渤海湾典型人工鱼礁区域流场分布与海床泥沙起动特征
2020-12-13舒安平王梦瑶秦际平朱福杨
舒安平,王梦瑶,秦际平,王 澍,朱福杨
(1. 北京师范大学 环境学院 水沙科学教育部重点实验室,北京 100875;2.中国电建集团 中南勘测设计研究院有限公司,湖南 长沙 410014)
1 研究背景
近年来,我国渤海湾等近海海域受养殖空间超负荷、海洋捕捞强度高以及全球气候变化等因素的影响,导致海洋生态环境被污染、渔业资源遭受破坏[1-3]。建设海洋牧场可以促进渔业资源恢复、发展海洋经济,是合理开发利用渔业资源、保护海洋生态环境的重要举措[1,4-8]。投放人工鱼礁则是海洋牧场建设过程中采用的一种重要技术手段,合理的人工鱼礁建设有利于调整海洋产业结构,从根本上修复和改善海洋生态环境、优化渔业资源、促进海洋经济持续健康发展[7,9-10]。因此,对渤海湾人工鱼礁区域水流流动分布与海床泥沙起动特征进行分析,对人工鱼礁布设、评价实际海域人工鱼礁的环境功能和流场泥沙效应具有重要实际意义。
作为海洋牧场极其重要的建设内容之一,近三十年来人工鱼礁的社会、生态和经济等方面的价值越来越来越受到相关行业重视,一些专家学者已进行了有益的探索研究[7,9-10]。郑延璇等利用计算流体力学CFD软件,采用RNG k-ε湍流模型,研究不同来流流速(0.3、0.5、0.8 m/s)下星体型鱼礁模型的流场效应,分析了礁体投放方式与流场效应的关系[12];李晓磊等同样利用CFD软件,对定常流作用下方形鱼礁模型进行数值模拟,研究了礁体周围的三维涡结构[13]。Miao和Xie通过模拟波浪研究了水深对人工鱼礁水动力的影响,计算结果表明只有当水深与礁高的比值小于等于6.0时,水动力特征值才随着水深的减小而增大[14]。Düzbastil和Şentürk研究了波浪和人工鱼礁之间的相互作用,并在FLUENT软件中使用物理方程估算了阻力、拖曳力以及阻力系数。结果表明,部署在12~16 m以上水域的人工鱼礁与水流成45°和90°角时是稳定的。此外,海床坡度可能对人工鱼礁的设计重量有重大影响[15]。Woo等人提出了一种基于有限体积流量分析的韩国常用人工鱼礁阻力系数估算方法,其结果显示初始流速的变化并没有改变阻力系数,但来流与人工鱼礁方向夹角的变化对阻力系数的改变较显著[16]。Srineash和Murali则在水力实验中研究了用于保护海岸侵蚀的石笼箱型鱼礁上的波浪压力,得出了在定波浪气候下人工鱼礁的最佳配置[17]。