基于移动激光点云的轨道中线自动检测
2020-12-17李亚辉潘成瑜秦守鹏
许 磊 李亚辉 潘成瑜 秦守鹏 谭 兆
(1. 中国铁路设计集团有限公司,天津 300251; 2. 广西宁铁测绘科技有限公司,广西南宁 530001)
铁路轨道是整个铁路工程中最为重要的组成部分,其几何状态直接影响列车的安全平稳运营。 铁路线路经过长期的运营,轨道的几何形位会发生改变,故轨道中线测量是铁路运营维护和线路改造前的重要任务。 传统方式中,多采用全站仪、全球卫星定位系统、几何水准仪和轨道检测小车等设备进行接触式逐点测量。 此类方法不仅测量效率低,而且会干扰正常的列车运营,存在较大安全隐患。 因此,亟需一种非接触式快速移动方式来实现轨道中线自动提取。
车载移动激光扫描技术是一种集成全球卫星导航系统(GNSS)、惯性测量单元(IMU)、激光扫描仪、数码相机、数码摄像机等多种传感器的综合测量检测技术。各类型传感器在移动状态下可自动采集各种位置、姿态、影像和激光扫描数据,并通过统一的地理参考和数据采集同步技术,实现无接触式的空间地理信息采集、处理与入库。 作业过程中,将集成的三维激光扫描系统搭载于轨道车上(或安装在汽车上,并将汽车开上平板车),通过载体的移动,快速采集铁路两侧(几十至几百米范围内)海量点云和影像数据。 通过地面GNSS 基站、移动GNSS 接收机、地面控制点、IMU 和激光扫描仪数据的联合解算,得到高精度三维激光点云数据。 相较于地面激光扫描或机载激光扫描,车载移动扫描具有高效、灵活的优势,越来越多地应用于工程实践中。
近年来,国内外学者利用车载移动激光点云,开展轨道的分类与中线自动提取的研究。 Yang 等采用移动窗口方法来实现轨道点云自动提取[1],并指出在铁路道岔区域会存在轨道点云错误分类等情况;Elberink 等提出,利用轨道局部平行特征和高度信息可实现轨道点云分类与中线提取[2];Yoonseok 等采用卡尔曼滤波方法实现了轨道点云自动提取[3];也有学者通过基于特征(如支持向量机)或模型(如模板匹配)的方法进行钢轨点云提取与模型重建[4-15]。 以上方法虽然能够实现轨道点云自动提取与轨道中线计算,但需处理全部点云数据,耗时较长,还可能出现轨道错误分类的情况。 另外,以上文献中提取的线路中线是左右轨道中心线,在小半径的曲线地段,为减小轮轨间横向作用力与钢轨磨耗,轨距会适当加宽,此时线路中线不是左右轨道的中心连线,这会给计算带来一定的误差。
本文的主要贡献有以下几方面。
(1)改进对全部点云进行高程直方图统计计算,利用激光入射角度信息,实现路基及轨道点云的快速分割,提高轨道点云提取的计算效率。
