田野考古机器人的“前世今生”
2020-12-21谈博伟潜伟铁付德
谈博伟 潜伟 铁付德

2016年科技部、文化部、国家文物局联合印发的《国家“十三五”文化遗产保护与公共文化服务科技创新规划》中提到“考古预探测智能机器人”等核心关键技术。2020年十三五国家重点研发计划“重大自然灾害监测预警与防范”中的重点专项(文化遗产保护和利用专题任务)“文物出土现场应急保护技术体系研究”中也提出了研究新一代“考古预探测智能机器人”。考古与机器人,两个看似并不相交的词语,随着科技的进步被有机结合起来了。考古学家需要机器人,作为他们本体的延伸去探索那些人力不可及的危险区域,机器人学家也需要考古,利用这复杂未知的工作环境去检验机器人的鲁棒性(robustness)和稳定性。目前机器人在遥感考古和水下考古中得到较为广泛的应用,在考古遗址的探查测绘、文化遗产的三维扫描、特征遗物的自动识别等方面大施拳脚。但在工作任务最大最集中的,以地面以及地下遗址为主要研究对象的田野考古中,各方研究较少,这里旨在梳理世界范围内机器人在田野考古中的应用,分析其种类和特点,为后续的研究与使用提供借鉴。
考古机器人的“前世”
在2015年以前,考古机器人的发展处于起步阶段,此阶段考古机器人最主要的特点是采用传统的移动结构,如轮式或履带式,此种结构虽然具有较高的稳定性,但却有着重量大、摩擦阻力大等缺点。最初考古机器人多为远程遥控,后期随着同步定位与地图创建(SLAM)等技术的发展,半自主或全自主考古机器人出现。总体上来说,这一时期考古机器人能够适应的考古环境少之又少,如古代墓葬这类常见的遗址,由于地下空间有限,底部时常会有积水或淤泥覆盖,考古机器人所能发挥的空间有限;其次考古学家也担心刚性的机械结构对遗址中脆弱文物造成不可逆的伤害,对考古机器人有着抵触情绪。
1991年,德国考古研究所利用机器人对胡夫金字塔进行了首次探索。德国机器人专家Rudolf Gantenbrink前后设计了“UNNAMED”“UPUAUT-1” “UPUAUT-2”三款机器人,对位于胡夫金字塔皇后墓室的狭小甬道进行探查。其中履带机器人UPUAUT-2为典型代表。该机器人全身由铝材打造而成,小巧轻便,长370毫米,宽120毫米,高度在120—280毫米范围内可调。携带了各种当时最精密的设备,如索尼微型摄像机能在无光条件下进行图像传输,前置激光测距仪。但当时无线通信技术并不发达,机器人由电缆传输信号,为了能使机器人走得更远,专门设计了电缆松弛装置,减少电缆与地面摩擦带来的阻力。在1991—1993年间,UPUAUT系列机器人对胡夫金字塔进行了数次探测,精确测量了女王房间南甬道的宽度、长度和坡度,并在尽头发现第一阻挡石,以及石头上的两个类铜把手。但在探查北甬道时,卡在了距入口19米处一个朝西45°的转角中。(Hawass Z, The secret door inside the Great Pyramid; Gantenbrink R, The Upuaut Project)此次探索不仅开启了机器人在田野考古中的应用先例,还促进了后续一系列对金字塔的探索。基于这些探查数据Rudolf Gantenbrink给出了金字塔内部结构的计算机模型,对金字塔构建思路进行了大胆的猜想,并提出了接下来的重点探测区域。(Gantenbrink R, Ascertaining and Evaluating Relevant Structural Points Using the Cheops Pyramid as an Example)
