基于聚乙烯醇薄膜的石英音叉湿度传感器设计
2020-12-15孙明晓
徐 军,杨 帆,孙明晓
(哈尔滨理工大学自动化学院,黑龙江哈尔滨 150080)
0 引言
湿度传感器是一种可以将环境中湿度信息转换成电信号的装置,通常由湿敏元件组成,在工业生产、农业、航天以及人们日常生活中具有广泛应用[1]。但目前常见的测湿元件受空气中水蒸气影响,长时间工作会导致感湿材料与传感器之间腐蚀老化,如果在工业生产过程中没能及时对湿度参数进行检测,将严重影响仪器设备正常运转。因此,研制一种精度高、可靠性强、抗干扰能力强的湿度传感器是十分必要的[2]。
韩东祥等通过对石英音叉理论计算和有限元分析,实现了对温度参数的精准测量,并进行温度敏感元件的加工与测试[3];周晓峰等通过将纳米氧化锌薄膜依附在石英音叉表面制备了湿度传感器,在30%~80%相对湿度范围内,温度测量灵敏度达到了50 Hz/%[4];Jungchul Lee等通过动态掩膜光刻的方式将水凝胶固定在石英音叉表面,使得传感器在28%~55%相对湿度范围内,温度测量灵敏度达到了2.8 Hz/%[5]。除了利用石英音叉检测温湿度,它也被利用在力敏传感器[6]、微显微镜[7-8]等多种检测领域。
在湿度传感器研究中,董鹏等使用聚酰亚胺湿敏材料制作了一种加热式电容湿度传感器,灵敏度在0.219 5 pF/%[9]; 章丹等采用聚酰亚胺湿敏材料设计了一种基于LCP衬底的柔性湿度传感器,灵敏度达到0.09 pF/%[10]。
通过以上方式进行湿度参数检测时,虽然具备相应的精度与要求,但仍存在以下不足:
(1)石英音叉谐振的最佳模态受音叉本体的长度参数影响较大,如果忽略这些影响,音叉在进行谐振时其频率存在较大误差;
(2)常见的感湿载体是电容,而电容与感湿材料之间腐蚀老化和脱落,且随着时间的推移灵敏度越来越低,稳定性较差。
