舰船综合电力系统的多混合储能协同控制方法
2020-12-17李灏张彦付立军朱琬璐
李灏,张彦,付立军,朱琬璐
海军工程大学 舰船综合电力技术国防科技重点实验室,湖北 武汉 430033
0 引 言
作为综合电力系统的六大功能模块之一,储能装置在提高电力系统稳定性、连续性和供电生命力,减小电网电压波动,改善供电品质,为电力推进设备提供短时应急供电等方面具有突出的优势。在舰船综合电力系统中,因海况等自然因素以及高能负载投入所产生的直流母线电压波动问题,均可通过部署储能系统予以缓解[1]。
根据能量密度和功率密度,现有的储能技术可以分为能量型储能和功率型储能2 种。其中能量型储能主要包括锂电池储能、铅酸蓄电池储能等,其优点是能量密度大、储能时间长,但存在功率密度低、循环次数少等缺点;功率型储能主要包括超级电容储能、飞轮储能等,优点是功率密度大、循环次数多,但存在能量密度小、储能时间短等缺点。由此可见,2 种储能技术的互补性较强,如果复合使用,既可满足舰船综合电力系统的瞬时大功率需求,又能保证长时间持续的能量供给[2-4]。鉴于船舶狭小空间的限制,以及实际的能量供应需求和技术状态,多混合储能系统(hybrid energy storage system,HESS)分布式部署方案应运而生,其中每个储能系统都包含有超级电容功率型储能单元和电池能量型储能单元。该方案既可提高储能系统接入的灵活性,又可避免集中储能单元因使用大容量储能变流器而导致的成本剧增和运行可靠性等问题。
对于单个HESS 的功率分配问题,目前的主流处理方式包括2 种:基于滤波的频率分配法和基于荷电状态(state of charge,SOC)的功率调节法。基于滤波的频率分配法主要包括低通滤波法[5]、滑动平均滤波法[6]、小波分解法[7]、卡尔曼滤波法[8]、虚拟惯性控制法[9-10]和虚拟电容控制法[11],其主要思想是利用超级电容储能来补偿高频的瞬时功率不足,利用电池储能来提供持续的低频能量供应,从而充分发挥超级电容和电池储能各自的优势,但这类方法需要通过不断调整滤波时间常数来保证两者时刻处于安全的SOC 运行区间。基于SOC 的功率调节法并不会对超级电容储能和电池储能采用不同的控制模型,其主要通过检测超级电容的SOC 并调节超级电容储能与电池储能之间的功率分配关系[12]来实现系统功率平衡。Xu 等[13]融合使用了这2 种方法,既保证了不同类型储能按照不同的特性需求出力,又保证了各自运行于安全的SOC 区间内。
然而,上述成果的主要研究对象为单个HESS,尚未应用于多个HESS。当多个HESS 共同为负载供电时,不仅需研究单个HESS 内部不同储能介质之间的功率分配,还需要考虑不同HESS 之间的功率分配。陈景文等[14]针对直流微电网的多电池储能系统,提出了SOC-I 下垂控制方法,用于调节SOC 的均衡运行,但由于下垂控制的底层控制时间间隔很小,而SOC 的测量时间尺度较大,因此该方法对SOC 的实时控制效果较弱;此外,对于容量较小的储能系统而言,易造成SOC 越限、母线电压偏差等问题。何小良等[15]将整个系统分为了多个工作模式,但集中式控制方法难以实现分布式控制,且需要较多的通信支持,导致其可靠性较差;同时,当系统静负荷频繁波动时,工作模式的反复切换易导致系统不稳定。上述文献的主要研究对象为同一介质、同一特性的多个储能单元协同控制,而针对多HESS,周建宇等[16]提出了基于一致性理论的直流微电网多HESS 协同控制策略,利用一致性理论,即可恢复因下垂控制而导致的各端口电压降,从而使直流母线电压的各节点尽量保持一致,以及各个HESS 的总输出功率趋于一致;然而,该文主要聚焦于二次电压调节,并未分析因SOC 不一致所带来的影响。
针对综合电力系统的储能配置需求和现有控制策略的不足,本文拟提出考虑SOC 的多HESS分层动态协调控制策略:在多HESS 控制层,各个HESS 依据其电池的当前SOC 值,通过参考电压调节模型的独立决策并动态调节其HESS 的总输出功率,而功率不足则由其他HESS 单元承担;在单个HESS 控制层,根据超级电容的当前SOC值,采用分段线性调节算法动态调节其充、放电功率,以满足超级电容的优先响应功率突变,而电池储能则提供持续的能量输出,以减小对高、低通滤波器的预处理需求。并将基于PSCAD/EMTDC 仿真平台对该控制策略进行仿真分析,以验证单个HESS 的蓄电池和超级电容器一直工作在SOC 安全运行区间内,且可保持多组HESS之间的分散式动态协调,从而使多HESS 始终处于SOC 安全运行区间内。
1 系统建模
1.1 舰船综合电力系统及混合储能建模
典型的舰船综合电力系统结构如图1 所示,燃气轮机多相整流发电机组和柴油机多相整流发电机组作为系统主电源,连接至中压直流母线,为推进电机、高功率脉冲负载和常规负载供电。由于海洋环境多变所导致的螺旋桨出水或其他情况,将使得推进电机负载存在大功率瞬时突变;同时,高功率脉冲负载也存在瞬时大功率需求,故常规发电机组难以满足电力系统的瞬时功率需求,最终将导致直流母线电压大幅波动。为了保证综合电力系统的安全稳定运行,应配置以超级电容为功率型储能、电池为能量型储能的混合储能系统。同时,由于水面舰船的内部空间较为狭小,所以一般采用分布式布置方案,即各HESS子系统分别布置在各个舱室,共同为系统负载供电。

