矿用电动轮自卸车电驱系统控制策略研究
2020-12-09唐勋路刘辉荣黄彩波文雯
唐勋路 刘辉荣 黄彩波 文雯

摘要:以某220T电动轮自卸车为研究对象,提出了柴油机转速、发电机电压、电机转矩控制策略,通过实验验证了所提出的控制策略,柴油机转速与电压跟随性良好,能够满足矿用电动轮自卸车的动力需求。
关键字:电动轮自卸车;柴油机转速控制;电压跟随控制;
中图分类号:U469.4 文献标志码:A
0 引言
电动轮自卸车是一种在露天矿山、水电工程上用来运输矿石、泥土石料的非公路用车辆。有机械传动、电传动两种结构,百吨级以上的大型电动轮自卸车普遍采用电传动的方式,从上世纪70年代发展至今,国内外主流厂家的电传动系统大多采用交-直-交系统,主要由柴发机组、牵引变流器、驱动电机、制动电阻等部件组成,本文以某220t电动轮自卸车为研究对象,从实际工程应用角度出发,综合考虑矿山现场各种工况的特点,以优化自卸车的动力性能为需求目标,提出了柴油发动机转速、交流发电机电压、牵引变流器的转矩控制决策,最后通过实验验证了本文提出的控制策略。
1 电动轮自卸车交流牵引传动系统
矿用电动轮自卸车电驱系统主要由柴油机-发电机组、变流器、电机、斩波电阻等部分构成,柴油机组发出的三相交流电经过变流器整流得到直流电,在通过逆变单元变换成频率、电压可调的三相交流电驱动电机,电机经过轮边减速器将动能传递到自卸车的后轮,整车主控制器采集驾驶室信号,执行驾驶员的操作意图,调节柴油机转速,下发指令给励磁控制器,控制发电机的电压输出,同时变流器接收整车主控制器的指令实现整车的前进、后退、牵引、制动等功能,制动回馈的能量通过斩波电阻以热能的形式消耗掉,矿用电动轮自卸车电驱系统示意图如图1所示。
2电驱系统控制策略
2.1柴油发动机转速控制策略
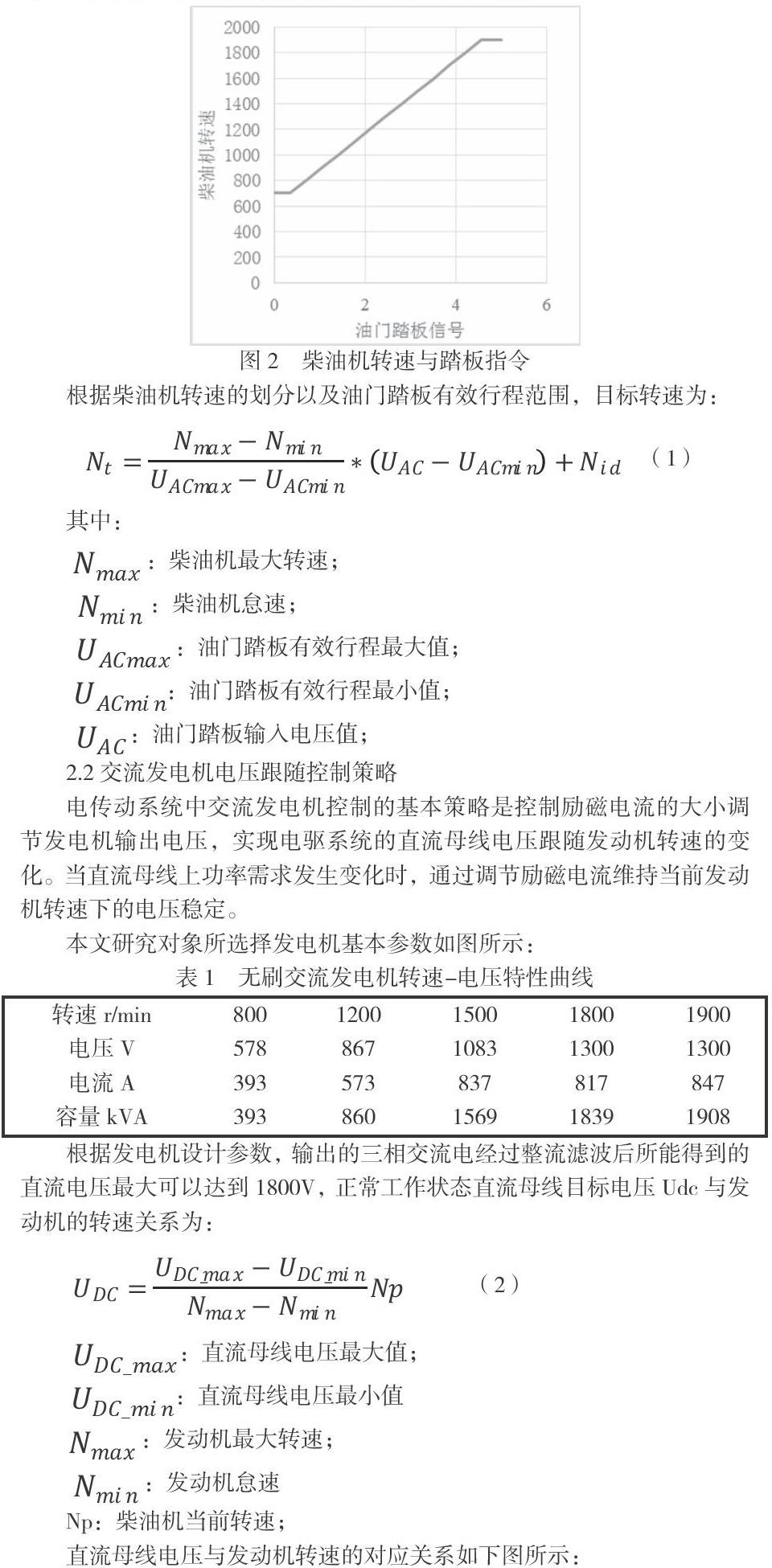
柴油机转速控制信号通过油门踏板给定,整车主控制器采集油门踏板信号根据解析算法对柴油机转速进行控制,矿用电动轮自卸车常采用频率油门PWM信号或CAN总线方式进行调速。柴油机转速主要是确定怠速与最高转速的划定,怠速阶段要考虑冷却系统等部件的功率需求,其中在电制动工况下,也要适当提升柴油机转速,以满足整车散热需求,同时也要考虑整机启动过程功率需求变化较大可能造成的转速不稳;柴油机最大转速则以最大输出功率所对应的转速点,实际在工程应用中,为避免负载突然变化而造成柴油机转速的波动,会在发动机特性曲线的基础上适当下调5%,当运行过程出现负载波动时,发动机工作点可以根据实际情况短时越过工作曲线,保持发动机的转速稳定,本文研究对象选择的MTU发动机特性曲线如图所示。