Li Jiao等人用大涡模拟LES k-ε湍流模型对方形单体礁周围的上升流的强度和尺度进行分析,得到礁体不同结构的通透系数与礁体周围流场变化的数学模型,结果表明人工鱼礁周围上升流的流场效应达到最大时,单体礁高度与水面高度的比值为0.224[18]。现阶段对于人工鱼礁流场效应的研究大多集中在单体礁或双鱼礁组合的流场的水动力学特性的定性分析,尚缺乏流场量化及海床泥沙起动方面相关成果,特别是对二个以上人工鱼礁组合群对区域流场及泥沙效应的研究成果并不多见,需要进一步进行系统研究。
鉴于此,本文以渤海湾辽东湾区觉华岛近海人工鱼礁区域为研究对象,通过水槽模拟实验,并采用粒子图像测速系统(PIV)研究不同流速条件下单位人工鱼礁及不同间距的人工鱼礁组合群区域流场分布特别是上升流及背涡流流动分布特征。在此基础上,结合现场海床泥沙采样测试结果和实验模拟结果,探讨人工鱼礁区域海床泥沙起动特性,不仅为人工鱼礁优化布局方案提供重要技术支持,而且对优化鱼礁投放操作流程、减少鱼礁投放对海床泥沙扰动影响具有重要现实意义。
2 水槽实验概况
本次实验是在北京师范大学环境学院、水沙科学教育部重点实验室的多功能循环水槽中进行。实验过程中,通过多功能水槽提供不同流速的恒定水流作为水源条件,以位于渤海湾辽东湾区大型海洋牧场——觉华岛典型人工鱼礁(M型)区域为实验研究对象,并将拟投放的人工鱼礁群为原型进行比尺缩放,利用激光与高速摄像机等构成的PIV测量系统,拍摄并记录在不同工况下M型人工鱼礁单位礁区域的粒子运动图像,研究不同流速条件下、不同间距人工鱼礁群区域流场分布特征,进而结合现场采样的海床泥沙分析探讨海床泥沙的起动特点。
2.1 实验装置多功能水槽及PIV测量系统的结构示意图如图1所示。多功能水槽底部和侧面均由透明玻璃构成,水槽长25 m,宽0.8 m,高0.8 m;实验段长4 m,宽0.8 m。多功能水槽同时包括自动水位系统、自动尾门系统、流速量测设备,供回水控制过程通过变频器和电磁流量计的闭环来实现,可精确地实现恒定流的闭环控制和非恒定流的流量变化过程控制,控制准确精度高。实验所需的不同流量采用一台水泵供水、电磁流量计实时监测流量、变频器闭环控制水泵转速以调节输出流量的方式实现。可以在实验允许的较大与较小流量时同样的能够保持较高的调控精度。
PIV测量系统由激光发射器、高速摄像机、激光发射器、转换器及数据采集系统构成,如图1所示。

图1 多功能水槽及PIV测量系统结构示意
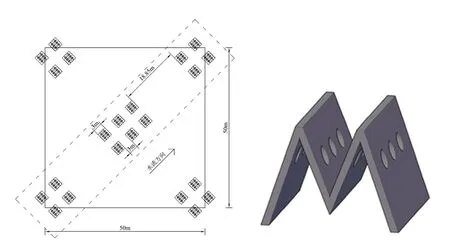
图2 M型人工鱼礁礁群原型布局及单体鱼礁原型示意