(2)改进利用接触网和轨道之间位置关系的先验知识,利用移动扫描的轨迹线和轨道之间相对稳定的位置关系,采用半径搜索、矩形分割、高程过滤、线性采样等方法,实现左右轨道点云自动提取。
(3)直接将左右轨道点云投影至线路中线上进行线性拟合,根据左右轨道局部范围平行与距离固定的特性,采用平行直线模型的线性采样一致性算法,实现左右轨道中线参数提取,再基于左右轨道中线计算线路中线。
1 方法介绍
图1 为轨道中线自动提取方法流程,整个流程包括3 个主要部分。
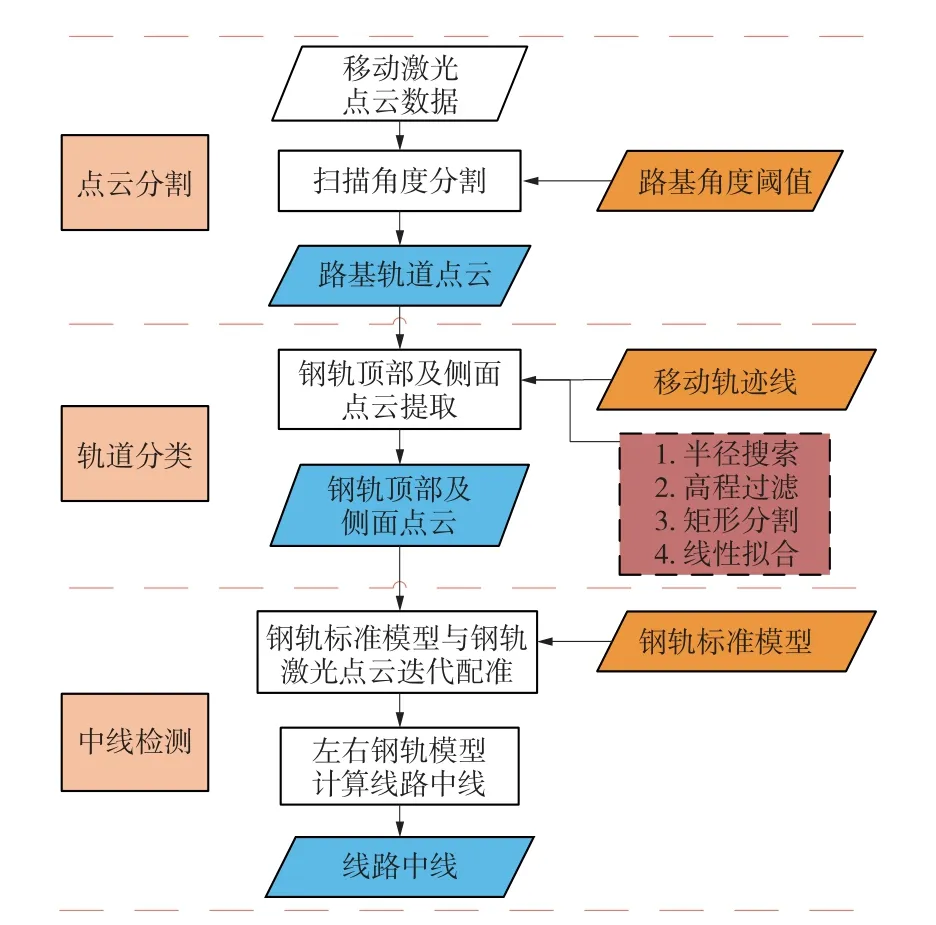
图1 轨道中线提取流程
(1)轨道结构点云分割
根据轨道宽度及扫描仪至轨道顶部的高度,计算路基或桥隧建筑物点云对应的扫描线最大、最小激光入射角度值,根据设定的阈值进行激光点云的角度值过滤,实现路基、桥梁、隧道等其他工程结构及轨道点云的快速分割。
(2)钢轨点云提取
利用移动扫描平台的轨迹线和轨道之间局部相对稳定的空间位置关系,采用数据驱动的方法,实现左右轨道顶部点云自动提取。
(3)轨道中线提取
根据左右轨道在局部相互平行且轨道距离固定,采用平行直线模型的线性采样一致性算法,实现左右轨道线性拟合,再利用分段拟合的左右轨道线性参数,计算轨道中心线。
1.1 路基点云分割
利用激光点记录的扫描仪旋转角度信息,从铁路沿线扫描的激光点云中,快速分割出路基及轨道点云。如图2 所示,两个激光扫描仪下方红色为分割后得到的铁路路基及轨道结构点云。
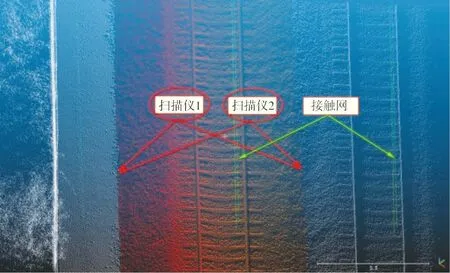
图2 基于扫描仪角度信息分割轨道附近点云
车载移动激光扫描仪采用机械式旋转反射棱镜方式,可实现360°圆周断面扫描,再通过扫描仪搭载平台在轨道上移动,实现铁路范围及两侧一定距离范围的扫描。 扫描角度范围从-180°~+180°,瞬时激光入射角度根据式(1)进行计算。

式中,Pi表示第i 个激光点;ST表示路基、桥隧构筑物及轨道点云;SO表示其他点云;θmin、θmax表示第i个激光点至断面线的纵向距离、正交距离;δ 表示角度分割阈值。
在采集数据过程中,扫描仪会记录扫描头旋转的角度信息,扫描头每次步进旋转的角度值是固定的,故每次圆周扫描的角度起点也是固定的。 一般从扫描仪正下方开始,并以这点结束,完成圆周扫描。 轨道提取只考虑扫描仪底部固定扫描角度范围内的点云。 为减少数据量和提高轨道点云提取计算速度及准确性,应首先将扫描仪下方一定断面宽度的激光点云进行分割。