图 1 典型舰船综合电力系统的结构图Fig. 1 Structure diagram of typical vessel integrated power system
综合电力系统的功率关系如下:

式中,PGen为传统发电机组的发电功率;PHESS为多组混合储能系统的总功率;PLoad为负载总功率,包括常规日用负载、推进负载和高功率脉冲负载的功率。
当舰船综合电力系统离岸运行时,储能系统将主要负责补偿PGen和PLoad之间的功率不平衡,从而维持稳定的直流母线电压。当开展系统分析计算时,可以将发电机组和含电力电子设备接入的负载等效为一个可控电流源[17],该电流源可正可负:为正时,表示传统发电机组的发电功率大于负载的需求功率,一般为负载突卸或螺旋桨出水工况;为负时,表示负载需求大于发电机组的发电功率,一般为高功率脉冲负载运行瞬间或负载突增工况。
由于本文的研究重点是多HESS 协同控制策略,为了更加聚焦,本文将电力系统中的电源、负载等进行了聚合处理,并将其视为可控电流源。因此,图1 可以简化为仅含HESS 和可控电流源的结构,如图2 所示,其中电池储能采用了文献[18]的通用等效模型,超级电容采用了文献[19]的一阶RC 模型。图2 中,连接储能单元的变换器为双向Buck-Boost 变换器,具有能量双向流动的功能,其中:Udc为直流母线电压,Ub,Usc和 Rb,Rsc分别为锂电池和超级电容的内部电压与电阻;Cb,Csc和Lb,Lsc分别为锂电池侧和超级电容侧变换器的滤波电容与电感,Rlb和Rlsc为相应的电感内阻;Cdcb和Cdcsc分别为锂电池和超级电容母线侧变换器的滤波电容;iib和iisc分别为锂电池和超级电容的输出电流;iob和iosc分别为锂电池端和超级电容端的变换器输出电流;io为母线电流;im为负载电流;Co为母线稳压电容;S1~S4为功率管。

图 2 混合储能系统的拓扑结构Fig. 2 Topology structure of hybrid energy storage system
1.2 多 HESS 协同控制架构
鉴于储能系统的分布式布置方案,为了提高控制效率,本文将采用多HESS 协同控制分层架构,如图 3 所示。图中,Pscn和 Pbn分别为第 n 个混合储能单元内超级电容与锂电池的输出功率。