2001年,美国IROBOT公司生产的金字塔漫游者在UPUAUT系列机器人工作的基础上继续对胡夫金字塔进行探查。相比于UPUAUT机器人,金字塔漫游者携带设备更多,功能更加强大,包括能够测量厚度的超声波传感器、可以穿透混凝土的探测雷达系统,以及力度测量仪、高分辨率精密光纤镜头、导电传感器等。该机器人成功穿越了整个南部甬道,并在第一阻挡石上钻了一个洞,通过机械臂将摄像机送到洞后,观察到了另一块石头,被称为第二阻挡石。机器人还探查了北甬道,发现了一个外观与南面甬道相似的阻挡石。此次探索由美国国家地理频道向全球观众同步直播,引起了不小的“考古热”。
同年在大洋的另一端,哥伦比亚大學教授Peter K Allen与他的团队开发了一种能够在城市环境中自主导航、自动三维建模的机器人AVENUE。该机器人以IROBOT公司生产的ATRV-2全地形车为基础,搭载导航和图像采集的系统、三维扫描仪等。可以自主导航、自主选择三维扫描角度,实现了文物古迹三维建模全自动化流程,提高了建模精度,提高了建模效率。在2001—2007年间,该机器人对法国圣皮耶大教堂、纽约圣约翰大教堂和Monte Polizzo古希腊卫城遗址进行了三维扫描。在2004年该机器人还系统记录位于埃及Amheida遗址考古发掘过程,通过三维扫描实时记录考古发掘的全流程,基于这些数据,考古学家建立了一个网上展示平台,让更多无法亲身参与到发掘中的考古学家和感兴趣的公众了解发掘全过程,并可以根据自己的理解对出土物进行解释判断。
2002年,卡内基梅隆大学开发了一款名为Groundhog的轮式机器人,它更大更重更稳定,有效荷载更是达到惊人的500千克,采用铅酸蓄电池供电,一次充电可运动3千米。它的设计是为了探索那些废弃的工业遗产,诸如矿井矿山等,特殊的地形要求机器人拥有良好的越障能力。该机器人配备两个SICK LMS-200扫描激光测距仪,一个前后安装,获得行径路线的二维地图,一个向上安装获得竖井、通风巷道的二维地图,车载电气设备均做了防爆处理。(Thrun S, Whittaker W, Thayer S, et al. Autonomous Exploration and Mapping of Abandoned Mines)该机器人对20世纪20年代废弃佛罗伦萨矿场、21世纪初废弃的马西斯运煤路线进行了探测,实验证明该机器人拥有良好的越障能力,能适应大多数井下地形,得到的三维扫描数据效果优于人工扫描效果,但该机器人的通信模块尚不够稳定。(Baker C, Omohundro Z, Thayer S, et al. A Case Study in Robotic Mapping of Abandoned Mines)
