核环境作业机器人研究现状及关键技术分析
2020-12-11王从政赵建平廖礼斌
冯 常,王从政,赵建平,程 勇,蔡 根,窦 普,廖礼斌
核环境作业机器人研究现状及关键技术分析
冯 常1,2*,王从政1,2,赵建平1,2,程 勇1,蔡 根1,窦 普1,廖礼斌1
1中国科学院光电技术研究所,四川 成都 610209;2中国科学院大学,北京 100049
本文对国内外核环境作业机器人的发展历史和研究现状进行归纳、分析,总结和梳理了核环境作业机器人的共性结构和主要功能分类。基于核环境作业机器人的应用需求,重点介绍了当前核环境作业机器人急需突破的关键技术有:抗辐射加固、通信方法、光电探测、智能控制技术等。随着我国核工业规模逐渐扩大以及安全保障需求的提升,对核环境作业机器人的应用场景进行凝练,并进一步预测核环境作业机器人的未来发展趋势。
核环境;机器人;辐射加固;光电探测
1 引 言
核环境作业机器人是致力于解决核工业放射性燃料、废物等管理和处置问题的一类特种机器人[1-3]。由于国外核工业发展历史较长,美国等西方发达国家早在20世纪40年代就已经展开了核环境作业机器人技术的研究,并且成功研制了多类样机[4-7]。其中,公开报道的相关指标明确的核环境作业机器人均与历史上几次核事故紧密相关,据此,核环境作业机器人大致可以分为三代,如表1所示[8-22]。
相较于国外,国内核环境作业机器人起步相对较晚,我国核环境作业机器人研究起步于20世纪80年代末[23],在“863计划”智能机器人项目的支持下,开展了相关技术研究。1994年中国科学院沈阳自动化研究所和上海交通大学牵头国内多家单位研制了勇士号遥控移动作业机器人[24],该机器人支持有线和无线两种控制方式,可以爬40°的楼梯以及翻越25 cm高度障碍,但由于当时国内抗辐射技术能力比较落后,只是根据辐射要求对勇士号机器人的电子元器件进行一定的筛选。2009年6月,河南省杞县某辐照厂发生严重的卡源事故,西南科技大学研究的耐辐照机器人进入事故现场成功解决卡源问题[25],并将之前的辐照失效机器人拖离现场。此外,东南大学、北京航空航天大学和中国广核集团也开展了相关研究,东南大学研究的核用机器人主要针对于探测和处置[26],北京航空航天大学研制的机器人主要针对于高放射性区域内的辐射探测和放射性污染物取样[27],中国广核集团的机器人主要针对于核电站的日常巡检和维护[28-30]。中国科学院光电技术研究所也先后研制了核用水下观测机器人、核用水下多功能作业机器人、核用陆地巡检机器人以及核应急救灾机器人等多款核用机器人[31-33],如图1所示。

图1 核用机器人。(a) 水下多功能作业机器人[31];(b) 核应急救灾机器人[32]
对比于国外核工业的规模,我国的规模较小,对核环境作业机器人的需求相对不高,相关的产品主要依赖于进口。目前,国内只有较少的研发单位能够研制核用机器人,但可靠性不高,研制的核环境作业机器人也没有大规模应用。近年来,随着我国耐辐照技术、通信技术等快速发展,与国外先进技术的差距也日趋缩小,加之我国核工业规模逐渐扩大,国内核环境作业机器人将有较好的发展趋势。下面就核环境作业机器人的系统结构、关键技术、应用需求和发展趋势等进行重点介绍。
2 核环境作业机器人的系统结构
通过对国内外核环境作业机器人现状调研、分析和总结,核环境作业机器人的应用主要解决两方面的需求,一是对核反应设施进行日常巡逻检查,辅助工作人员完成在役设备监测;二是在突发核事故下的应急处置工作。进一步分析作业机器人的功能,可以分为探测、清障、维修和去污四类。
核辐射探测机器人主要用于对核设施特定区域的环境辐射当量实时监测,并能够实现环境辐射当量的三维成像。如中国原子能科学研究院与北京航空航天大学联合研发了核辐射检测与应急机器人[17],该机器人携带的放射源“热点”成像装置可以成功构建机器人所处环境周围放射性污染程度的图像,且成像装置可以在水平方向自由旋转。清障类机器人主要是用于核事故发生早期,对核设施厂房内外进行障碍物清理以及破拆工作,这一类机器人一般有较强的驱动能力,使得可以清除较大障碍物;此外,该类机器人应该有较为强大的目标识别和地图构建能力[34],为后续其它机器人和应急人员进入现场创造条件。维修类机器人则主要用于严重事故现场应急维修和操作[35],由于不同核事故情况下,不同设备的损毁情况不同,需要维修的部件差异较大,这一类机器人种类比较多,主要是针对某一特定任务而研发的;同时,该类机器人普遍环境适应能力强,具有较强复杂地形通过能力、路径规划能力,以适应核设施内部各种突发情况;在末端执行机构方面,也具有较高的精度,以实现对精密部件的维修。去污类机器人[36]主要是用于对工作区域和人员通道中存在放射性污染物进行清理,这类机器人一般拥有较高的耐辐射能力。
