舰船惯导系统运动中传递对准方法研究
2020-12-19韩雪峰
韩雪峰
(海军装备部驻大连地区第二军事代表室,辽宁 大连 116021)
0 引 言
对于舰艇发射平台,由于舰船的机动能力有限不能刻意完成首摇、横摇、纵摇等机动,仅能靠船体作转向运动或由于风浪的作用引起船体自身的晃动,提供角速度激励,因此所采用的传递对准方式需要在特定的角运动下才能完成,且对准精度和速度不能得到保证[1],通常采用速度匹配方式完成舰船平台下的传递对准。采用该方式进行传递对准,水平姿态误差角由于重力的作用,能很快收敛,但航向角的对准精度和对准速度,取决于对准过程中载体所感测到的水平比力的大小,由于舰船惯性很大,加速或减速都非常缓慢,因此在对准过程中需要做转弯运动以提供水平方向的比力[2–3]。由于现阶段舰船常用的捷联惯导在运动中可提供较精确的姿态和角速度信息,所以本文设计提出一种基于“姿态+速度”匹配的传递对准方法,并对不同杆臂条件下的对准情况进行了仿真研究。
1 传递对准方案设计
1.1 坐标系定义
1)导航坐标系( n 系)
文中采用东北天地理坐标系作为导航坐标系。
2)主惯导载体坐标系( bm系)
原点位于主惯导中心的右前上坐标系。
3)子惯导载体坐标系( bs系)
原点位于子惯导中心的右前上坐标系。
1.2 速度匹配传递对准
1)速度匹配传递对准状态方程
取状态变量为:

其中: φn为子惯导姿态误差角;为子惯导速度误差;为子惯导陀螺的常值漂移;为子惯导加速度计的常值偏置误差。则系统的状态方程为:

综上所述,速度匹配传递对准状态方程写成矩阵形式如下:

2)速度匹配传递对准的量测方程
在传递对准开始时刻将主惯导的姿态、速度和位置装订给子惯导。子惯导根据初始装订值开始进行导航解算,子惯导给出的载体地速为此时主惯导输出的载体地速为由主惯导输出计算得到的杆臂速度为其中 rbm为杆臂矢量,则速度匹配的量测为:

定义:

又因为子惯导地速可以表示为:


令

在速度匹配传递对准过程中将 VV作为等效量测噪声,则速度匹配传递对准量测方程为:

3)速度匹配传递对准状态空间模型
根据式(2)和式(12)得速度匹配传递对准的状态空间模型为:

1.3 速度+姿态匹配传递对准
则有:
构造如下矩阵:
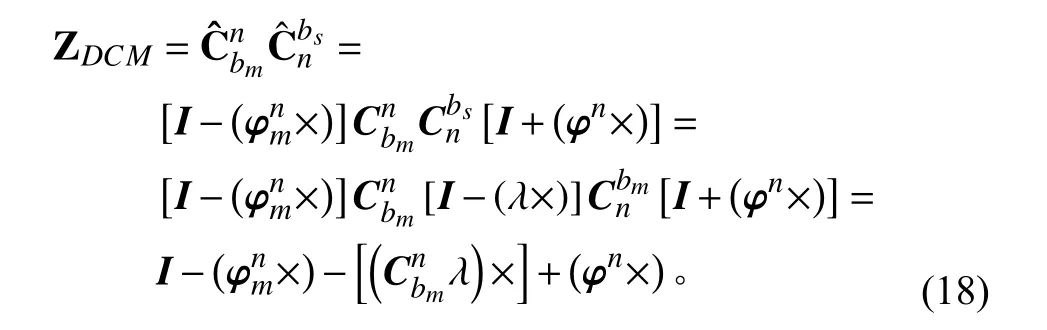
由式(18)可知, ZDCM为反对称阵,记ZDCM=则Zx,Zy,Zz可 按 下 式 确 定:

其中 ZDCM按式(1 4)确定。选取量测量为Zθ=根据(19)式,可得姿态量测方程为:

2)姿态+速度匹配传递对准状态空间模型

写成矩阵形式如下:

量测方程为:

式中, V 为零均值Gauss 白噪声。
2 设计方案研究验证
2.1 仿真条件
仿真条件如表1 所示,载体运动轨迹如表2 和表3所示。
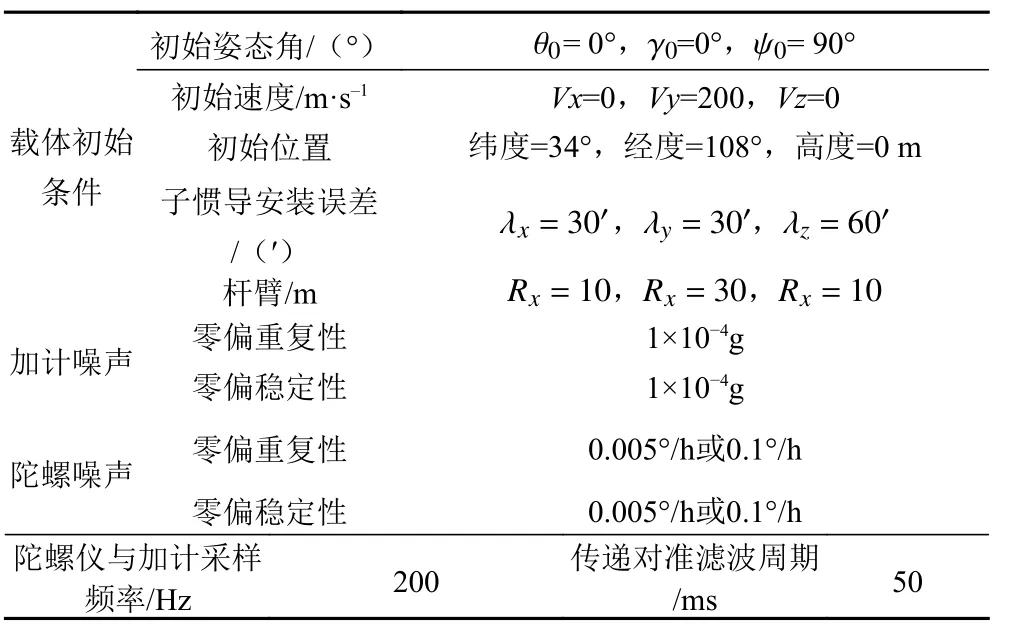
表1 仿真条件Tab.1 The simulation conditions
2.2 不考虑杆臂与挠曲变形仿真
1)仿真1
不考虑杆臂与挠曲变形,载体按轨迹1 运动,选取0.005°/h 的陀螺仪进行仿真,仿真结果如图1 所示。
2)仿真2
不考虑杆臂与挠曲变形,载体按轨迹1 运动,选取0.1°/h 的陀螺仪进行仿真,仿真结果如图2 所示。

表2 轨迹1Tab.2 Track 1
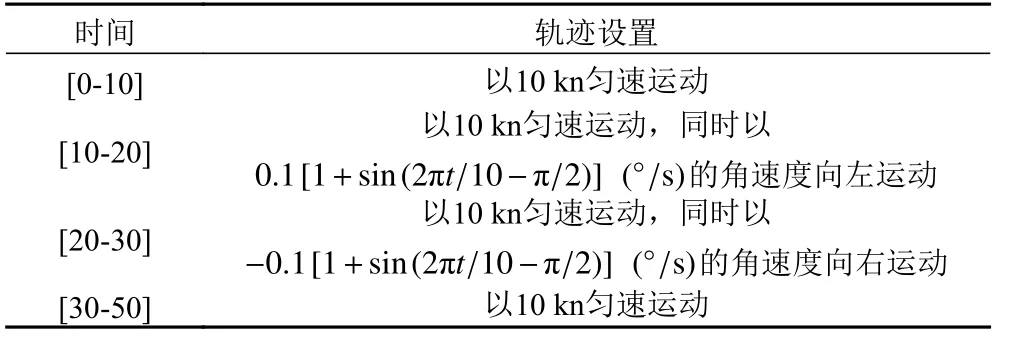
表3 轨迹2Tab.3 Track 2

图1 传递对准误差Fig.1 Transfer alignment error
3)仿真3
不考虑杆臂与挠曲变形,载体按轨迹2 运动,选取0.005°/h 的陀螺仪进行仿真,仿真结果如图3 所示。
4)仿真4
不考虑杆臂与挠曲变形,载体按轨迹2 运动,选取0.1°/h 的陀螺仪进行仿真,仿真结果如图4 所示。
从仿真结果可以看出,在不考虑挠曲和杆臂的情况下,水平安装误差角估计可以迅速收敛且与机动状态关系不大,经过10 s 钟的对准后,水平安装误差角误差小于1 角分。航向安装误差角对准精度和对准速度主要取决于机动的大小,经过20 s 的机动后轨迹1 的航向安装误差角的对准精度较高小于1 角分,而对于轨迹2 由于航向角速度太小,经过20 s 的机动后并没有完全收敛,要达到更高的对准精度需要进一步作转弯机动。

图2 传递对准误差Fig.2 Transfer alignment error

图3 传递对准误差Fig.3 Transfer alignment error

图4 传递对准误差Fig.4 Transfer alignment error
2.3 考虑杆臂与挠曲变形仿真
1)仿真5
设载体按轨迹1 运动,选取0.005°/h 的陀螺仪进行仿真,仿真结果如图5 所示。