2006年,我国第一个考古机器人诞生,由哈尔滨工业大学与国家博物馆合作的考古现场智能预探测机器人。该机器人主要面向古墓葬环境,能够在考古工作人员尚未进入墓葬发掘现场的情况下预先探测墓葬环境。设计者着重考虑了机器人进入古墓葬的方式和路径,基于我国考古发掘特点,制定了由上而下从探洞或盗洞进入墓室,以及水平方向由墓道进入墓室两种不同的进入方式,分别设计了直筒式机器人和车载式机器人。机器人装有红外摄像机和红外灯照明系统,以及温湿度、氧气、硫化氢、二氧化碳和甲烷浓度传感器,实现了发掘现场的环境参数实时采集,图像实时传输。考古发掘现场智能预探测系统利用设计的机器人对陕西章怀太子墓、延炼发掘现场一座未发掘古墓和庞留发掘现场一座被盗古墓三处考古遗址进行了探查,在探查中,该系统能够较稳定实现两种进入墓室的形式,并采集到了内部壁画的图像以及温湿度和特征气体数据,为后续考古现场文物保护提供了重要依据。(王珏瑶等:《考古发掘现场智能预探测系统的设计与应用》)
2012年意大利佩鲁贾大学设计了一款考古机器人,旨在对意大利史前人类居住洞穴Deer Cave进行精确测绘。该机器人基于IROBOT公司生产的ATRV-2全地形机器车,搭载位置传感器、全球定位系统、机载磁罗盘、400 MHz扫描探地雷达。该机器人可以自主纠正路线,利用探地雷达探测洞穴地下结构、延伸方向,实现了对史前考古遗址Deer Cave洞穴自主探查,绘测整体大小及形制,并对洞穴内壁画进行三维扫描,为该遗址规划控制保护带提供了重要依据。
2015年尤利乌斯马克西米利安大学维尔茨堡分校Dorit Borrmann等人为了提高工作效率,减少现场工作时间,设计了一款名为Irma3D的机器人,工作人员可以远程遥控机器人对文化遗产进行三维扫描。该机器人以Volksbot公司生产的RT 3三轮底盘为基础搭建而成,重17千克,载重25千克,长580毫米,宽520毫米,高315毫米。在底盘上放置了三维激光扫描仪,可以实现自动避障。该机器人还采用了一种新的高精度姿态跟踪系统iSpace对三维扫描仪姿态进行校准,得到更贴近真实的模型。Irma3D机器人采集了罗马奥斯蒂亚古城遗址和德国伍尔茨堡皇宫两处文化遗产的三维数据。
2015年由欧盟资助的ROVINA项目达到了基于传统移动机构的设计巅峰,该项目旨在利用自主机器人更安全、高效地对室内外的遗址进行调查探索。V. A. Ziparo、F. Cottefoglie设计了一款履带式机器人,该机器人系统可以自主或半自主地进行实时定位与地图构建。设计者在基于g2o的SLAM后端优化算法DCS进行扩展,搭建了一个新型的三维重建系统,该系统针对文化遗产的特性,将机器人的稳定性、安全性提上重点,强化了地图构建过程中的连续性,并加入自动校准功能。此外,该机器人可以利用Kinect事先预判前方地形的可通过性。该机器人对位于罗马的Priscilla地下墓穴和位于那不勒斯的St. Gennaro地下墓穴进行了自主三维重建工作,实践证明该机器人在非结构化、照度变化较大的墓室环境中应用良好,得到的效果图对考古学上进一步的语义阐释提供了重要参考依据。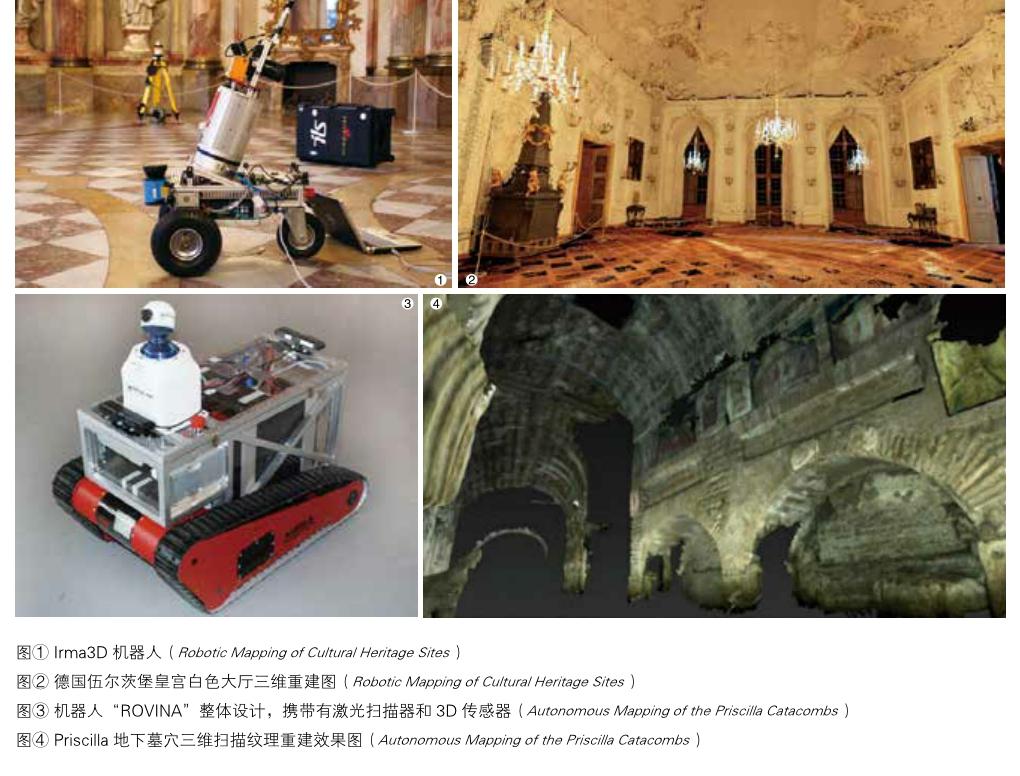