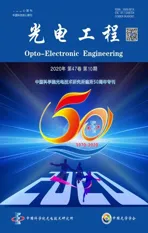
归纳上述典型核环境作业机器人,在系统组成方面,主要包括驱动结构、运动控制模块、传感器单元、通信模块、执行机构等,图2为典型核用水下机器人的总体结构图[32]。
对于多任务需求的核用机器人,采用传统的集中控制方法很难实现机器人各功能模块协作、重构等多种形式的运动,该类机器人一般采用分层混合式控制结构[31],如图3所示。
2.1 驱动结构
驱动结构是核环境作业机器人重要组成部分,是其他模块的载体,同时,也决定了机器人对于不同环境的适应性以及作业性能。核环境作业机器人的工作环境和具体功能不同,其驱动结构也不同。目前,根据核环境作业机器人工作的环境可以将其分为陆上机器人、水下机器人和空中机器人。
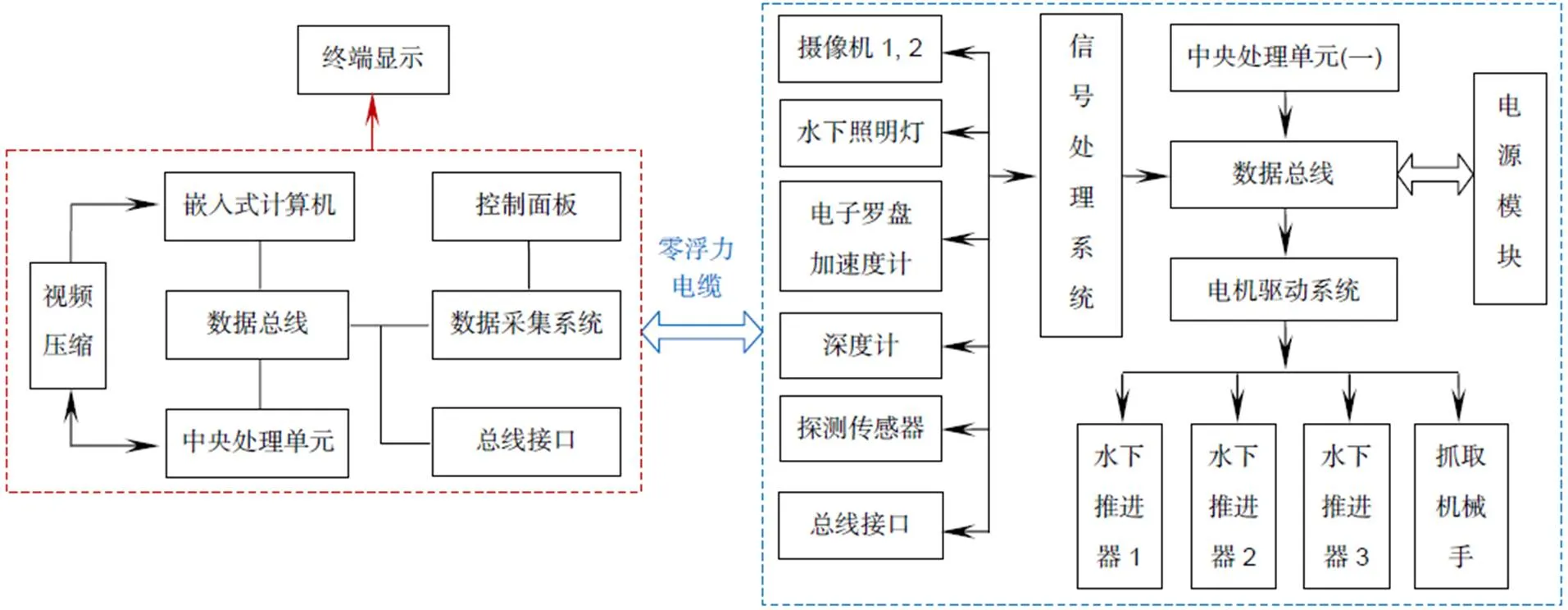
图2 核用水下机器人框图[32]

图3 核环境作业机器人分层式控制结构[31]
其中,陆上机器人的驱动结构包含轮式、履带式、多足式等。中国辐射防护研究院研制过一种六轮式辐射探测机器人[37],最大速度可达3 km/h,载重高达60 kg,爬坡能力达25°,具有速度快、移动灵活等优点,但载重方面逊于履带式结构。东南大学与南京军区某部研制的小型核电站探测机器人采用履带结构[26],最大爬坡60°,可以爬40°的楼梯,越过30 cm高的障碍物,最大载重80 kg。虽然,越野和载重性能强于轮式,但灵活性和速度却不及轮式。日本东芝公司也发布过一款四足机器人[29],速度为1 km/h,它的四足设计保证其可以通过复杂崎岖的地形,但同时也牺牲了速度和载重能力。
空中机器人一般用于环境辐射监测,2014年俄罗斯气象环境检测局研制了一款用于辐射监测的无人机系统[38],采用“超级卡姆”无人机平台,具有升空最高3600 m,速度为65 km/h~120 km/h,最大抗风15 m/s的性能。无人机广阔的视野可以增大监测范围。
中广核集团阳江核电有限公司针对核电站取水口海生物监测采用了一款LBF-150型水下机器人[39],该机器人由四个大功率无刷推进器驱动螺旋桨,速度为3节,可下潜深度150 m。
2.2 控制系统
应用于核环境的机器人运动控制系统一般采用上、下位机分布式控制系统实现。下位机一般集成在机器人本体中,通过一些工控芯片、单片机等实现,具有稳定性好等优点,通过无线或有线模块与上位机进行通信,并接收来自上位机的控制命令,驱动执行部件运行。上位机一般为计算机系统,通过人机交互界面显示机器人采集到的视频和辐射相关信息。在核辐射环境下对控制系统的稳定性有较高的要求,其中,还涉及到定位导航技术的精确性以及良好的自动避障技术。目前,导航技术运用比较多的有:姿态传感器、GPS、RFID、SLAM环境三维立体化建模技术等,如熊鹏文等[40]设计的一种核电站巡检与应急机器人的控制系统,采用通信传输级、控制级和装置级,并基于相连总线实现机器人的模块化。Jilek团队[41]研发的辐射探测机器人具有自主规划路径的能力,导航框图如图4所示,通过RTK GNSS传感器实现精确定位,并能够对室外矩形区域进行三维扫描,构建辐射巡检图像。
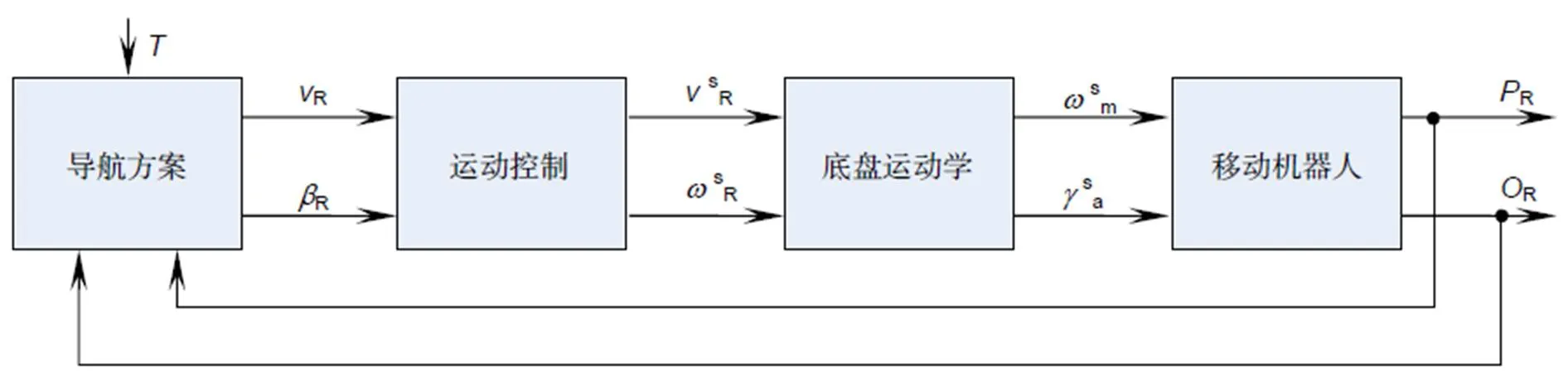
图4 机器人自主导航框图[41]
2.3 传感器单元
