设计出具有有限时间收敛特性的车轮滑移率鲁棒非线性跟踪控制律,并给出闭环系统平衡点有限时间稳定的严密证明.
2) 结合车辆动力学仿真软件对所提出的车轮滑移率鲁棒非线性跟踪控制策略的可行性和有效性进行验证,并且与基于传统滑模控制方法设计的车轮滑移率跟踪控制策略进行对比分析,结果表明,本文所提出的车轮滑移率鲁棒非线性跟踪控制策略具有更好的动态响应特性和鲁棒性,可以将车轮滑移率跟踪残差控制在0.32%以内,满足自动驾驶电动汽车的需求.