机器人的“今生”
近几年机器人技术突飞猛进,交叉学科融合的趋势愈演愈烈,仿生学、人工智能、智能材料等方面新兴技术的出现给考古机器人带来了更多发展空间。在这一阶段,考古机器人最大的特点是采用仿生式移动系统,如仿尺蠖、蛇、藤蔓等,相较于传统的移动机构具有更强的越障能力,在控制方面也更加智能。最重要的是,在这一阶段设计者开始有意识地将文物保护的最小干预原则理念融入考古机器人设计中。
英国利兹大学机械工程学院Robert Richardson等人设计了一款复合式机器人Djedi,在前两次利用机器人对胡夫金字塔的探测工作基础上,再次对皇后墓室的南北甬道进行探查。设计者将尺蠖运动方式与轮式运动方式复合,确保机器人的攀爬稳定性,又提高了机器人的运动灵活性。该机器人主体材料由铝材、碳纤维构成,大大减轻了重量,车头车尾装备侧推器,实现了甬道内车体左右移动,以适应通道内地形的变化。采用了以板载电子器件作为低電平系统上的闭环反馈的控制策略;携带多种传感器以探测环境温度、外界空气压力;装载小孔钻头与蛇臂摄像机,可以通过小于8毫米直径的管道实现360°图像采集;该机器人通过线缆通信。该机器人设计遵循了文物保护中的最小干预原则,凡是与古代遗址有接触的地方都采用柔软材料,避免对古迹的损害。该机器人对南甬道第一阻挡石与第二阻挡石之间进行了全方位探索。(Richardson R, Whitehead S, Ng T C, et al. The “Djedi” Robot Exploration of the Southern Shaft of the Queens Chamber in the Great Pyramid of Giza, Egypt)在Djedi机器人的设计过程中,机器人专家基于不同的移动系统设计了多款机器人,事先在模拟的甬道中进行实验比较,最后选择稳定性最高的设计,以确保在实际应用中万无一失,该做法说明了在脆弱且珍贵的考古工作环境中专门定制化工作的重要性,但同时这种专业定制化的机器人很难再应用于其他考古遗址中。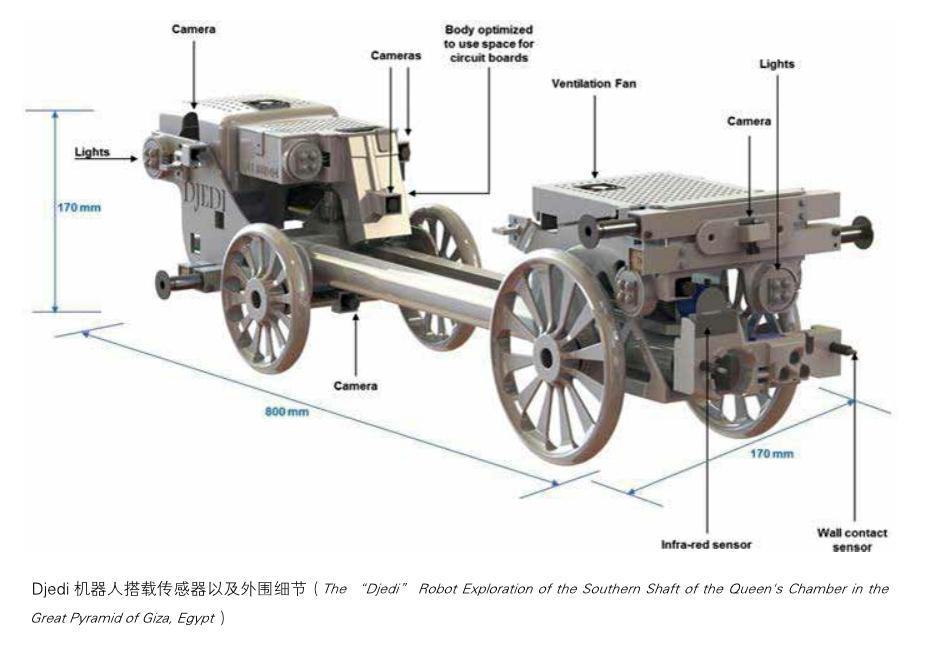
卡内基梅隆大学Howie Chose教授设计了模块化机器蛇“Uncle Tom”,其设计初衷是救灾救援,长94厘米,直径5厘米。蛇形机器人头部安装有一个摄像头和照明用的LED灯。该机器人采用螺旋步态实现向前爬行,能在崎岖的废墟上前行。该机器蛇还可安装不同材质的皮肤以适应各种极端环境。(Wright C, Johnson A, Peck A, et al. Design of a Modular Snake Robot)受波士顿大学考古学教授Kathryn Bard邀请,该模块化蛇形机器人对埃及Mersa/Wadi Gawasis遗址两个容易塌方的洞穴进行了探测。但这条蛇形机器人在洞穴内的作业并不顺利,进入洞穴不久,便遇见了无法通过的阻碍。(Bard K A, Fattovich R, Ward C. Mersa/Wadi Gawasis 2010—2011)