传感器单元是核环境作业机器人的重要组成部分,是完成探测任务以及自动化控制的重要基础。一般来说,核环境作业机器人都会携带许多类型的传感器、仪器和探头等来完成监测任务,其中,耐辐照摄像模块实现环境的可见光数据采集,辐射探测仪用来检测环境辐射当量,还有其他诸如温湿度计、红外测距仪、红外探测仪、气溶胶取样仪等辅助传感器设备。这些传感器探测信息后,通过通信模块传送至后方的处理模块,再通过数据处理技术以及融合算法对核环境作业机器人所处的环境进行分析,对异常的状态,如外观、尺寸、温度和浓度等实现处置。其中,作为机器人“眼睛”的耐辐照摄像模块尤为重要,中国科学院光电技术研究所[42-43]分别基于光导管、CCD、CMOS图像传感器通过设计、筛选和加固,实现系列化的耐辐照视觉传感单元,用于核环境现场的监视、测量和机器人导航等(如图5所示),是一款广泛应用于核环境下的耐辐照水下高清摄像系统。

图5 耐辐照水下高清摄像系统[42]
2.4 通信模块
核环境作业机器人的通信模块主要由无线和有线通信两种方式实现。由于核工业现场的内部结构十分复杂,尤其是发生核事故之后原有结构会被破坏,导致出现许多未知的风险,这就要求核辐射环境下通信模块的高稳定性。然而,目前上述两种通信方式都存在一定程度的缺陷,核设施防辐射砌体墙大部分由较厚的混凝土和金属承载板组成,再加上强辐射对无线信号的干扰,导致无线通信的距离会受到很大的限制,且信号稳定性很差,针对这一问题的解决方法主要有:增加信号中继辅助,拓展通信距离;开发高频段通信,使得信号所受干扰减小。有线通信在核辐射的复杂环境下很容易发生通信线缆的缠绕问题,使得机器人行动受限,当前解决方法主要采用线缆防缠绕设计。因此,核环境作业机器人多采用有线加无线的方式,结合两者的优点,再根据现场实际情况在两者之间切换,一般来说,当无线通信失效时,再采用有线通信的方式。如美国的Packbot机器人[1]就是采用的无线加有线的混合通信方式,如图6所示,且有线通信采用了防线缆缠绕的设计。

图6 Packbot机器人[1]
2.5 执行机构
执行机构一般指的是核环境作业机器人用来执行核环境现场的关键阀门开关[30]、障碍物清理等动作的部件。目前,核环境作业机器人的末端执行机构的种类已经变得多种多样,有用来抓取物品、打开开关和清理障碍物的机械手臂,也有用来在反应堆水池和乏燃料水池进行异物打捞的微型真空泵,以及用于水下焊接的焊接机等。这些不同的执行机构虽然形式各不相同,但都拥有精度高、可靠性好以及耐辐射能力强的优点。
3 核环境作业机器人关键技术
随着我国核工业规模越来越大,特别是核电站数量的增加,设备的常规维修以及应急处理的需求越来越多。同时,伴随着我国对核环境作业机器人的研究不断深入,取得进展和关键技术突破的同时,也发现了一些明显的不足,急需后续的跟进研究。
3.1 抗辐射技术
抗辐射能力对核环境作业机器人至关重要,在日本福岛核电站事故中,前期进入的大多数应急机器人都是由于强辐射环境导致瘫痪在反应堆厂房而无法返回。核反应堆在运行过程中会释放诸如α、β、γ射线和中子,这些很容易导致机器人的电子元器件以及传感器失灵[44],同样,也会加速内部的绝缘材料和连接处的老化,特别是机器人上面的摄像模块,内部的光电传感器极易收到强辐射的干扰,导致损坏[45]。此外,对于采用无线遥控方式的核环境作业机器人,其都需要携带可充电的电池,由于锂电池相比镍镉电池、镍氢电池在能量密度和使用寿命上有明显优势,故使用较为广泛,但锂电池在强辐射环境下会存在容量降低等问题,安全性也较差,故在选择电池时应考虑这个因素,或者对电池进行一些抗辐射设计以保障其性能。
核环境作业机器人关键部件的抗辐射设计一直都是机器人设计中需要攻克的关键技术[46]。目前,各国研究人员都在对抗辐射材料的研究上进行了大量工作,以保障核环境作业机器人能在强辐射环境下平稳运行[47]。中国科学院光电技术研究所在核环境作业机器人电子系统抗辐射加固技术方面取得了实质进展,根据器件核辐射损伤物理机理,采用特种材料作为感知器件,研究视频感知器件及系统集成的抗辐射防护方法;采用主动屏蔽与被动隔离相结合的安全防护策略,研究光学敏感器件与控制电子器件分离防护方法;建立机器人感知系统耐辐照性能评价和实验方法,实现高耐辐照的传感器,进而保障核环境作业机器人在高辐照环境下的信息采集及系统防护,形成了系列耐辐照核环境作业机器人,并成功应用至核电站陆地巡检、核电站水下作业、核电站水下检查等涉核场景,如图7所示。