图5 传递对准误差Fig.5 Transfer alignment error
2)仿真6
设载体按轨迹1 运动,选取0.1°/h 的陀螺仪进行仿真,仿真结果如图6 所示。
3)仿真7
设载体按轨迹2 运动,选取0.005°/h 的陀螺仪进行仿真,仿真结果如图7 所示。
4)仿真8
设载体按轨迹2 运动,选取0.1°/h 的陀螺仪进行仿真,仿真结果如图8 所示。
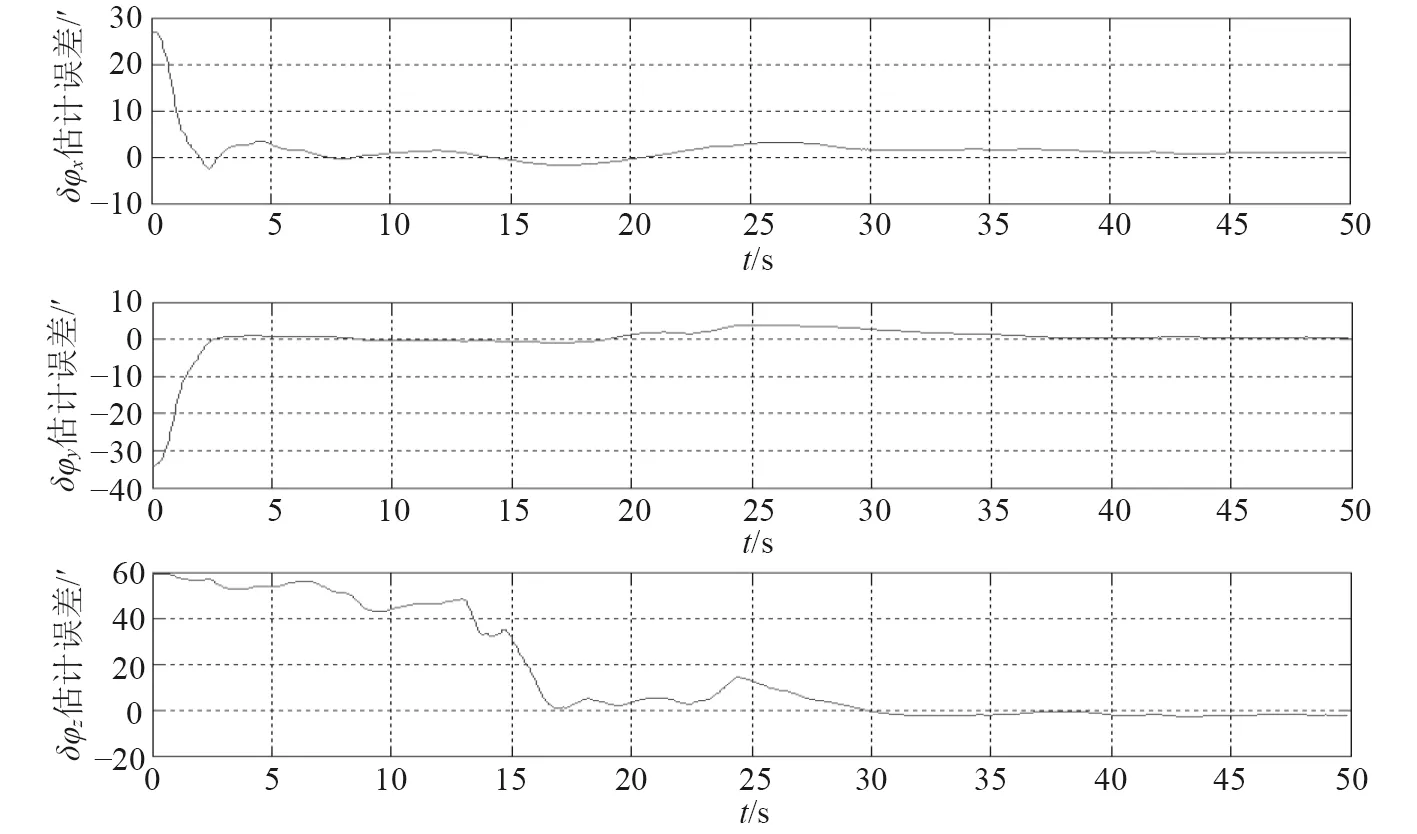
图6 传递对准误差Fig.6 Transfer alignment error

图7 传递对准误差Fig.7 Transfer alignment error

图8 传递对准误差Fig.8 Transfer alignment error
从仿真5~仿真8 可以看出,当存在杆臂和挠曲变形时,与不考虑杆臂和挠曲变形的情况相比传递对准精度受到严重影响,这是因为当存在挠曲变形时姿态量测受到挠曲变形的污染而变差。但是对于相同的挠曲变形的情况下,轨迹中角速度越大则对准效果越好,这是因为角速度越大越有利于提高姿态量测得信噪比,有助于提高传递对准的精度。因此,在考虑挠曲变形的情况下尽量选择较大的机动来提高对准精度。
3 结 语
本文设计一种基于“姿态+速度”匹配的传递对准方法,并对不同杆臂条件下的对准情况进行了仿真研究。试验结果表明,所提方法在配合有合理机动的条件下,能有效的实现传递对准,为后续应用奠定基础。