整车主控制器采集油门踏板的电位信号后,经过踏板信号与发动机转速关系换算,输出频率油门PWM信号或通过SAE-J1939通讯协议向发动机ECM下发控制指令,由于运行过程时的振动较大,踏板电位信号需要设置一段无效行程范围,油门踏板信号取最大量程的10%~90%为有效行程,柴油机转速与应油门踏板的输入电压线性对应。
根据柴油机转速的划分以及油门踏板有效行程范围,目标转速为:
2.2交流发电机电压跟随控制策略
电传动系统中交流发电机控制的基本策略是控制励磁电流的大小调节发电机输出电压,实现电驱系统的直流母线电压跟随发动机转速的变化。当直流母线上功率需求发生变化时,通过调节励磁电流维持当前发动机转速下的电压稳定。
本文研究对象所选择发电机基本参数如图所示:
根据发电机设计参数,输出的三相交流电经过整流滤波后所能得到的直流电压最大可以达到1800V,正常工作状态直流母线目标电压Udc与发动机的转速关系为:
直流母线电压与发动机转速的对应关系如下图所示:
励磁控制器以直流母线电压为控制对象,采用基于目标电压值的闭环反馈控制策略,提高直流母线电压跟随控制的稳定性,对于急加速指令,控制器根据踏板值调节目标电压值,励磁控制器采取强励方式,加快直流电压上升,以满足后端功率需求。
图中:
Udc_T:直流母线电压目标值;
Udc_F:直流母线电压实际值;
Ie_s:强励励磁电流补偿值;
当踏板模拟量值急剧增加,可以预见柴油机转速快速上升,后端功率需求快速增加,因此在实际控制之前提前引入前馈控制量,叠加强励励磁电流补偿值,对直流母线电压跟随控制具有明显的改善作用。
2.3牵引系统电机转矩控制策略
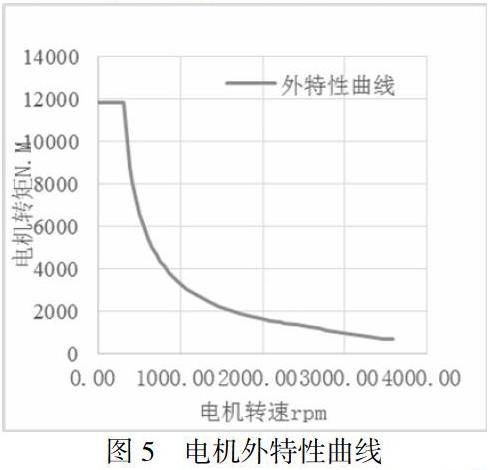
牵引系统的控制是根据驱动电机当前转速所处区间进行决策的,分為:1)电机启动状态;2)电机恒转矩区;3)电机恒功率区。自卸车处于不同行驶状态时,电机工作点会出现在不同区域,牵引系统应采取相应的控制决策,满足自卸车在该状态下的动力需求。当驱动电机转速在基速N下时,电机处于恒转矩区,此时驱动转矩较大,但转速较小,驱动功率小,需继续维持驱动力使转速增加;当电机转速大于基速时,电机进入恒功率区,此时在发动机最大净输出功率的限制下,由当前电机转速计算出目标转矩,控制电机输出目标转矩,根据与阻力矩的关系实现电机转速的变化。驱动电机在工作区域上的工作点大多能够根据电机转速进行判断,自卸车的行驶状态也基本能够根据车速进行区分。