本实验所设置的M型单位礁群以渤海湾觉华岛近海区域拟投的放M型单位礁群原始设置(如图2所示)为基准,人工鱼礁群原型长、宽为50 m×50 m,沿水流方向礁群间距长18.85 m,M型单体礁原型尺寸:长3 m×宽3 m×高2.2 m,礁体厚度0.15 m,礁面圆孔半径0.2m,三角形内夹角为41°,鱼礁模型按照几何比尺50∶1进行模型设计,即实验模型中M型单体礁模型尺寸为长60 mm×宽60 mm×高44 mm×厚3 mm×圆孔半径4 mm,三角形内夹角为41°。模型鱼礁使用PVC有机玻璃材料制作,其中人工鱼礁群模型采用原型人工鱼礁群中沿水流方向对角线的三个分礁群构成,基于此设计单位礁由14个M型单体礁构成,每4或6个单体礁构成一个分礁群,以4+6+4的形式摆放,组合成单位礁群模型,礁群间距为377 mm,分礁群内两单体礁之间的间距为一倍礁长60 mm。
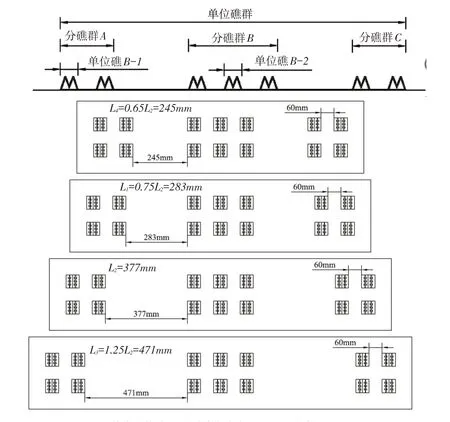
图3 单位礁构成及不同单位礁内间距的鱼礁布局图
2.2 实验条件设计按照渤海湾平均水深15 m及模型几何比尺50∶1缩小得出模型实验水深为30 cm,实验水体采用自来水。为了探究不同人工鱼礁群间距条件下的水动力学特征,本次实验在人工鱼礁群模型间距以拟投放鱼礁群L2=377 mm的间距为基准分别按照缩小25%和扩大25%进行缩放,即共设置了3种不同的人工鱼礁群间距条件:即L1=0.75、L2=283 mm、L2=377 mm、L3=1.25L2=471 mm。具体摆放方式如图3所示。每种间距均有3种不同流速,实验流速按照重力相似原则设计,即Frp =Frm,速度比尺应为νp∶νm=∶1。依据实际近海海域流速,选择3个实际流速vp分别为日常流速0.6 m/s、普通风浪流速1.2 m/s和较大风浪流速1.8 m/s,按速度比尺50∶1设定3个实验流速vm分别为0.085 m/s、0.170 m/s、0.257 m/s,即对应的实验流量分别设为20 L/s、40 L/s、60 L/s三种工况。综上所述共9组实验工况,详见表1。
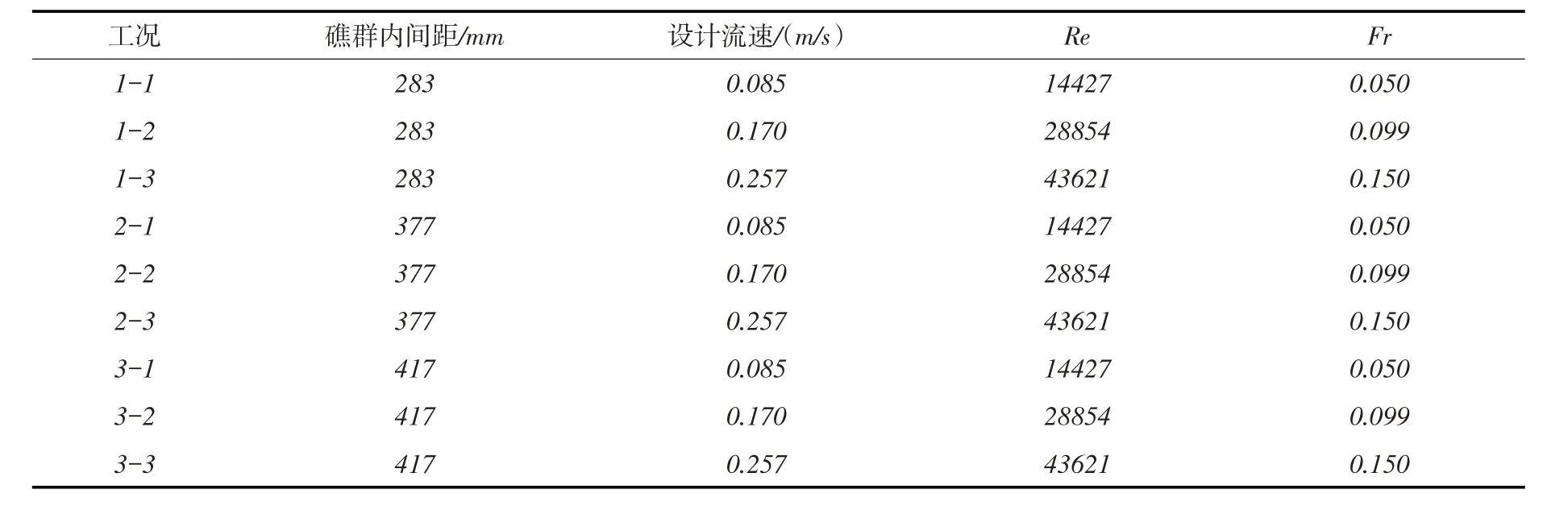
表1 水槽实验条件
为探究海床泥沙起动特性,可将实验结果按照相似比尺等比还原为实际的流场情况,以渤海湾区域本底调查的泥沙颗粒为研究对象,其颗粒级配如图4所示,泥沙样本的中值粒径约为d50=0.0175 mm,容重γs =1.83×103kg/m。