利用移动平台的轨迹线对扫描数据进行解算,获得全线统一坐标系下的激光点云。 将预处理后的扫描数据导出(LAS 格式数据),扫描仪旋转角度范围为-90°~+90°,扫描仪正下方为扫描起始,旋转至扫描仪正上方为90°,轨迹线前进方向左侧为负,右侧为正。LAS 角度范围为180°。
在扫描设备安装至移动搭载平台后,扫描仪相对轨道的空间位置稳定,两根钢轨之间的轨距固定。 可以通过测量扫描仪至钢轨顶部垂直距离H,扫描仪至左侧钢轨的水平距离S1,计算轨迹线左侧轨道点云对应的扫描仪角度θmin;测量扫描仪至右侧钢轨的水平距离S2,计算右侧轨道点云对应的扫描仪角度为θmax,或者在轨道点云上直接选择左右钢轨点云,查看选择点的扫描角度值。 再设定阈值δ,根据式(1)遍历所有激光点云,即可分割出铁路路基及轨道结构点云数据。
如果移动扫描系统含有多个扫描仪,需要分别按照扫描仪角度分割激光点云,再将多个扫描仪分割的激光点云进行合并。 受扫描仪测量误差等因素影响,合并后的路基、桥隧构筑物等激光点云会出现“远离”隧道结构的少量激光噪声点,此类少量孤立点会影响轨道提取结果。 根据邻域点的距离统计分析,设定判断准则进行“离群点”判断,可实现孤立噪声点剔除。
1.2 轨道点云提取
通过上一步的角度阈值进行激光点云分割,将大部分扫描数据进行剔除,仅保留扫描仪下方一定截面宽度的点云数据。 这部分数据结构比较简单,仅包含轨道、轨枕、道砟数据,如图3 所示。
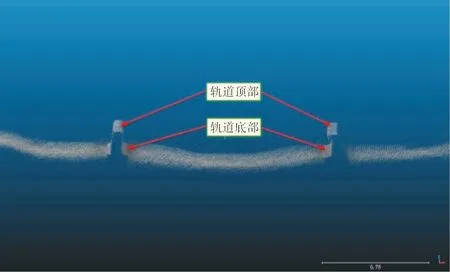
图3 扫描角度分割后截取的一段轨道点云
铁路线路有其自身的特点。
(1)沿线路方向钢轨轨面高程连续变化,且最大坡度为固定值。
(2)垂直线路方向的两根钢轨基本平行,且两个钢轨的距离一般与标准轨距(1.435 m)非常接近,故在数据处理时,采用标准轨距产生的误差对于分析结果并无显著影响。
铁路移动激光扫描轨迹文件包含设备中心空间三维位置及姿态数据。 轨迹线的空间位置数据记录扫描仪每条扫描线的相对参考坐标系的位置,曲线由一定空间距离的连续点组成。 当整套扫描系统安装至移动平台上进行扫描时,轨迹线空间位置相对左右钢轨的水平距离和高度固定(直线线路),或者在很小的范围内连续变化(曲线线路)。 因此,利用轨迹相对轨道的空间位置在局部固定或全线连续变化的特点,结合轨道自身结构信息,可快速实现轨道点云自动提取。
(1) 轨道点云预处理
为获得轨迹线与轨道之间位置参数,需要进行以下3 步的准备工作,完成轨迹线相对轨道顶部的水平距离ΔD0与垂直高度ΔH0的初始值计算,如图4所示。
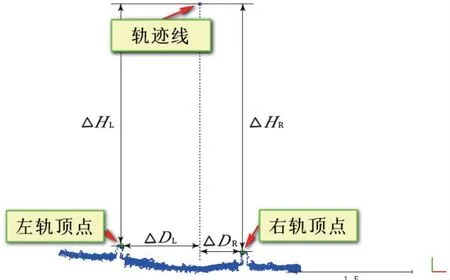
图4 轨迹线和轨道顶部相对关系