当驾驶员给定踏板指令后,此时牵引控制系统会根据发动机转速限制最大功率曲线,根据踏板指令选择电机工作区域内的一条特性曲线,驱动电机的工作点就落在这条特性曲线上。确定电机工作曲线后,驱动电机的目标工作点由当前电机转速决定。
电机转矩Te函数可表示为:
3 结果分析
柴油机转速与直流电压如图6~图8所示,从图6可知,整车正常行驶情况下柴油机转速根据驾驶员操作油门踏板进行动态响应,发电机电压经过整流后的直流电压能够跟随柴油机转速发生变化,呈现出良好的跟随性。图7所展示了整车在电制动工况下,电机制动能量回馈,抬升直流母线电压,柴油机转速提升以满足整机散热的需求;图8表明了再急加速阶段,柴油机转速快速升至额定转速点,励磁控制器进入强励控制,保证中间电压的快速上升,由于强励原因,直流电压高于下发的直流电压目标值。
从图9可以看出,在电机起步阶段,电机转矩快速爬升进入恒转矩区,随着电机转速电机转矩有所下降,同时转矩也受踏板指令限制,转矩分布在不同的特性曲线下。
结语
针对矿用电动轮自卸车电驱系统动力性能问题,本文提出了柴油机转速控制策略、发电机电压跟随控制、电机转矩控制决策,通过实验可知,本文提出的控制策略是可行的,能够满足矿用电动轮自卸车的控制需求。对电动轮自卸车电驱系统。
参考文献:
[1] 孙会来.轮边电驱动铰接式矿用汽车差速控制策略研究[J].农业机械学报.2014(11)
[2] 张晓清.基于DSP的自卸车电传动控制系统的设计[J].矿山机械.2009(01)
[3] 张云.大型电动轮自卸车的控制系统设计与研究[D].湖南大学.2006
[4] 汤双清.电动轮驱动技术研究[J].机械工程与自动化.2009(02)
[5] 张伟旗.大型矿山电动轮汽车发动机自主研发及关键技术研究[J].有色设备.2014(06)
作者简介:唐勋路(1990- ),男,湖南长沙人,硕士研究生,主要从事矿用电动轮自卸车牵引变流器方面的研究,电子信箱:tangxl602@foxmail.com .
湖南株洲石峰区时代路169号,中车株洲电力机车研究所,18573182060