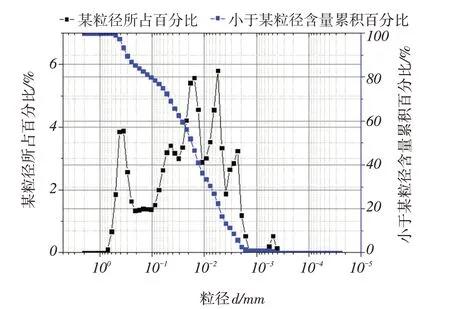
图4 海床泥沙颗粒级配曲线图
2.3 实验方法及内容实验流场采用PIV测试系统测量,其中示踪粒子采用水体中自然存在的杂质,实验光源采用激光,激光脉冲采用同步仪控制。
实验流程及方法如下:每组实验分准备及实施两个阶段,其中准备阶段主要是在实验段架设并调试CCD高速摄像机、关闭尾门并放水至30 cm、按设计在槽底摆放鱼礁等;实验实施阶段中首先打开阀门放水、调节流量,然后打开激光并使用高速摄像机以跨帧时间2700 μs的拍摄速度拍摄500帧的瞬时粒子运动图像,每帧图像包含A、B两个画面,两个画面之间的采集频率为15 Hz。由于高速摄像机能拍摄的最大画面(30 cm×20 cm)较小,故选择分段获取人工鱼礁流场图像。当前一拍摄点的粒子运动图像采集完成后,关闭激光,将激光发射器及相机沿水流方向平移至下一观测点位上进行新一轮粒子运动图像采集,此过程中需注意两次拍摄的粒子运动画面需要有部分重合区域,以便于后期图像处理。重复以上操作至该工况下单位礁粒子运动图像整体拍摄完毕,随后观测设备,该组次实验停止。实验流程图如图5所示。
实验结束后,将同一工况下的不同观测点的速度矢量图进行拼接,最终对全部实验资料进行整理、对比分析得到9组次实验流场分布图,详见图5。
3 人工鱼礁区域水流流场分布特征
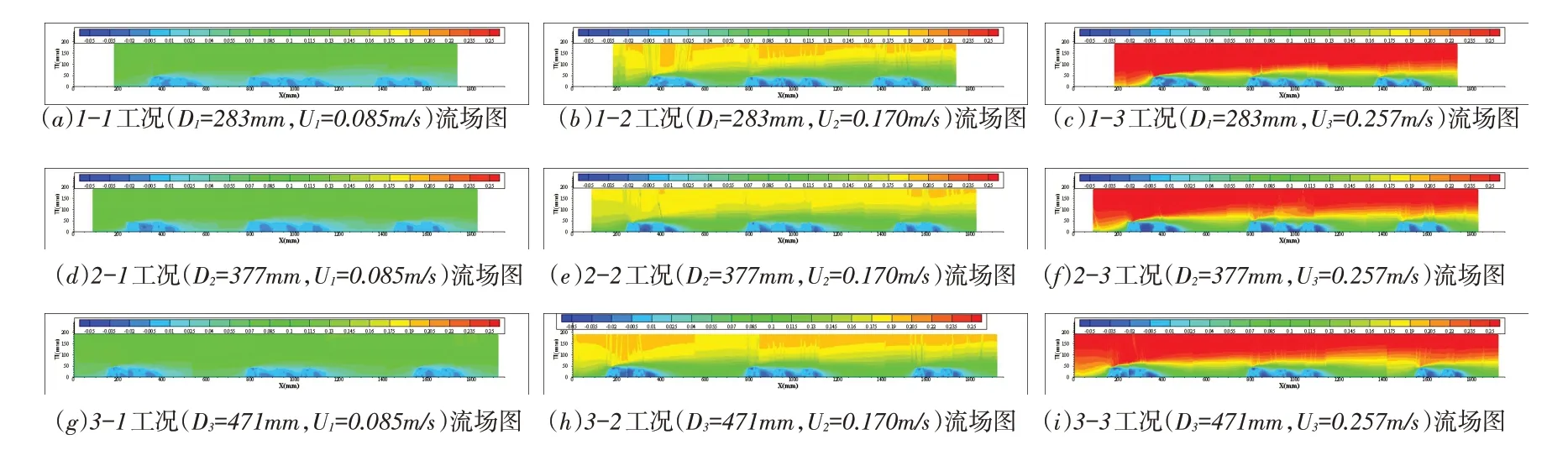
图5 不同工况下人工鱼礁群纵流场分布

图6 不同工况下人工鱼礁群上升流分布
3.1 沿程流态变化特点由图5可见,在水槽实验观察到的实验现象显示水流在第一个迎流单体礁A-1前方约3倍礁高处出现抬升,在第一个单体礁迎流面顶端有一个固定的流动分离点,该点周围流速急剧增加且在该点附近形成一个小的涡旋区,同时在该鱼礁迎流面底部也会出现一个小的涡旋区,此现象在每个分礁群的第一个单体礁的迎流面均出现,但越靠后该现象越不显著。而单位礁群内和礁群后则形成一个流速相对来流速度较缓的缓流区。
3.2 上升流区流场分布投放人工鱼礁后,海底局部水流受阻而抬升,形成上升流。上升流能够使区域的盐分、营养物质、温度等进行再分配,上升流区通常也是饵料、浮游生物的密集区,因此,上升流区域的大小通常都作为衡量鱼礁集鱼功能的重要指标。根据黄远东等提出的上升流的界定标准,本实验将水平流速为0时,垂向流速与来流速度之比大于或等于5%的区域判定为上升流区[18]。