图 3 控制方案的总体架构图Fig. 3 Overall architecture diagram of control scheme
1) 第 1 层为单个HESS 内部的功率分配层。该层的主要功能是根据HESS 的功率指令,在超级电容储能与电池储能单元之间进行合理分配,不仅要保证供能需求,还要使各储能单元运行于安全SOC 区间,从而提高各储能单元的使用寿命。该层主要包括下垂控制模块、传统内环稳压控制模块、考虑超级电容电压或SOC 的HESS内部功率再分配模块等。鉴于单个HESS 内部超级电容储能与电池储能的部署位置较为靠近,所以单个HESS 内部的功率分配层将采用主从控制模式,且在超级电容储能与电池储能之间配置低带宽通信网络。
2) 第2 层为多HESS 之间的功率分配层。该层的主要功能是监测各HESS 电池储能的SOC,并根据各HESS 的剩余可用能量进行功率再分配。鉴于多个HESS 之间的部署距离较远,而采用集中式控制方式对通信带宽和通信网络的要求太高,所以本层将采用分散式控制方式,即多HESS 之间不进行通信,仅以直流母线电压作为共同控制信号。
1.3 单个 HESS 控制建模
为了减少各HESS 之间的通信需求,其控制外环将采用下垂控制方法来实现功率的初始分配,而内环稳压控制则采用主从控制模式。图4所示为单个HESS 的控制结构框图,超级电容作为稳压主电源工作于电压源模式,而电池则工作于电流源模式,用以为超级电容提供能量支撑。其中,电池提供的功率由基于超级电容SOC 的功率分配模块决定,而限制器的作用是防止参考电流超过变换器的最大工作电流。

图 4 单个HESS 的控制结构框图Fig. 4 Block diagram of a HESS
图 4 中:UrefN,Ubus分别为直流母线的参考电压和实际电压;Iref_sci,isci分别为第 i 个 HESS 超级电容的参考电流和实际输出电流,其中 i=1, 2,···, n;Vbat_soc_adj为基于锂电池SOC 的单个HESS 的总输出参考电压调节量;ISC_soc_ref为基于超级电容SOC的功率分配模块计算得到的电池输出参考电流;Iref_bi,ibi分别为第 i 个 HESS 锂电池的参考电流和实际输出电流;dbi和dsci分别为锂电池和超级电容相应的DC/DC 变换器控制信号;iDCi为第i 个HESS 的DC/DC 变换器母线端输出电流之和,其计算公式为

式中:iDCbi和 iDCsci分别为第 i 个 HESS 锂电池和超级电容的DC/DC 变换器母线端输出电流。
1.3.1 外环下垂控制
V-I 下垂控制是目前广泛应用的一种分散式控制方法,仅利用本地信息即可实现分布式电源之间的协调控制,可靠性强,不易受到通信的影响。因此,为最大程度地实现各个HESS 的自治控制,并增强系统可靠性和“即插即用”能力,本文将采用下垂控制方式实现各个HESS 的功率分配。
V-I 下垂控制的计算公式为

式中:Uref为下垂控制修正之后的DC/DC 输出电压给定值;kv为下垂系数;io为母线实际电流。
其中,

式中:Uomin为直流母线电压的稳态最低值;Iomax为DC/DC 允许输出的最大电流值。
对于采用V-I 下垂控制方法的多个DC/DC 变换器(忽略线路阻抗),其输出电流关系如式(5)所示。由此可见,稳态时各DC/DC 变换器的输出电流ioi与下垂系数kvi成反比。

1.3.2 内环稳压控制
超级电容作为电压源,其控制结构包含下垂控制外环和电压电流双闭环,如图5 所示,其中Iref_sc,isc分别为超级电容的参考电流和实际输出电流。
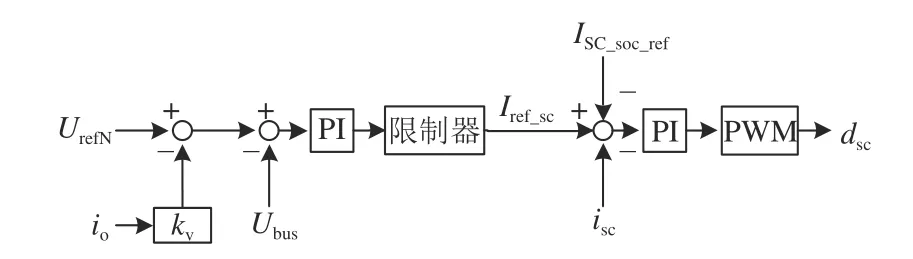
图 5 超级电容控制结构图Fig. 5 Control structure diagram of super-capacitor
锂电池储能作为电流源的主要功能是采用电流环跟随功率分配控制器的电流指令,其控制结构较为简单,如图6 所示,其中ib为锂电池的实际输出电流。