3.2 可靠通信技术
由于核设施内部结构非常复杂,且发生核事故后结构会发生一定的损坏,机器人与后端远程控制终端通信的可靠性就变得十分重要,在现场探测到的有用信息和突发情况如何稳定地传送到后方是急需解决的关键问题。目前,核环境作业机器人采用的通信方式一般为有线和无线两种方式[22]。对于无线通信,由于核设施内的混凝土墙和强辐射环境对信号的干扰,制约了其通信距离和稳定性;对于有线通信,复杂的核环境很容易导致线缆缠绕的发生。目前,解决方法是采用线缆防缠绕设计和增加中继通信等措施进行解决,两者相结合的通信方式能够增强通信的稳定性,同时,根据实际情况在两者之间进行切换。中国科学院光电技术研究所的陆地巡检机器人采用该通信方式设计实现,如图8所示。
3.3 辐射探测技术
核环境作业机器人对未知的核事故环境下的辐射探测能力是其关键的性能指标,通过与摄像模块的视频探测相结合,从而可以构建出机器人周围的三维辐射强度图像,为后方工作人员提供核事故现场辐射分布情况,为后续的决策提供参考依据。常用的辐射探测技术主要有GM管剂量率和γ相机辐射三维探测两种[27]。γ相机由于内部光电传感器和成像元件较多,需要很多的辐射屏蔽材料进行保护,导致其体积相对较大。而GM管则只能探测γ射线的剂量率,无法得到整个环境的辐射分布情况,但若是配合视频模块再加上机器学习算法支持,可有望实现γ放射性分布情况的快速探测。图9为核工业航测遥感中心联合中国科学院光电技术研究所、中核四〇四有限公司共同研制的退役现状及厂房高辐射区域源项巡检机器人,耐辐照机器人搭载γ相机和CZT谱仪,以获取相关区域γ剂量率、γ热点分布、γ谱、三维点云、图片、视频等数据信息。

图7 系列化核环境作业机器人。(a) 陆地巡检机器人;(b) 水下作业机器人;(c) 水下检查机器人
图8 核电站陆地巡检机器人

图9 核用巡检机器人。(a) 机器人本体;(b) 操作界面图
3.4 智能控制技术
随着智能技术和机器人技术的不断发展,核环境作业机器人也逐渐由以前单一遥控机器人逐渐向具有自主决策的智能机器人的方向发展。目前,核环境作业机器人上配备的摄像模块、雷达、红外、陀螺仪以及超声波等各种传感器增强了机器人对周围环境的感知能力[2],通过对这些信息的融合处理再搭配上机器学习算法,对周围环境情况进行判断然后实现自主控制。同时,机器人平台上搭载的机械手臂和辐射探测器等,使得操作者也能根据传感器信息和任务需求对机器人进行控制,“人-机-环”的高效融合技术以及多机器人之间协同配合的智能控制技术也是未来核环境作业机器人的关键技术。
4 核环境作业机器人应用需求
目前,对核环境作业机器人的应用需求主要分为两大类,包括日常巡查和检修、突发事故下的应急处理,以代替工作人员在空间狭小、温度较高、风险较大的区域对重要设备进行维修、监测和处置作业。
4.1 核设施日常巡检
1)反应堆水池检修
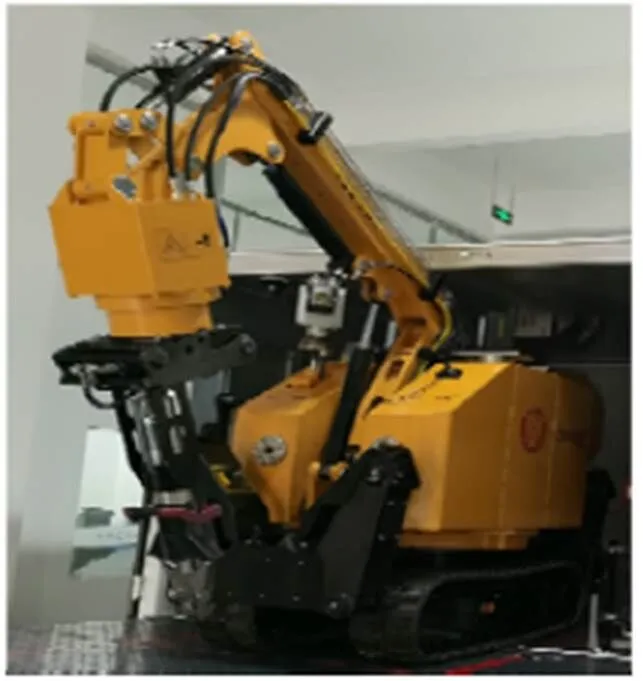
反应堆燃料贮存池是由不锈钢焊接构成,其表面必须光滑、完整,方便去污和质量管控。但随着核反应的进行,不锈钢腐蚀现象也随之而来,必须定期对水池的不锈钢覆面进行检查,如果腐蚀现象十分严重,就需对其表面进行修复。除了腐蚀现象,高空坠落的物体同样可能造成不锈钢面的破损。当前,对于这种现象一般是由训练有素的工作人员穿上潜水服进行水下作业,但由于环境辐射强度大,工作区域狭窄,导致工作时间不能太长,往往需要多人轮流进行操作,而且工作人员还要时刻小心周围尖锐物体割破防护服,进而造成人体吸入性损伤。针对该类需求,机器人可有效应对,图10为燃料组件检测机器人正在乏燃料水池的池边作业[48]。

图10 燃料组件检测机器人[48]
2) 水下异物清理
核反应堆内部的放射性水池表面积非常大,且防范异物进入的措施有限。反应堆经常要进行各种大修工作,该工作中,参与的工作人员较多,设计的作业之间也相互交叉,这进一步加剧异物跌落进反应堆水池底部的风险。针对这种情况,一般的打捞工具往往无法取得较好的成果,这将为反应堆运行埋下严重的隐患,造成不可预知的风险和巨大经济损失。因此,研发一种用于水下自动巡逻和异物精确打捞的智能核环境作业机器人就迫在眉睫。