图6为不同工况下上升流区域分布图,表2为不同工况下上升流特征值的变化情况,结合图7和表3可以看出上升流区主要集中于每个分礁群第一个单体礁迎流面上方的流动分离点处,沿水流方向,后方礁体产生的上升流区的规模逐渐减小,上升流最大区出现在第一个迎流单体礁的前方。各个分礁群内两个相连单体礁之间有小范围上升流区的分布,但由于区域面积过小,相较可忽略不计。总体而言,随着人工鱼礁群内间距的增加,上升流区及其各项特征值呈现先减小再增加趋势;随着流速的增加,上升流区域及其各项几何特征值则呈现增加的趋势。

表2 不同工况下上升流几何特征值的比较
3.3 背涡流区流场分布海底水流受到鱼礁阻流作用在礁后形成了流速缓和,流态复杂多变的涡流区,通常涡心处流速最小。由于涡流区流速较缓,使其在潮流较强时成为鱼类适宜的遮蔽场所,同时涡流还会使浮游生物、甲壳类和鱼类等进行聚集。将在鱼礁背面或内部形成的涡旋状流场定义为背涡流,而且将背涡流流速和空间尺寸作为衡量人工鱼礁流场效应的主要指标之一。
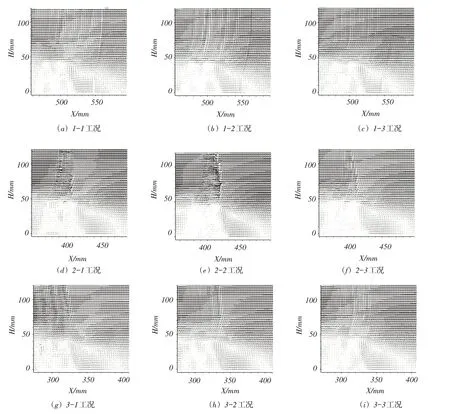
图7 不同工况分礁群A后背涡流分布
通过观察实验现象,发现背涡流主要出现在各分礁群两个单体礁之间及分礁群尾部单体礁的背部,两个单体礁内背涡流沿水流方向分布情况如下:通常单体礁A-1后会形成一个大背涡流,随着流速的增加,背涡流出现位置升高;单体礁B-1背部出现1-2个涡流不等;单体礁B-2及单体礁C-1背部均出现2个小背涡流,两个背涡流通常左高右低、左大右小。而各个分礁群背部均有1个背涡流,以分礁群A尾部的背涡流形态最为清晰,因此着重分析该区域背涡流。图7为不同工况分礁群A后背涡流区域,结合图5、图7及表3可知,礁后面均出现了比较明显的旋涡区域,相同人工鱼礁群间距条件下,分礁群A图7不同工况分礁群A后背涡流区域流场分布图
后背涡流随着流速越大,背涡流特征值有增大趋势,但差异不明显;而针对背涡流的总面积,在相同流速下,随着人工鱼礁群间距的增加,其相应的背涡流域总面积有先减小后增加的趋势,但L1与L2间距下的总面积差距很小。
综上所述,在扩大25%鱼礁群间距,即L3=1.25L2条件下的上升流、背涡流各项特征值均大于其余两个间距的工况。因此建议渤海湾在投放人工鱼礁时,可适当将人工鱼礁群内部间距拉大,在相同的造价下,可增大的上升流、背涡流面积及人工鱼礁群影响面积,从而获得更多的海洋生物资源生产量。
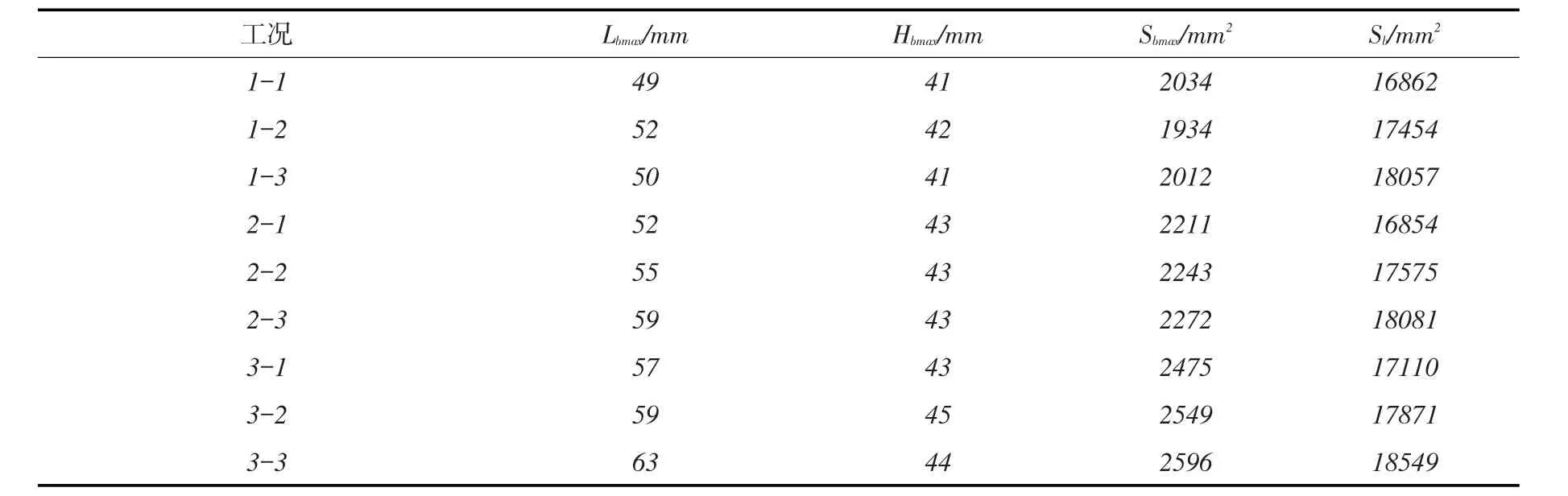
表3 不同工况下背涡流几何特征值的比较
4 人工鱼礁区域海床泥沙起动特点