前期研究设计了石英晶体新切型和石英音叉结构,使石英音叉具备较高的频率温度参数和机电耦合系数,实现了对温度参数的高精度测量并进行实际环境的测试[11-13]。本文在此基础上,为了得到更好的振动模型,对石英音叉结构进行进一步的优化分析;并采用聚乙烯醇(polyvinyl alcohol,PVA)作为感湿材料涂覆在石英音叉表面设计出一种湿度传感器。
1 理论分析与传感器设计
1.1 石英音叉振动模态的有限元分析
石英晶体的谐振频率变化与负载质量变化关系由德国物理学家Sauerbrey首次提出[14],方程可简化为
(1)
式中:f0为石英晶体的基频;A为电极面积,m2;ΔM为质量变化,g;Δf为频率变化,Hz。
对石英音叉振动模态进行有限元分析主要分为3部分:
(1)前处理,包括选区单元类型、材料参数、划分网络;
(2)求解,进行石英音叉的模态、谐响应分析;
(3)后处理,通过求解过程,获得结果。
在分析中,电层采用SOLID226单元,石英晶片的杨氏模量为7.87×10-10N/m2,密度为2 650 kg/m3;金电极的杨氏模量为92.5×10-10N/m2,泊松比为0.42,密度为18 500 kg/m3[15]。
对石英音叉共划分12 384个三维六面体元素网格,59 340个节点,并设定石英音叉的基座为固定端作为约束的条件,以模拟实际的石英音叉谐振器。在对音叉振动分析中计算了压电悬臂梁结构的前六阶模态,其振型如图1所示,仿真结果如表1所示[16]。

(a)一阶 (b)二阶 (c)三阶 (d)四阶 (e)五阶 (f)六阶图1 石英音叉前六阶振动模态

表1 前六阶振动模态仿真结果
通过表1可以看出,理论分析的频率值是指在未考虑剪切变形和转动惯量对压电石英悬臂梁弯曲振动的影响时的弯曲振动频率,在前期进行温度与石英音叉谐振频率影响的研究下通过式(2)计算所得,与实验数据的偏差为3.7%。可以看出,仿真结果基本上符合压电悬臂梁振动的实际情况,验证了本文所推导的压电悬臂梁弯曲振动频率公式的正确性。