4.2 反应堆突发事故下的应急处理
1) 堆芯重要设备应急修复
核反应堆运行过程中,堆芯设备同样可能出现各种各样的突发问题和缺陷,如果这些问题不能得到及时的发现和处理,将对核反应堆的安全造成严重的危害。而且堆芯设备出现问题一般都是突发情况,需要应急处理。此外,作为核反应的核心,堆芯设备的危险性也较大,处理方案需要充分的安全论证和反复试验才能够投入实施。我国在这方面的技术研究相对于西方发达国家来说比较落后,需要提前对这些事故进行充分的应急准备,同时还要借鉴国外经验,提前对这一类机器人进行相关研发。
2) 路障清除和泄露放射性物质处理
严重的核事故下都会伴随着一些爆炸产生,这些爆炸不仅会严重损坏核反应堆内部结构,同时也会制造一些障碍物,这将阻塞一些关键通道,严重影响后续的抢险措施。同时,强烈的爆炸会使得一些具有强放射性物质分散在反应堆厂房内外各处,同样也需进行处理,否则会造成严重的核泄漏事故。
5 核环境作业机器人未来发展趋势
现阶段的核环境作业机器人主要用于替代工作人员在一些辐射强度大的区域进行维修和抢险工作。随着美国三哩岛、苏联切尔诺贝利以及日本福岛核事故的发生,世界各国都对核环境作业机器人的研发投入了巨大精力,并不断进行优化升级,随着传感器技术、计算机技术以及制造技术的快速升级,世界上的核环境作业机器人越来越朝着高稳定性、智能化以及通用化发展。
1) 高稳定性
核反应堆的应用环境比较特殊,所以对机器人工作的稳定性提出了较高的要求。由于一旦核环境作业机器人在反应堆执行任务时出现严重的故障甚至是死机,都会成为新的辐射源以及障碍物,严重影响后续救灾工作的进行。这就对机器人的驱动结构、通信系统以及控制系统有着较高的可靠性要求,其关键在于整机的抗辐射能力。此外,投入运行前要经过反复的测试,对可能出现的故障都要有相应的处理技术。
2) 智能化
由于核反应堆内部空间比较有限,用于核环境作业机器人工作的区域更是比较狭小,加之处于强辐射环境下的设备大多是关键设施,因此,机器人工作过程是不允许对这些关键设备造成损坏的,否则将会引发严重的核事故。目前,核环境作业机器人主要采用的是后方操作人员通过有线或者无线的方式进行控制,由于通信的稳定性会受到各种突发状况的影响,使得机器人与后方终端连接出现断开的情况,该情况需要核环境作业机器人能够根据当前的环境进行自主决策,如智能避让、自动规划路径等,这些也是未来的核环境作业机器人研究的重要方向之一。同时,智能化技术也对机器人的各种传感器提出更严格的要求,使得机器人能够通过周围环境信息实现部件等的高精度检查,并能够对自身出现的故障进行自我修复,以保障任务的顺利开展。
3) 通用化
目前,世界上发生的核事故次数比较少,历史上较大的核事故中间间隔时间比较久,进而核环境作业机器人的研发工作始终围绕着核事故需求进行,这就使得大部分核环境作业机器人的零部件均为专用定制的,难以批量化生产以及通用标准制造,进而使得不同核环境作业机器人的零部件难以互换和匹配。如日本福岛核事故救援过程中,日本JCO研发的核环境作业机器人由于年久失修,无法通过更换关键零部件快速投入核事故的应急工作。因此,各国核环境作业机器人的关键零部件通用化、模块化也成为一个发展趋势,降低核环境作业机器人研发的难度和周期,使得未来有更广阔的发展空间。
6 总结与展望
本文对国内外核环境作业机器人的发展历史和研究现状进行综述,总结了核环境作业机器人的关键部件的功能以及研究进展,并对其关键技术和应用需求进行了简要分析,最后,归纳出核环境作业机器人的未来发展趋势。综上,我国核环境作业机器人技术由于历史和产业规模原因,在发展上落后于西方发达国家,核心技术仍然没有较好地掌握,但当前我国核工业规模正在逐渐变大,随着安全保障需求日益迫切,尤其是日本福岛核事故后,我国核反应堆工作的相关研究人员也在紧锣密鼓地加快研究,突破更多技术瓶颈,未来的核环境作业机器人产业将迎来一个快速上升时期。
[1] Du S B, Jiang W W, Ding P. Status and key technologies analysis for robot in nuclear applications[J]., 2016, 37(5): 93–97, 103.