首先,截取一段长1 m 的轨迹线定位点数据,采用线性拟合的方法,得到此段轨迹线定位点对应的起点A 和终点B;然后,以直线段AB 为对称轴,在AB 左右各1 m 宽度建立XOY 平面的分割矩形。 通过遍历激光点云,判断点是否在分割矩形内,完成轨道点云分割;最后,利用轨迹线建立的坐标系(以A 点为坐标原点,轨迹线前进方向为X 轴、在水平方向垂直轨迹线为Y 轴,垂直XOY 平面的为Z 轴,建立坐标系),将此坐标系对应下的激光点云旋转至ZOY 平面,在此平面分别选择左侧轨面与右侧轨面的顶点,即可分别计算轨迹线至轨道顶部的水平距离ΔD0与垂直高度ΔH0,计算方法如式(2)所示。
式中,ΔHL、ΔHR表示左侧轨道顶点、右侧轨道顶点至轨迹线的垂直高度;ΔDL、ΔDR分别表示左侧轨道顶点、右侧轨道顶点至轨迹线的水平距离;ZARO、ZBRO示将A、B 点旋转至ZOY 平面内的Z 坐标; YARO、YBRO表示将A、B 点旋转至ZOY 平面内的Y 坐标;ZPL、ZPR表示将左轨面顶点PL、右轨面顶点PR旋转至ZOY 平面内的Z 坐标;YPL、YPR表示将左轨面顶点PL、右轨面顶点PR旋转至ZOY 平面内的Y 坐标。
(2)轨道顶部点云提取
完成以上的初始值计算后,可采用迭代方式对轨道顶部点进行提取,提取过程如图5 所示。
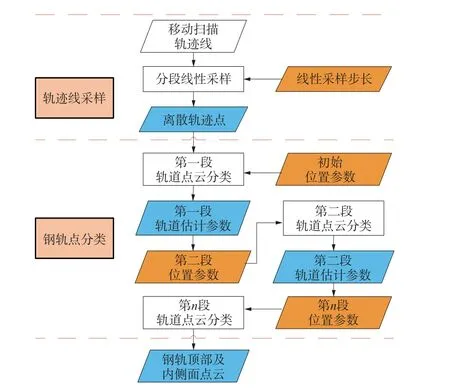
图5 轨道顶部点云提取流程
为提高自动提取的处理速度,采用以下策略。
①建立轨道点云KD 树结构,提高点云搜索效率。
②设定固定步长(Fixed Depth),分段线性拟合轨迹线,获得等间距的多段线。
③平移分段拟合轨迹线段:将分段拟合的轨迹线段AB、利用初始水平距离ΔD0与垂直高度ΔH0,平移至轨道顶部A′B′。
④半径搜索和矩形分割:取直线段A′B′的中点C 为原点,以A′B′长度的一半为半径,进行半径搜索。 再以A′B′为轴建立矩形(Rectangle Width),在XOY 平面内,分割矩形内部点,完成轨道点云初步分割(如图6)。
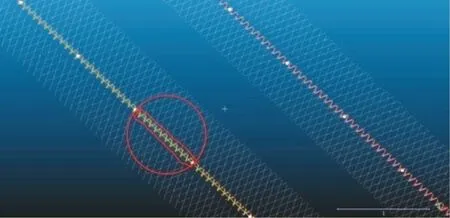
图6 轨道点云半径搜索后进行矩形分割
⑤点云高程过滤:取A′、B′的最大高程Hmax和最小高程Hmin。 长期运营的轨道顶面比较光滑,导致点的离散度较大,轨面上点会出现上下“跳跃”的情况。因此,设置一定的高度阈值(Elevation Threshold),采用式(3)进行高程滤波,初步提取轨道顶部点云。