4.1 海床泥沙颗粒粒径与起动流速关系泥沙颗粒的起动流速是泥沙颗粒起动的量化指标。采用张瑞瑾(1989)起动流速公式:

式中:h为水深;D为泥沙颗粒粒径;γs、γ分别为沙粒、水的容重。
渤海湾拟投礁区域的实际平均水深h=15 m,γs =1.83×103kg/m3,γ=1.0×103kg/m3,通过图4海床采样泥沙颗粒级配曲线图,结合式(1)可计算出采样泥沙在不同粒径下的起动流速的关系和该采样泥沙在不同流速下与颗粒的启动百分比的关系,计算结果分别如图8、图9所示。由图可见,当未放置鱼礁时,在日常流速条件下,即vp=0.6 m/s(对应实验流速为0.085 m/s)时,粒径在0.1046~0.0739 mm范围内的泥沙颗粒能够起动,仅占全部颗粒的21.48%,占比较低。从前述的流场分布特征分析可知,人工鱼礁投放后改变了区域流态及流场分布,在分礁群的前部会产生上升流,导致垂向流速增加;另一方面,在单体礁的背部产生背涡流,造成局部流速减小并产生回流,水流紊动加强,区域流场条件较鱼礁投放前发生了较大变化。因此,通过对比分析鱼礁投放前后的流场及紊动强度,发现人工鱼礁投放后在同样的来流条件下人工鱼礁区域海床近底的流速条件的改变引起紊动强度相应增大,会导致近底区域泥沙颗粒更容易起动。
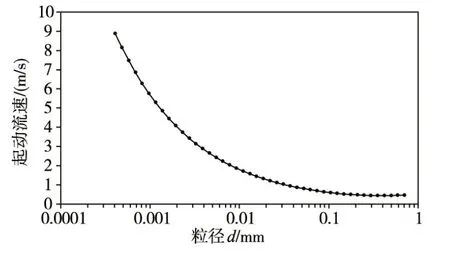
图8 采样泥沙不同粒径-起动流速关系
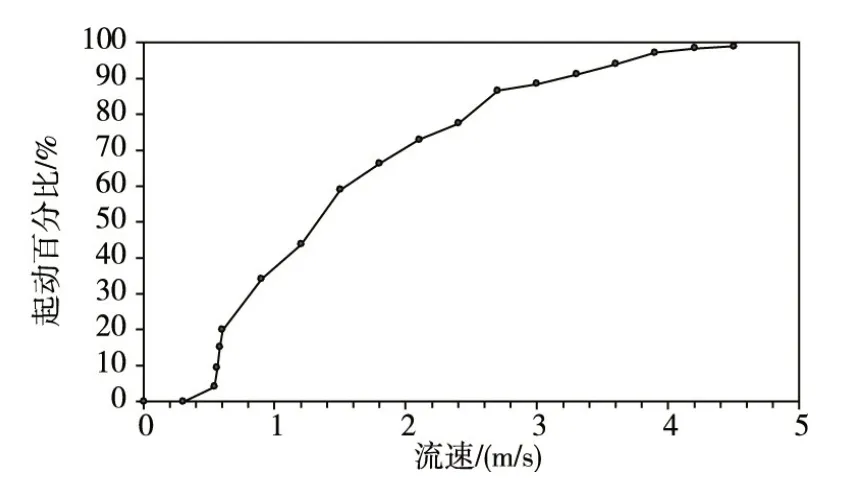
图9 流速与起动百分比关系
4.2 人工鱼礁投放后海床泥沙临界起动切应力的变化特点泥沙颗粒在水流作用下能否起动,主要取决于其受到上举力、拖曳力及水下重力的大小对比关系,而上举力系数、拖曳力系数与沙粒形状和沙粒雷诺数有关,最后得出的起动拖曳力公式即著名的希尔兹起动剪切力曲线可表述如下函数关系:

式中沙粒雷诺数

Cao等[20]根据对数匹配方法,对希尔兹关系曲线进行分段拟合为:

根据上式可知,计算临界起动切应力τc需先获取摩阻流速。摩阻流速可根据雷诺应力法、实测流速反算法以及湍流动能法等进行计算[21]。
雷诺应力法即将实测雷诺应力垂线分布延长至床面求得床面切应力,再求得摩阻流速。
实测流速反算法即当垂线上纵向流速分布符合对数流速分布关系(如图10如示)时,可由流速分布对数公式反推摩阻流速:
流速分布对数公式:

湍流动能法则根据近壁面总动能计算壁面切应力,再根据摩阻流速定义公式计算求得摩阻流速。计算过程如下:
将(9)带入(8)中可得:

式中:τc为泥沙颗粒起动临界剪切力;u*为摩阻流速;υ为水的黏滞系数;θ为希尔兹数;U为距床面y处的流速;κ为卡门常数,此处κ =0.41;A为积分常数;分别为纵向、垂向、横向紊动流速的均方值;c为经验系数,本文取值c=0.19[22]。
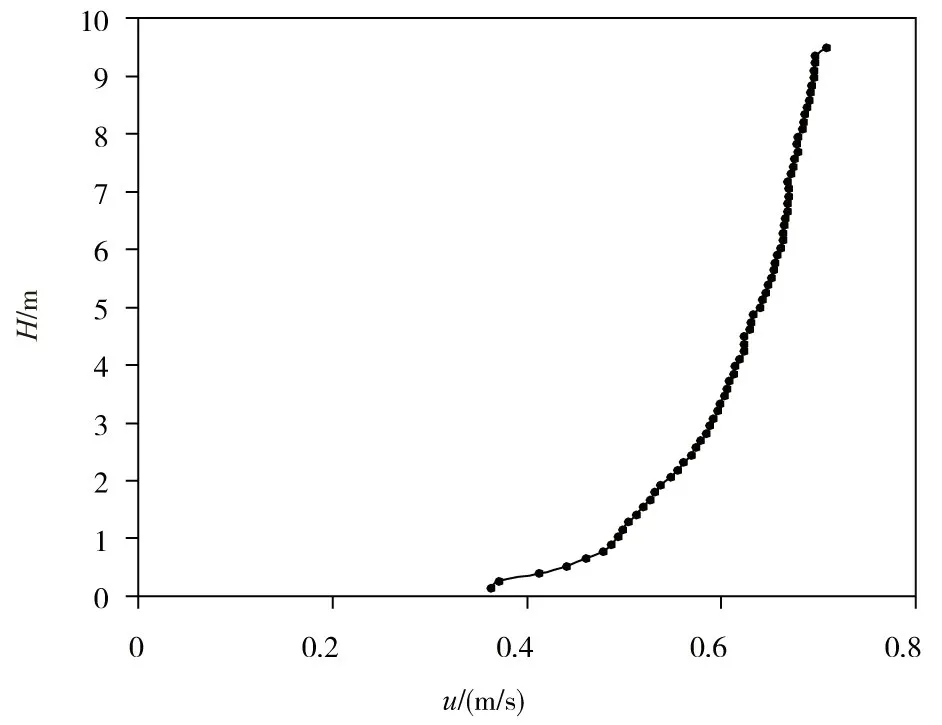
图10 投放人工鱼礁群前垂线流速分布
为了分析放置人工鱼礁群后海床泥沙起动变化特点,本文在来流平均流速为0.085 m/s(即海域实际日常流速0.6 m/s)条件下,将实验结果等比放大为实际值,假定加入采样泥沙,令D=d50=0.0175 mm,对比分析人工鱼礁放置前与原型人工鱼礁群工况(实验间距为377 mm)底面各点上的临界起动切应力。
当水槽内未放置人工鱼礁群时,垂线上纵向流速u的流速分布符合对数分布规律(见图10)。在此条件下,采用三种方法计算的摩阻流速值分别为:0.0217m/s(雷诺应力法);0.0201 m/s(实测流速反算法);0.0265 m/s(湍流动能法)。水的动力黏滞系数取1.31×10-6 kPa·s,求得沙粒雷诺数分别为:0.290(雷诺应力法);0.248(实测流速反算法);0.354(湍流动能法),将结果代入式(7)得临界起动切应力分别为:0.0022(雷诺应力法);0.00224(实测流速反算法);0.00209(湍流动能法)。
当水槽内部放置人工鱼礁群后,人工鱼礁群区域内,垂线上流速分布不满足对数公式,因此在计算放置后的底面各临界起动切应力时,采用湍流动能法计算摩阻流速,由此计算投放鱼礁前后临界起动切应力,计算结果如图11所示。图中人工鱼礁放置前底面各点临界起动切应力求解时采用的摩阻流速同样由湍流动能法计算得到。临界起动切应力越大意味着同一粒径下该点处的泥沙更不易起动。此外随着临界起动切应力急剧变化、即突起的部分放置单体礁的区域,计算结果表明,在投放鱼礁后,整个人工鱼礁群前部及各个单体礁内部较投放前临界起动切应力明显增高,泥沙更不易起动;相邻两个单体礁内部及分礁群背部的各点的临界起动切应力较投放鱼礁前减小,更容易起动。
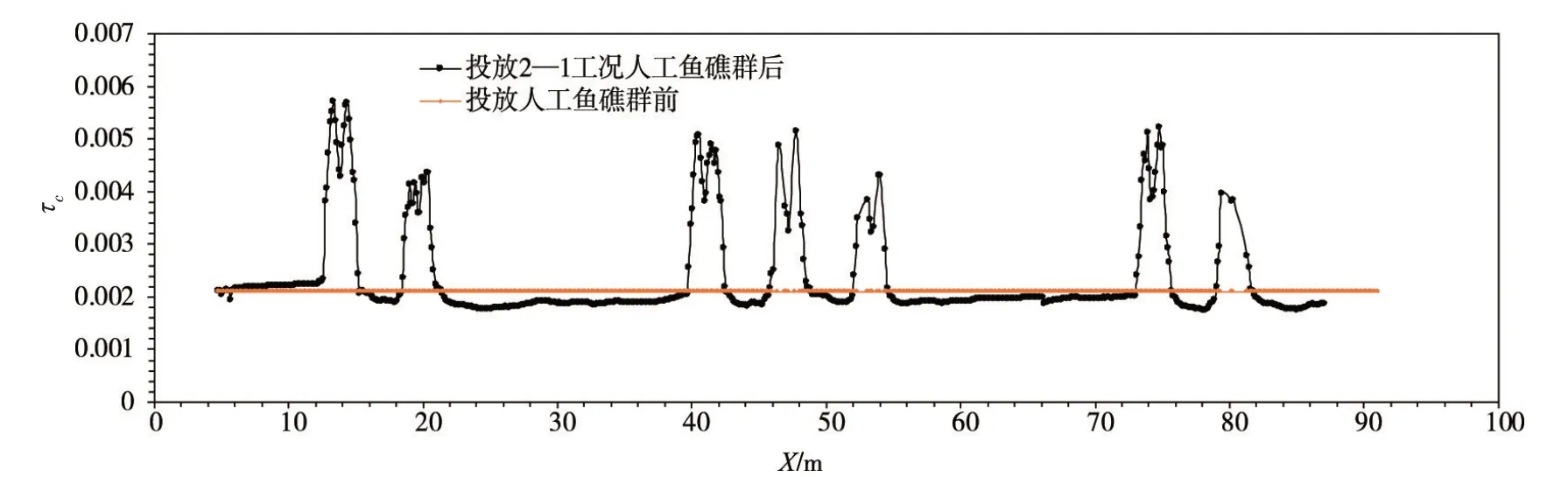
图11 鱼礁投放前后临界起动切应力变化趋势图
结合第3节区域水流流动分布特性可推断,临界起动切应力较投放前减小的部分,多为背涡流出现区域,通常背涡流面积越大,背涡流效应越强烈,该区域泥沙所需要的临界起动切应力越小,泥沙更容易起动;各个分礁群间临界起动切应力均小于投放前,但沿水流方向,临界起动切力呈增加趋势,这可能是由于沿水流方向,背涡流效应减小,水流趋于平缓而造成的。