(2)
式中:l为音叉臂的长度;w为音叉臂的宽度;ρ为石英晶体的密度;s′22柔性顺度系数;βn=n-1/2。
1.2 聚乙烯醇材料感湿性分析
文中基于石英音叉的湿度传感器是通过感湿材料质量变化与石英音叉谐振频率变化建立联系。PVA(分子式[C2H4O]n)是一种稳定的有机聚合物,由于其分子结构中含有大量的亲水性羟基(-OH),而羟基对空气中的水分子极为敏感,在作用中由于氢键的断裂和重组可以快速地吸附、脱附水分以达到周围环境湿度的平衡[17]。正是利用PVA薄膜的感湿特性,将其涂覆在石英音叉表面后,通过外界湿度的变化导致PVA薄膜吸收或解析水分后发生质量变化进而使得石英音叉的谐振频率发生偏移,并经过实验仿真得到频率与湿度之间的对应关系。
1.3 传感器设计
1.3.1 湿度传感器制备
首先采用电子天平(0.001 g)量取1 g聚乙烯醇(PVA),加入到去离子水和无水乙醇3∶1(19 g)比例的溶液中,并将上述溶液放置在恒温箱60 ℃环境中搅拌40~50 min,随后将温度提升至80 ℃搅拌1 h,最后将溶液放置在室温中直至PVA完全溶解[18]。恒温箱及设备环境如图2所示。
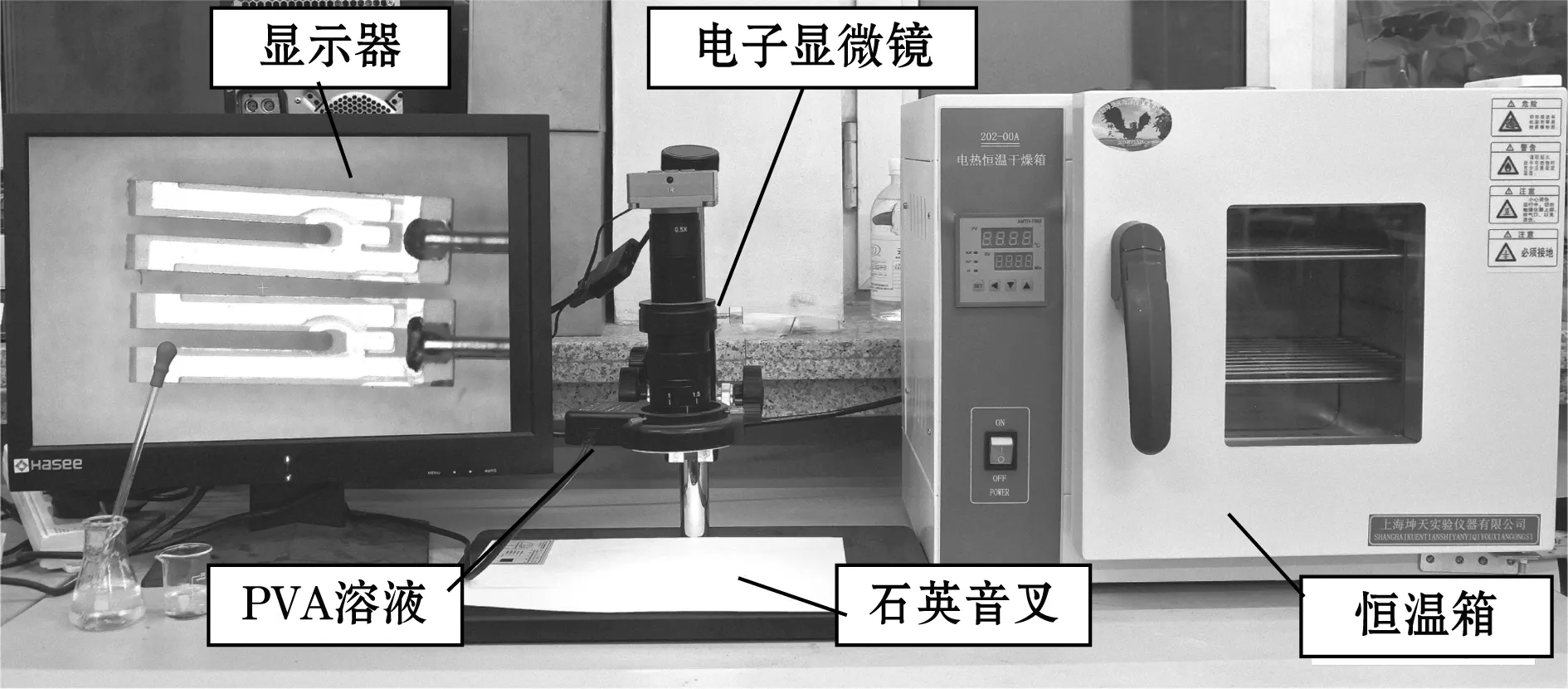
图2 恒温箱及设备环境
使用带有刻度的胶头滴管吸取上述配好的溶液0.1 mL左右,采用点涂法将溶液涂覆在音叉表面,放置在恒温箱60 ℃下烘干12 h,进行最终感湿材料的固化过程。涂覆感湿材料的音叉对比如图3所示。

图3 石英音叉涂覆感湿材料前后对比
传感器整体采用铝制外壳设计。通过激光焊接将石英音叉与引出的电极银线连接。传感器三维结构模型与外壳如图4所示。
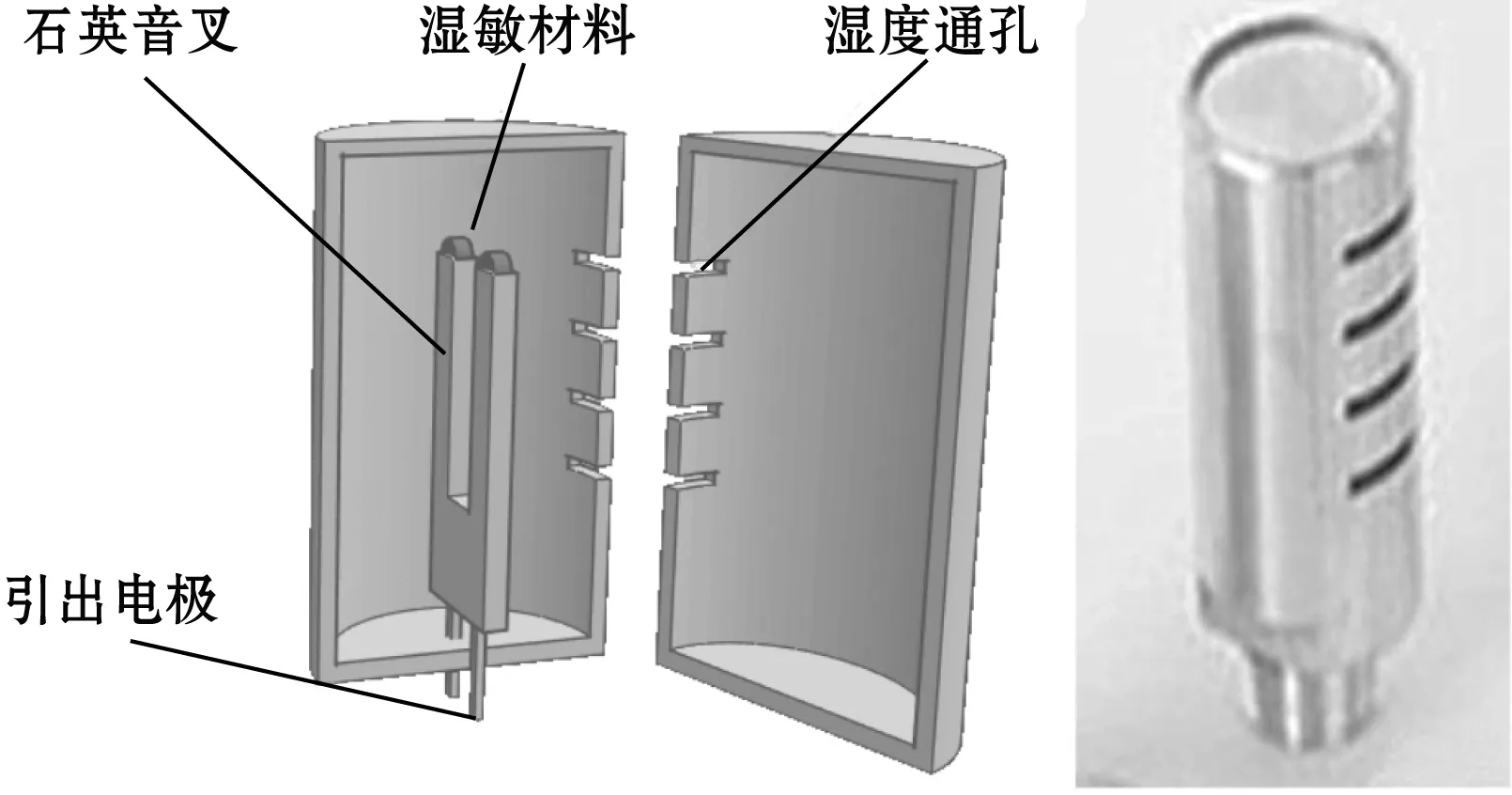