杜树标, 蒋韦韦, 丁泮. 核环境机器人现状及关键技术分析[J]. 兵器装备工程学报, 2016, 37(5): 93–97, 103.
[2] Liu B, Wang X, Wu W S,. The application prospect of robot in the nuclear and radiation emergency[J]., 2015, 41(1): 62–64.
刘波, 王欣, 吴王锁, 等. 机器人在核与辐射事故应急中的应用展望[J]. 工业安全与环保, 2015, 41(1): 62–64.
[3] Nagatani K, Kiribayashi S, Okada Y,. Emergency response to the nuclear accident at the Fukushima Daiichi Nuclear Power Plants using mobile rescue robots[J]., 2013, 30(1): 44–63.
[4] Kim I S, Choi Y, Jeong K M. A new approach to quantify safety benefits of disaster robots[J]., 2017, 49(7): 1414–1422.
[5] Edmondson R, Vaden J, Hyatt B,. 3D vision upgrade kit for TALON robot[J]., 2010, 7692: 76920J.
[6] Otaki M. Environmental monitoring robots for nuclear emergencies[J]., 2002, 16(6): 501–504.
[7] Byrd J S, Devries K R. A six-legged telerobot for nuclear applications development[J]., 1990, 9(2): 43–52.
[8] Meleran H, Harry H TUtility/manufacturers robot user group: a status overview during its first seven years[C]//, 1993: 263–266.
[9] Bartholet T G. OEDX I: A new class of mobile robotics[J]., 1984, 18(10): 261–268.
[10] Roman H T. Robotic applications in PSE&G’s nuclear and fossil power plants[J]., 1993, 8(3): 584–592.
[11] Houssay L P. Robotics and radiation hardening in the nuclear industry[D]. Gainesville, FL: University of Florida, 2000.
[12] Kobayashi T, Miyajima K, Yanagihara S. Development of remote surveillance squads for information collection on nuclear accidents[J]., 2002, 16(6): 497–500.
[13] Oka K, Shibanuma K. Development of a radiation-proof robot[J]., 2002, 16(6): 493–496.
[14] Abouaf J. Trial by fire: teleoperated robot targets Chernobyl[J].s, 1998, 18(4): 10–14.
[15] Kawatsuma S, Fukushima M, Okada T. Emergency response by robots to Fukushima‐Daiichi accident: summary and lessons learned[J]., 2012, 39(5): 428–435.
[16] Mano T, Hamada S. Development of a robot system for nuclear emergency preparedness[J]., 2002, 16(6): 477–479.
[17] Hosoda Y, Yamamoto H, Hattori M,. 'SWAN': a robot for nuclear disaster prevention support[J]., 2002, 16(6): 485–488.
[18] Isozaki Y, Nakai K. Development of a work robot with a manipulator and a transport robot for nuclear facility emergency preparedness[J]., 2002, 16(6): 489–492.
[19] Yuguchi Y, Satoh Y. Development of a robotic system for nuclear facility emergency preparedness—observing and work-assisting robot system[J]., 2002, 16(6): 481–484.
[20] Nagatani K, Kiribayashi S, Okada Y,. Emergency response to the nuclear accident at the FuKushima Daiichi nuclear power plants using mobile rescue robots[J]., 2013, 30(1): 44–63.
[21] Qian H H, Xu Y S, Xu W F. The State-of-arts and key technologies for telerobotics in nuclear applications[C]//, 2013: 6016–6017.
[22] Chen F G, Yang M M, Han Y,. Lessons learned from robots used in Fukushima nuclear accident[J]., 2018, 38(4): 344–351.
陈法国, 杨明明, 韩毅, 等. 机器人在福岛核事故中的应用和启示[J]. 辐射防护, 2018, 38(4): 344–351.
[23] 左民, 杨汝清. 我国核工业中的遥控技术与机器人技术的应用与开发[J]. 机器人, 1990, 12(2): 62–63.
[24] Yang R Q, Song K W. A “warrior” teleoperated mobile robot[J]., 1997, 7(2): 11–14.
杨汝清, 宋克威. “勇士号”遥控移动式作业机器人[J]. 高技术通讯, 1997, 7(2): 11–14.