以上对海床泥沙起动剪切力分析应用意义在于,除了可优化人工鱼礁优化布局和投放操作流程以外,还可指导在人工鱼礁区域投放饵料时机和密度等,如将饵料的起动扩散可视作不同粒径的泥沙颗粒的起动,本文海床泥沙起动特点这一研究成果可对后续在人工鱼礁群区域采用数值模拟饵料源项浓度扩散分布等奠定了基础,同时对海洋牧场养殖的目标物种索饵投放量设计及操作提供技术指导。特别是是对M型人工鱼礁群的水流分布及底层泥沙临界起动切应力而言,可根据海洋鱼类目标物种的索饵习性,如对于在海洋中分布于海床,泥沙耐受程度高的目标物种,适当的增加调整人工鱼礁布设,以调整人工鱼礁产生的上升流、背涡流面积和高度,有利于目标物种的觅食隐藏及生存繁殖。
5 结论
(1)对于上升流区流动分布,实验结果表明随着流速的增加,相同人工鱼礁群间距条件下上升流区流动范围的长度和面积等几何特征值均呈现增加趋势;在同一流速下,对比分析不同间距条件下人工鱼礁群上升流区几何特征值,得出当人工鱼礁群间距约为7.9倍礁长,即扩大25%人工鱼礁群原型间距时,几何特征值达到最大。
(2)对于背涡流区流动分布,实验结果表明相同人工鱼礁群间距条件下,随着流速增加,分礁群A后背涡流最大长宽变化不大,最大面积呈现增加趋势,但依然差距很小;在同一流速下,背涡流几何特征值随间距增加而有增大趋势,同样在扩大25%人工鱼礁群原型间距时达到最大。
(3)通过对比分析投放人工鱼礁群前、后的海床泥沙的临界起动切应力变化特点,表明在投放鱼礁后,整个人工鱼礁群前部及各个单体礁内部较投放前临界起动切应力明显增高,泥沙更不易起动;相邻两个单体礁内部及分礁群背部的各点的临界起动切应力较投放鱼礁前减小,表明该区域泥沙更容易起动。
(4)根据上升流、背涡流流场分布特征,并结合区域海床泥沙起动特点分析,初步得出当人工鱼礁群间距约为7.9倍礁长,即沿礁群扩大25%鱼礁群间距条件下鱼类适宜空间特征值均大于基准间距的情况,这对优化现有人工鱼礁布局具有实际指导意义。
本文通过人工鱼礁水槽模拟实验对流场分布与海床泥沙起动特征进行了分析,鉴于问题本身复杂性,加之实验中未直接投放泥沙进行观测以及未考虑波浪对人工鱼礁区域水流及泥沙的影响,本项研究成果尚有一定局限性。因此,在未来的研究中,可以深入开展投放泥沙后的波浪条件下人工鱼礁区域流场变化及泥沙起动的相应研究,完善实验成果,为人工鱼礁的实际投放与设计提供更加完善可靠的理论依据。