图 6 锂电池控制结构图Fig. 6 Control structure diagram of lithium battery
1.3.3 基于超级电容SOC 的HESS 协同功率分配
为了避免电池储能装置过充、过放以及频繁充放电,本文将采用基于SOC 分层的自适应控制策略。根据超级电容储能单元的SOC 水平,将其划分为图7 所示的不同运行区间,通过对不同区间设计不同的函数表达形式,实现不同SOC 水平下的储能单元充、放电控制。图7 中:SOCsc_max,SOCsc_min,SOCsc_high,SOCsc_low分别为超级电容允许的最大荷电状态、最小荷电状态、充电限制荷电状态门限值及放电限制荷电状态门限值。在一阶RC 超级电容模型中,由于超级电容SOC 与其电压之间的关联较为紧密,且超级电容端的电压检测相对容易,故对于超级电容而言,可以认为检测端电压与检测SOC 的效果相同。

图 7 储能单元的SOC 状态限制分类Fig. 7 SOC restriction classification of energy storage
当超级电容储能单元位于自由充、放电区域时,电池储能单元为备用状态。当超级电容储能单元位于充/放电限制区域时,其充/放电功率将会受到限制;同时,当接近充电门限值SOCsc_high和放电门限值SOCsc_low时,充/放电的功率限制将逐渐严苛,直至不允许充/放电为止,而其不足的功率将由电池储能提供。
与基于SOC 分层的自适应控制策略相对应,基于超级电容SOC 功率分配模块的数学模型为

式中,SOCsc为超级电容的荷电状态值。
通过检测母线电压与空载额定母线电压的偏差值,即可明确充、放电状态 Vdif:如果 Vdif>0,即表示储能单元处于充电状态;如果Vdif<0,则表示储能单元处于放电状态。其中:

经过功率分配调节之后,超级电容和锂电池的参考电流Iref_sc*和Iref_b*分别为


2 基于电池 SOC 的多 HESS 协同功率分配
多HESS 协同控制应实现以下目标:1)无论初始接入的储能容量、SOC 水平、变流器功率等是否相同,必须保证接入电网的所有储能单元不过充、不过放;2)保证不同SOC 可用区间的储能单元公平地参与系统协调控制,即各储能单元的实际充放电电流应综合考虑其变流器能力、储能可用SOC 范围等因素。
在舰船综合电力系统中,受舱室空间的限制,各HESS 的容量规模不一定完全相同,因此有必要在充、放电过程中对各HESS 进行动态功率调节。HESS 的主要能量由电池储能提供,而超级电容的能量则由电池储能进行动态补充,故可认为电池储能SOC 即为HESS 的SOC。因此,为了充分发挥各HESS 的能力,提高其循环使用寿命,本文将在多HESS 协同控制层也采用基于SOC分层的自适应控制策略,具体过程如图8 所示。图中:SOCbat为锂电池荷电状态;SOCbat_max,SOCbat_min,SOCbat_high,SOCbat_low分别为电池储能允许的最大荷电状态、最小荷电状态、充电限制荷电状态门限值及放电限制荷电状态门限值。该模型较为简单,各模式之间的切换较为顺畅,且不会因切换动作而导致母线电压的波动。
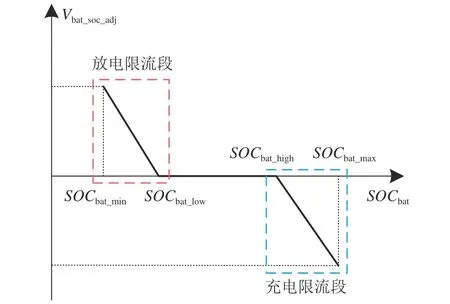
图 8 分段线性化调节模型Fig. 8 Piecewise linearization adjustment model
与基于SOC 分层的自适应控制策略相对应,基于电池SOC 功率分配模块的数学模型为

式中,K 为比例放大增益,由变换器的最大功率和系统对其调节能力的具体要求而定,一般为母线电压允许的可调电压范围。
基于安时积分法,即可计算电池的荷电状态值:

式中:SOCb为实时荷电状态;SOCb0为初始荷电状态;T 为总运行时间;μ为充放电效率;t 为积分时间变量。
3 仿真分析
基于PSCAD/EMTDC 仿真平台,在图2 所示系统拓扑结构中的同一直流母线上布置2 个HESS,每个HESS 包含 1 组超级电容和 1 组锂电池,系统负载为可控电流源,具体参数如表1 所示。需注意的是,为了能在短时的仿真分析中看出效果,表1 中并未体现超级电容和锂电池在储能方面的巨大差距,但在实际应用中,电池储能的容量一般为兆瓦时级,而超级电容储能一般不大于10 kWh 级。由于超级电容的寿命更长、充放电范围更大,但储能容量较小,为防止超级电容在短时间内过充/过放而锂电池却来不及反应,所以本文设定超级电容的自由充放电区域小于锂电池。在仿真过程中,超级电容和锂电池的最小荷电状态、最大荷电状态、放电限制荷电状态门限值、充电限制荷电状态门限值分别设为50%,75%,57%,62%和53%,70%,57%,65%(该数据仅可在短时仿真中验证本文控制策略的有效性,若要获取具有实用性的参考数据,则应将充、放电限定区域予以适当放大)。为了检验本文所提策略的可行性,将传统的低通滤波法作为对照组进行了比较。

表 1 仿真参数Table 1 The simulation parameters
3.1 工况1:舰船高能负载投切
该工况旨在模拟分布式多HESS 在应对舰船高能负载投切时的响应,其负载曲线如图9 所示:第 10 s 时,高能负载 A 投入,负载电流突变至 125 A;第 25 s 时,高能负载 A 切出;第 50 s 时,高能负载 B投入,负载电流突变至150 A。

图 9 负载曲线(高能负载)Fig. 9 Load curve (high energy load)
图10 所示为母线电压的仿真结果。由图10可以看出,2 种控制方法都可以较好地应对高能负载投切所导致的母线电压偏移,即两者对电压波动的稳定能力没有明显差异。
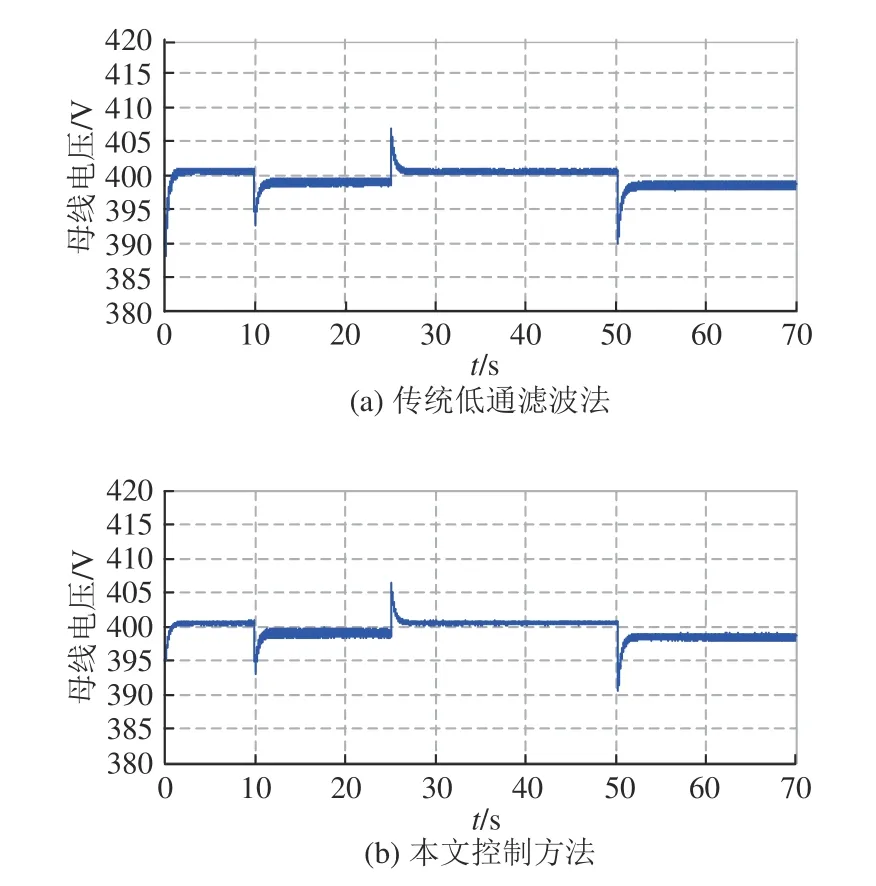
图 10 母线电压(工况1)Fig. 10 Bus voltage (case 1)
图11 所示为储能单元SOC 的仿真结果,其中 SOCsc1,SOCsc2,SOCb1,SOCb2分别为 1,2 号超级电容和锂电池的荷电状态值。由图11(a)可知,在传统低通滤波法控制下,同一类型储能单元SOC 将随着HESS 的运行而逐渐发散,从而导致个别储能单元的过充/过放,甚至提前退出运行,最终影响系统的调节能力和稳定性。由图11(b)可知,在基于超级电容SOC 的单个HESS 内部功率分配和HESS 之间功率均衡策略的作用下,同一类型储能单元SOC 经过自由充放电区域的发散之后,将在充放电限制区域中逐渐趋于一致,从而避免个别储能单元的过充/过放。