2015年东北大学张培强、岳林对一款考古现场探测的可重构蛇形机器人进行了驱动机构和关節机构的设计。其驱动方式采用张紧轮传动,关节驱动采用差动轮系耦合驱动结构。机器人单元模块的尺寸为198.5毫米x110毫米x 110毫米,可以组装为三个、四个,甚至更多单元模块。首节单元模块为图像采集模块,第二节为温度传感器模块,第三节为湿度传感器模块,末节为气体采集模块。当机器人需要翻越更大的障碍或是跨越更大的沟壑时可以外接接头来增加单元模块。设计者通过Adams软件对机器人进行运动仿真分析,验证机构和运动机理的合理性,并验证运动规划的正确性。实物并没有在真实的考古环境中应用,在模拟场景中经过测定四节模块,机器蛇最宽能跨越446毫米的沟壑,最高攀爬高度为383毫米,最大坡度为31°。(岳林:《可重构蛇形机器人关节机构设计及运动性能研究》;张培强:《可重构蛇形机器人驱动机构设计及运动性能研究》)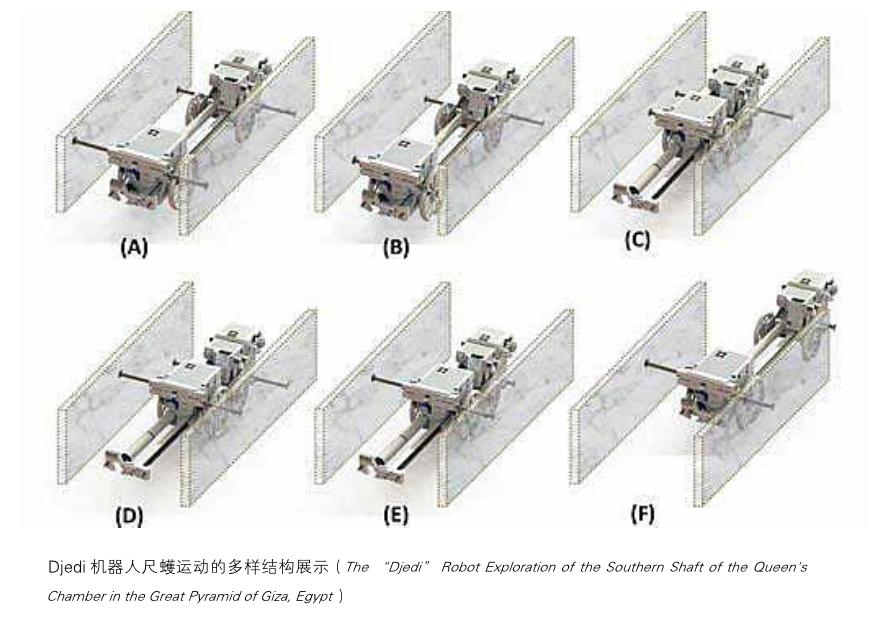
斯坦福大学Allison M. Okamura教授设计了一款名为Vinebot的仿生物藤蔓机器人,其以“生长”形式来运动,即通过机器人顶端外翻新材料向外延伸的方式前进。可以在顶端配备摄像头、LED灯以及各类所需传感器。该机器人有如下特点:第一,拥有极强的越障能力,能穿越崎岖、粘滞和陡峭的地形;第二,具备空间可变形能力,理论上能达到空间上任何一点,能进入为其初始直径四分之一的孔洞;第三,能在杂乱或难以导航的环境中操作和抓取对象。该机器人整体结构由高分子聚合物构成,由气压驱动,能将在工作中对考古环境产生的干预降至最低,贴合文物保护中最小干预原则。2018年考古学家将其带到秘鲁Chavín de Huántar遗址,用来探查遗址内入口狭小、内部崎岖的地下通道,Vinebot共探索了3个地下通道,分别前进了5米、6米、3米,实现了通过碎石障碍、90°转弯、垂直方向运动,并拍摄了地下通道内部环境视频,为考古学家提供了宝贵资料。(Coad M M, Blumenschein L H, Cutler S, et al. Vine Robots: Design, Teleoperation, and Deployment for Navigation and Exploration)但该机器人控制系统的设计难度很大,开发周期较长。
走向未来
从上述考古机器人的研究与应用中我们能够看到虽然仅有20多年的发展,许多研究还处于实验阶段,但科学家们发现了许多重要且具有创新性的应用。机器人填补了在田野考古中狭小危险地带有效勘测的空白,不仅使得探查人力无法到达的空间成为可能,也保障了考古学家的安全。考古工作环境常常是非结构化环境,文物也具有唯一性和不可再生性,在种种机器人移动结构中,仿生式有着良好的应用前景。随着机器人技术日益成熟,新型田野考古机器人将不断涌现。但是,目前的研究重点集中在将田野考古的需求与机器人设计相结合,深入研究智能材料、人工智能、机器人技术与田野考古之间的关系,使田野考古机器人更好地服务田野考古、帮助考古学家。
(作者谈博伟为北京科技大学科技史与文化遗产研究院硕士研究生;潜伟为北京科技大学科技史与文化遗产研究院教授 ;铁付德为中国国家博物馆研究员)