图4 传感器示意图
1.3.2 测试系统搭建
音叉结构示意图与信号调理电路如图5所示。在进行石英音叉频率获取时,交变的电压激励使石英音叉臂反向共振,当激励频率与谐振频率相同时,音叉臂产生最大位移,此时音叉臂上产生电势差,通过谐振器的电流最大。但由于石英音叉谐振器电极寄生电容和电极引线的分布电容影响,当有电流通过且激励频率不等于谐振频率时,这部分电容会存在一定的阻抗,这也是导致石英音叉频率响应特性曲线不对称的主要原因。

图5 音叉结构示意图与信号调理电路
为了避免这种影响,通过设计运算放大器使石英音叉信号与补偿电容的相位差为180°,并调节补偿电容值使其与造成影响的静态电容大小相等、方向相反,以抵制静态电容所造成频率特性不对称的影响。电容补偿前后频率响应特性曲线如图6所示。
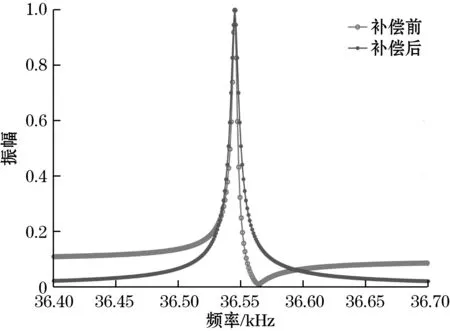
图6 电容补偿前后频率响应特性曲线
湿度敏感特性测试系统由湿度发生器、信号调理装置、频率计数器及计算机组成,系统示意图如图7所示。将湿度传感器放置在独立的恒湿槽中,湿度的频率信号经过信号调理装置进行去噪、放大后,送入频率计数器,最终到计算机中进行后续计算处理。在实验中通过测试平台调节温度在室温20 ℃,相对湿度范围在25%~85%。
2 结果与分析
图8为传感器从高湿度环境到多种低湿度环境下的频率响应特性。从高湿到低湿环境,再从低湿到高湿环境的曲线基本对称,但由于感湿材料的影响,为达到低湿度状态需要较长时间的水分平衡,所以传感器的脱附时间大于吸附时间。

图8 不同相对湿度下传感器的频率响应特性
涂覆感湿材料后的石英音叉在室温20 ℃下的谐振频率在37.244 kHz左右,传感器湿度与频率之间变化关系如图9所示。

图9 湿敏特性曲线