图 11 储能单元SOC(工况1)Fig. 11 SOC of energy storage unit (case 1)
图12 所示为储能单元输出功率的仿真结果,其中Psc和Pb分别为混合储能单元中超级电容和锂电池的输出功率。由于锂电池的循环寿命较低,故在满足系统总体需求的前提下,应尽量降低锂电池的充放电深度和工作模式变换次数,以延长其使用寿命。根据图12(a)和图12(b)的对比结果:在传统低通滤波法控制下,锂电池始终要承担一部分功率,这将增加锂电池的充放电深度;而本文以超级电容的SOC 作为控制指标,仅在超级电容可用容量不足的情况下才会调用锂电池,故可有效延长锂电池的使用寿命。

图 12 储能单元输出功率(工况1)Fig. 12 The output power of an energy storage unit (case 1)
3.2 工况2:随机波动
该工况旨在检验分布式多HESS 对随机波动的响应能力。此处的随机波动主要源自舰船的推进负载。在航行过程中波浪力的影响下,会出现较大的推力和功率缺失;同时,高速运转的螺旋桨与水流之间的相互作用也会导致母线电压的波动,而这种波动通常是随机的。图13~图16 所示分别为负载的随机波动曲线、母线电压的变化曲线,以及超级电容和蓄电池储能单元SOC 的变化情况及功率响应曲线。
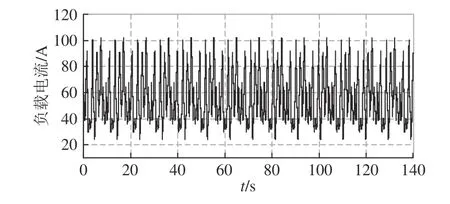
图 13 负载的随机波动曲线Fig. 13 Random fluctuation curve of load

图 14 母线电压(工况2)Fig. 14 Bus voltage (case 2)