式中,Pi 表示第i 个激光点;SST、SSO分别表示轨道顶部点云、其他点云;Hmin、Hmax分别表示平移至轨道顶部的拟合轨迹线最小高程值、最大高程值;δ 表示高度过滤阈值。
⑥线性采样分析:利用高程过滤得到的轨道顶部点云,进行RANSAC 分析,获得线性拟合参数。 通过遍历采样点至直线参数的距离(Distance Threshold),判定是否为轨道顶部点。 在进行线性重采样时,可以利用轨道顶面采样线和分段轨迹线的直线A′B′基本平行,设置一定的角度阈值(Angle Threshold),进行直线采样的角度约束。 如果线性采样成功,将得到轨道顶部点云和线性采样起点A″和终点B″。
⑦更新几何参数:根据线性采样计算的A″、B″,结合A、B 点,重新计算轨迹线相对轨道顶部的水平距离ΔDi与垂直高度ΔHi,新的几何参数将用于下一段轨道顶部点云分割,采用式(4)计算轨道几何参数。
式中,Vec2D(A″-A)·Nor 表示二维向量A″A 的长度;Vec2D(B″-B)·Nor 表示二维向量B″B 的长度;ZA、ZA″、ZB、ZB″分别表示A、A″、B、B″的高程值;δ 表示高度过滤的阈值。
⑧循环进行1 ~5 步:使用更新后的水平距离ΔDi与垂直高度ΔHi几何参数,进行下一段轨道顶部点云提取。
(3)轨道中线检测
上个步骤中,已完成轨道顶部点云提取,接着将从左右轨道顶部点云中自动提取轨道中线,再利用提取的轨道中线,计算线路中线。 在不考虑轨距偏差的情况下,利用轨道在局部范围内可视为横向距离固定并且平行的特性,采用平行直线模型的RANSAC 算法,分段提取左右轨道顶部点云中心线。 设定一定的高差与轨距阈值,在此阈值范围内的点定义为直线地段,线路中线直接取平行直线的中心对称点。 超出此阈值的段落判定为曲线地段。 直线段将高程较低侧的轨道中线向另一侧轨道方向进行平移(gauge/2,gauge 为标准轨距),曲线段将外轨轨道中线向另一侧轨道方向平移(gauge/2,gauge 为标准轨距),线路中线取平移后轨道中线的中点。 最后通过将分段提取的线路中线经过多项式拟合,获得光滑的线路中线。
2 实验分析
2.1 实验概况
为验证该方法的正确性,使用RIEGL VMX-450 Rail 系统进行数据的获取。 这个系统主要有以下几个部分:①2 个全波段 VQ-450 激光扫描头;②4 个高分辨率工业相机;③POSPAC LV510 GNSS/IMU 定位与定姿系统。 将这套系统安装在汽车顶部,然后将汽车固定于火车的平板车的尾部,使激光扫描仪可以获得下部轨道数据。 精度约8 mm,最大有效测量速率约110 万点/s,扫描仪底部铁路路基上点密度约1 200 点/m2,原始扫描点云如图7 所示。