[25] Hua Y T, Ge L Q, Yang Q,. About the first domestic method combining with nuclear and automation technology to dispose stucking radioactive sources[J]., 2012, 32(8): 953–955.
花永涛, 葛良全, 杨强, 等. 关于国内首次采用遥控机械设备处置辐照卡源故障[J]. 核电子学与探测技术, 2012, 32(8): 953–955.
[26] 崔建伟. 东南大学研制成功小型核化探测与应急处理遥操作机器人[J]. 机器人技术与应用, 2012(1): 44–45.
[27] Li H B, Zhang T Y, Chou W S. Design of miniature manipulator systems for nuclear detecting and emergency processing robots[J]., 2011, 21(1): 101–105.
李怀兵, 张韬懿, 丑武胜. 核辐射探测与应急处理机器人的小型机械臂系统设计[J]. 高技术通讯, 2011, 21(1): 101–105.
[28] Zhang X J, Zhang J H, Yuan J,. Development of an underwater robot for nuclear reactor vessel[C]//2013: 1699–1703.
[29] Liu Q S, Zhang Y X, Xiang W Y,. Current application and development direction of robot technology for nuclear power station[J]., 2011(5): 12–16.
刘青松, 张一心, 向文元, 等. 核电站机器人技术应用现状及发展均势[J]. 机器人技术与应用, 2011(5): 12–16.
[30] Wang X Z, Chen G D, Du J,. Door-opening motion planning of a robot with tracked mobile base for nuclear power plants[J]., 2019(8): 243–245, 250.
王雪竹, 陈国栋, 杜佳, 等. 核电站履带式开门机器人运动规划[J]. 机械设计与制造, 2019(8): 243–245, 250.
[31] Dou P, Liao L B, Zhang Z G. Design of a μC/OS-II based control system for a underwater foreign-salvage robot[J]., 2014, 22(7): 2100–2102.
窦普, 廖礼斌, 张志刚. 基于μC/OS-II水下异物打捞机器人控制系统的设计[J]. 计算机测量与控制, 2014, 22(7): 2100–2102.
[32] Feng C, Dou P, Chen S C. Study of mini underwater observation robot design and control[J]., 2009, 17(4): 672–674, 678.
冯常, 窦普, 陈树才. 小型水下观测机器人设计与控制的研究[J]. 计算机测量与控制, 2009, 17(4): 672–674, 678.
[33] Wei X X, Feng C, Pu X Q. Design and analysis of manipulator based on the double function underwater robot[J]., 2015, 42(6): 50–55.
魏晓霞, 冯常, 蒲小琼. 水下双功能机器人的机械手设计与分析[J]. 机械, 2015, 42(6): 50–55.
[34] Zakaria A H, Mustafah Y M, Abdullah J,. Development of autonomous radiation mapping robot[J]., 2017, 105: 81–86.
[35] Gu B W, Choi S Y, Choi Y S,. Novel roaming and stationary tethered aerial robots for continuous mobile missions in nuclear power plants[J]., 2016, 48(4): 982–996.
[36] Zhang M L, Peng P, Zhang X J. A study of the recent development and key technologies of advanced robots served in special circumstances[J]., 2013, 42(1): 70–75.
张明路, 彭平, 张小俊. 特殊环境下服役机器人发展现状及其关键技术研究[J]. 河北工业大学学报, 2013, 42(1): 70–75.
[37] Shen H Y, Zhu W N, Dong Q M,. Development of the tele-control robot for nuclear detection in intense radiation environment[J]., 2015, 35(1): 74–78.
沈华亚, 朱万宁, 董强敏, 等. 耐强辐射遥控探测机器人研制[J]. 核电子学与探测技术, 2015, 35(1): 74–78.
[38] Luo Z X, Li X, Zuo L,. Experimental study on nuclear radiation monitoring and aerosol sampling system by unmanned aerial vehicle[J]., 2019, 31(1): 58–60.
罗中兴, 李霄, 左莉, 等. 无人机载核辐射监测及气溶胶采样系统试验分析[J]. 环境监测管理与技术, 2019, 31(1): 58–60.
[39] 成丰, 柳宗晓. 水下机器人在核电厂取水口海生物监测中的初步应用[J]. 机器人技术与应用, 2016(4): 27–30.
[40] Xiong P W. Research on critical technology of nuclear plant inspection and emergence robot[D]. Nanjing: Southeast University, 2015.
熊鹏文. 核电站巡检与应急处理机器人的关键技术研究[D]. 南京: 东南大学, 2015.
[41] Jilek T, Zalud L, Kocmanova P. Robotic autonomous outdoor gamma radiation monitoring and mapping[J]., 2016, 10(2): 162–168.
[42] Wang C Z, Hu S, Gao C M,. Nuclear radiation degradation study on HD camera based on CMOS image sensor at different dose rates[J]., 2018, 18(2): 514.
[43] Wang C Z, Hu S, Gao C M,. Study on optical imaging distortion of underwater thermal disturbance[J]., 2019, 46(10): 180438.
王从政, 胡松, 高椿明, 等. 水下热扰动的光学成像失真问题研究[J]. 光电工程, 2019, 46(10): 180438.
[44] Han Y L, Luan W L, Zhang Y,. Thermal control technologies of electronic devices and their applications on nuclear robots[J]., 2015, 35(1): 112–122.
韩延龙, 栾伟玲, 张衍, 等. 电子器件热防护技术及在核机器人中的应用[J]. 核科学与工程, 2015, 35(1): 112–122.
[45] Xu S L, Zou S L, Huang Y J,. Availability evaluation and improvement plan of image sensors in accident of nuclear power plant[J]., 2016, 36(6): 651–655.