图 15 储能单元SOC(工况2)Fig. 15 SOC of energy storage unit (case 2)
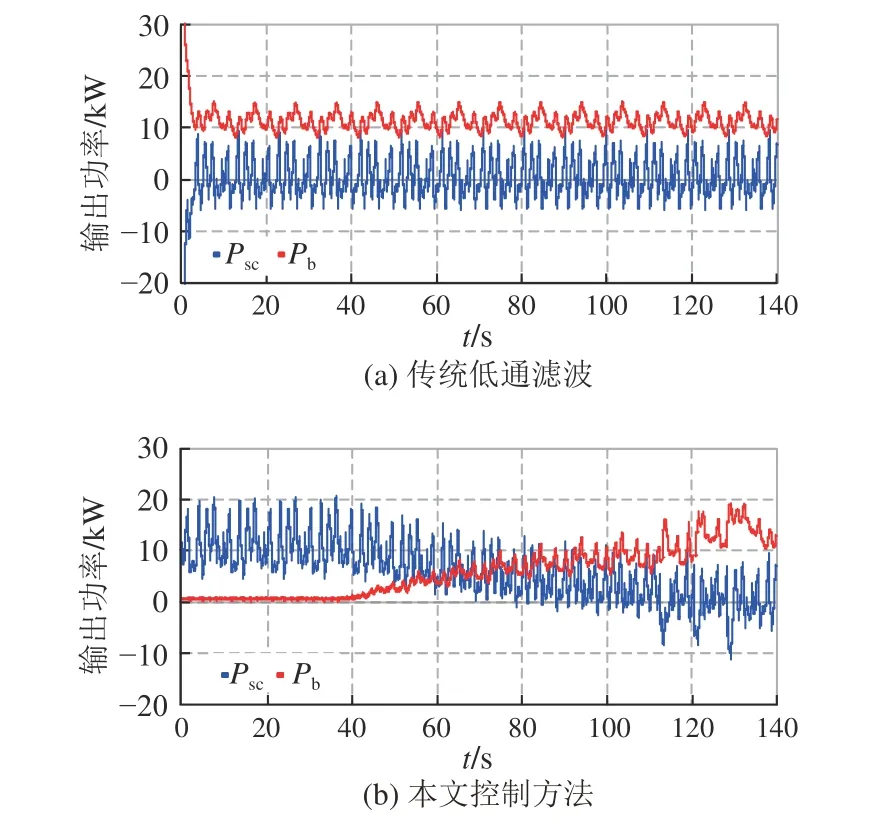
图 16 储能单元输出功率(工况2)Fig. 16 The output power of an energy storage unit (case 2)
从图14 所示的母线电压变化曲线可以看出,2 种控制方法的稳压能力差异不明显。图15 表明,本文控制方法可以使储能单元的剩余容量基本趋于一致,从而保持多HESS 的调节稳压能力。由图16 可知:低通滤波法将随机波动分解为低频和高频部分,但在舰船实际航行过程中,低频扰动相对于高频扰动更为频繁,这就表示锂电池需要承担更多的功率,最终将影响其使用寿命;而本文控制方法仅在超级电容能力不足时才调用锂电池,且超级电容电压不会突变,故其SOC的变化较为缓慢,这就使得以超级电容SOC 为出力指标的锂电池输出更加平滑,同时还能降低充放电模式的变换次数。
以上仿真结果主要检验了多HESS 的放电响应特性。但在舰船航行过程中,由于舰船动力系统的惯性,实际上其功率调节较为缓慢,往往会出现发电量大于用电量的问题,这就需要通过储能来吸收这部分多余的电量。图17~图19 所示为多HESS 在充/放电结合环境下的响应特性。

图 17 母线电压(充/放电工况)Fig. 17 Bus voltage (charge and discharge conditions)
由图17 可见,母线电压在充/放电模式变换时产生了些许偏差,但总体仍处于2.5%的偏移允许范围之内。由图18 可见,在本文控制方法的调节下,超级电容SOC 控制在上限和下限之间,且基本维持了2 个超级电容单元SOC 的一致性。从图19 中可以看出,无论是充电还是放电,锂电池都只在超级电容受限时工作,这在保证多HESS 调节能力的同时,也延长了锂电池的使用寿命。因此,本文控制方法在充/放电结合工况下也具有可行性。

图 18 储能单元SOC(充/放电工况)Fig. 18 SOC of energy storage unit (charge and discharge conditions)

图 19 储能单元输出功率(充/放电工况)Fig. 19 The output power of an energy storage unit (charge and discharge conditions)
4 结 语
针对舰船综合电力系统多混合储能协同控制问题,本文提出了一种考虑SOC 的多HESS 分层动态协调控制策略和储能单元SOC 分层控制算法。该方法拥有较好的母线电压稳定能力,相较于传统低通滤波法,该方法可以依据不同储能单元的自身容量配置来自适应调节各单元出力,以保证各储能单元SOC 始终处于安全运行区间并保持相对一致,不会造成因个别单元过充/过放而提前退出运行,故可提高多HESS 的可靠性。同时,只有超级电容受限时才会调用锂电池参与调节,这可降低锂电池的充/放电深度和模式变换次数,故能有效延长锂电池的使用寿命。此外,当各HESS 配置不相同时,本文控制方法仍然可以有效运行,故具有较强的鲁棒性。