图7 移动激光扫描获取的轨道点云
为评价该方法的可靠性和精度,在哈尔滨至牡丹江一段长约100 km 的铁路线进行往测和返测扫描。由于这条铁路处于正常运营使用期,扫描车会对正常行驶的列车进行避让,扫描时间为07:20~21:20,历时14 h。 在正常行驶过程中,平均移动速度约60 km/h。共计约200 km 长度的扫描,预处理后的点云和影像数据约1.78TB。 沿线间隔约10 km 架设一个GPS 基准站,共计架设9 个,基准站采样频率统一设置为1 Hz,全程不间断接收GNSS 信号。
2.2 轨面点云提取
利用移动扫描轨迹线和轨道之间相对稳定的空间位置关系,分段采用半径搜索、矩形分割、高程过滤等算法,实现轨道顶部点云粗略提取。 利用轨道局部平行于轨距固定特性,采用直线RANSAC 算法,实现轨道顶部点云提取(如图8 所示)。
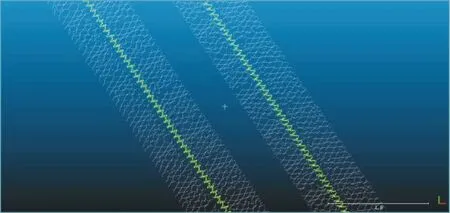
图8 轨道顶部点云提取
2.3 轨道中线提取
沿铁路线路方向按2 m 间隔直线拟合轨迹线,采用平行直线模型的RANSAC 算法,从左右轨道顶部点云中,分别提取轨道左线中线(绿色)与轨道右线中线(蓝色),再基于左右轨道中线,计算线路中线(红色),提取结果如图9 所示。
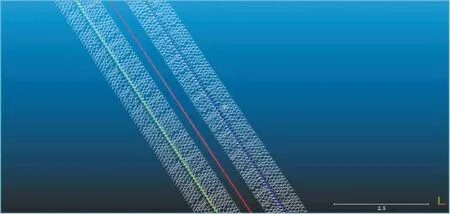
图9 提取的左右轨道中线及线路中线
2.4 实验精度分析
为验证提取轨道中线的精度,采用国家二等几何水准测量方法,对轨道顶部高程进行测量。 选择一段2.76 km 的线路,几何水准测量闭合差为4.2 mm。 将几何水准测量轨面高程作为参考值,轨道提取的高程值与之比较。 经统计,中误差为12.4 mm,最大误差为-26.3 mm。 统计结果如图10 所示。
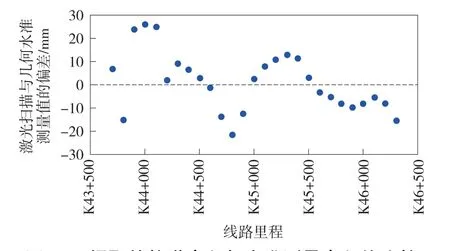
图10 提取的轨道高程与水准测量高程值比较
3 结论
基于扫描仪激光入射角度,采用角度阈值过滤,快速分割路基及轨道点云,减少提取计算的点云数量。车载移动系统的轨迹线和轨道之间的空间位置关系相对稳定,采用多种滤波算法,实现轨道顶部点云的提取。 左右轨道在小范围相互平行且轨道与轨迹线间连续小幅变化,采用平行直线模型的RANSAC 算法,实现左右轨道中心线提取,基于提取的左右轨道中心线,根据线路曲线特性与平滑算法,实现线路中线的计算。采用线性插值的方法,对局部段落轨道中线提取失败处进行插值计算,克服局部段落轨道中线提取易失败的缺点。 提取线路中线几何精度为10 ~30 mm,可满足既有铁路中线测量精度要求。