图9表明,石英音叉的谐振频率随湿度增加呈降低趋势;通过对湿度数据进行拟合后呈现非线性关系,如式(3)所示,拟合度较为显著。
f(h)=37 220+1.362h-0.023 75h2,R2=0.987 3
(3)
式中:h为相对湿度参数,%;f(h)为石英音叉的谐振频率,Hz;R2为拟合系数。
根据湿滞测量方法测得传感器的湿滞特性曲线如图10所示。从图10湿度下降的湿滞回线可以看出,传感器脱湿环节滞后于吸湿环节,湿滞为1.45%。
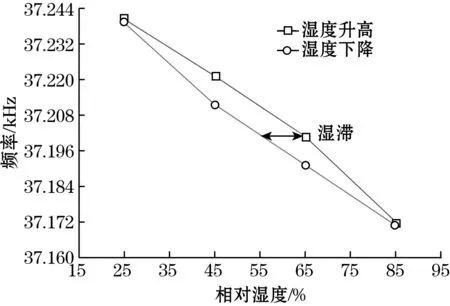
图10 湿滞特性曲线
在25%~85%的相对湿度范围内测量了传感器的响应时间与恢复时间,如图11所示。从图11可以看出,随着湿度的提高谐振频率逐渐降低,在湿度测量范围内,频率共偏移了70 Hz左右。同时,湿度传感器在不同湿度情况下,其响应时间在70 s左右,恢复时间在105 s左右;灵敏度在-1.17 Hz/%左右。
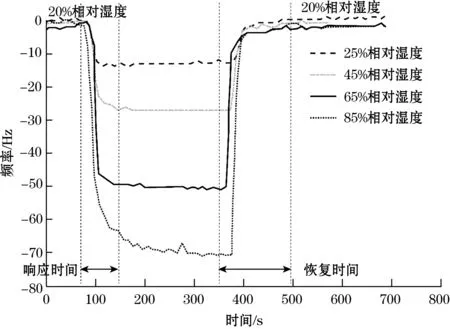
图11 响应时间与恢复时间示意图
3 结论
本研究基于聚乙烯醇材料的感湿特性与石英音叉的谐振原理,提出一种针对高精度湿度参数的检测方法。凭借石英音叉涂覆感湿材料后良好的湿敏特性,实现了湿度传感器的设计。
(1)通过有限元理论分析并找出石英音叉结构最佳的振动模态,压电悬臂梁的长宽比对结构的振动形态影响较大,长宽比较大时,前四阶模态基本只呈现弯曲变形;当长宽比较小时,开始出现扭转变形。从谐响应曲线可以看出,当输入电压频率与谐振器频率相等时发生谐振。
(2)通过在石英音叉表面涂覆PVA感湿材料,结合试验数据总结了湿度参数与石英音叉谐振频率之间的对应关系,制作了湿度传感器。在25%~85%相对湿度范围内,湿度检测的灵敏度可达-1.17 Hz/%,湿滞为1.45%,响应时间和恢复时间在70 s和105 s左右。