徐守龙, 邹树梁, 黄有骏, 等. 核电厂事故工况下监控图像传感器可用性分析与加固[J]. 核电子学与探测技术, 2016, 36(6): 651–655.
[46] Wang X T. Control system design of a nuclear detection robot based on radiation-hardened optimization[J]., 2012, 32(5): 547–551, 626.
王希涛. 一种辐射加固优化的核探测机器人控制系统设计[J]. 核电子学与探测技术, 2012, 32(5): 547–551, 626.
[47] Chen F G, Zhu W N, Dong Q M,. The radiation tolerance design and test of a tele-controlled robot[J]., 2016, 36(2): 121–124.
陈法国, 朱万宁, 董强敏, 等. 遥控机器人的耐辐射设计和测试[J]. 核电子学与探测技术, 2016, 36(2): 121–124.
[48] 陈嘉杰, 孙飞翔, 董超群, 等. 核燃料组件变形检测机器人研究[J]. 机器人技术与应用, 2018(6): 40–42.
Research status and key technologies analysis of operating robots for nuclear environment
Feng Chang1,2*, Wang Congzheng1,2, Zhao Jianping1,2,Cheng Yong1, Cai Gen1, Dou Pu1, Liao Libin1
1Institute of Optics and Electronics, Chinese Academy of Sciences, Chengdu, Sichuan 610209, China;2University of Chinese Academy of Sciences, Beijing 100049, China
Nuclear emergency rescue robot
Overview:The operating robots for nuclear environment are used in nuclear industry to guarantee the safety of operators. With the increasing scale of China's nuclear industry and the increasing demand for safety assurance, the application scenarios of operating robots for nuclear environment are expanded. To introduce and analyze the development history and research status of operating robots for nuclear environment at home and abroad, the common system structure and classification based on main functions for operating robots for nuclear environment are summarized. The robot system is mainly composed of 5 parts: drive structure, control system, sensor unit, communication module, and actuator. The operating robots for nuclear environment are roughly divided into three generations, including footed robots and crawler robots. Due to the terrain constraints, there are more crawler robots used to video detection, irradiation detection, emergency treatment, and environmental sampling in the nuclear environment. Based on the application requirements of operating robots for nuclear environment, it is concluded that the key technologies in urgent need of breakthrough for nuclear robots are radiation reinforcement, communication method, photoelectric detection, intelligent control technology, etc. Among them, the anti-radiation technology is the most prominent feature which is different from other types of robots. The anti-radiation ability determines the working area and performance applicability of the nuclear environment robots. According to the physical mechanism of nuclear radiation damage of the device, special materials are used as the sensing device to study the anti-radiation protection method of video sensing device and system integration. The safety protection strategy combining active shielding and passive isolation is adopted to study the separation of optical sensitive devices and control electronics protection methods. IOE, CAS establishes the evaluation and experimental methods of the radiation resistance performance of the robot perception system to realize high radiation resistance sensors, which can ensure the information collection and system protection of the nuclear environment robots in the high-radiation environment. The application requirements of robots in the nuclear environment are mainly divided into two categories, including daily inspections and maintenance, and emergency handling in emergencies. It replaces the staff in repairing, monitoring, and disposing of important equipment in small-space, high-temperature, and high-risk areas. But at this stage, the nuclear environment operation robot is mainly used to replace the staff in some areas with high radiation intensity to carry out maintenance and rescue work. Countries around the world have invested a lot of energy in the research and development of robots for nuclear environment operations, and have continued to optimize and upgrade them. With sensor technology and computer technology as well as the rapid upgrade of manufacturing technology, the world's nuclear-environment robots are increasingly developing towards high stability, intelligence, and generalization.
Citation: Feng C, Wang C Z, Zhao J P,Research status and key technologies analysis of operating robots for nuclear environment[J]., 2020, 47(10): 200338
Research status and key technologies analysis of operating robots for nuclear environment
Feng Chang1,2*, Wang Congzheng1,2, Zhao Jianping1,2, Cheng Yong1,Cai Gen1, Dou Pu1, Liao Libin1
1Institute of Optics and Electronics, Chinese Academy of Sciences, Chengdu, Sichuan 610209, China;2University of Chinese Academy of Sciences, Beijing 100049, China
To introduce and analyze the development history and research status of operating robots for nuclear environment at home and abroad, the common system structure and classification based on main functions for operating robots for nuclear environment are summarized. Based on the application requirements of operating robots for nuclear environment, it is concluded that the key technologies in urgent need of breakthrough for nuclear robots are radiation reinforcement, communication method, photoelectric detection, intelligent control technology, etc. Finally, with the increasing scale of China's nuclear industry and the increasing demand for safety assurance, the application scenarios of operating robots for nuclear environment are condensed, and the future development trend of operating robots for nuclear environment is predicted.
nuclear environment; robot; radiation hardening; photoelectric detection
TL75;TP211+.6
A
冯常,王从政,赵建平,等. 核环境作业机器人研究现状及关键技术分析[J]. 光电工程,2020,47(10): 200338
10.12086/oee.2020.200338
: Feng C, Wang C Z, Zhao J P,Research status and key technologies analysis of operating robots for nuclear environment[J]., 2020, 47(10): 200338
2020-08-28;
2020-09-26
中国科学院西部之光基金资助项目(YA17K003)
冯常(1972-),男,硕士,正高级高级工程师,主要从事特种机器人及光电检测技术的研究。E-mail:fc407@ioe.ac.cn
Supported by West Light Foundation of the Chinese Academy of Sciences (YA17K003)
* E-mail: fc407@ioe.ac.cn