基于3D虚拟现实技术的雷达维修虚拟培训系统设计
2020-12-08马景奕
马景奕
(1.甘肃省气象局,兰州 730000; 2.兰州大学 大气科学学院,兰州 730020)
0 引言
配置维护的相关技术人员,邀请相关专家参与,用此方法完成维护过程,确实能起到保证维修可靠性和培训相关技术人员的作用[1]。但是,这只适用于系统结构比较简单、复杂度较低的原装雷达设备。高技术设备在实际生活上的大量投入,提高了雷达设备的技术水平,必须需要更多专家参与[2]。专业人才缺乏会导致雷达故障诊断的不准确,不但不能提高工作效率,而且可能影响设备。由于专业检测技术的使用成本高,数量少,对维修人员的技术水平要求也很高,这就给维修虚拟培训内容带来了困难。维护人员要有较高的技术地位和维护水平,就必须进行大量的长期培训,急需一套行之有效的培训方法[3]。仅仅依靠大量技术人员的投入来维修雷达设备,这种“有组织”、“指挥”的传统维修方式已经不能适应高技术条件下雷达维修需要,必须进行新的维修方式探索[4]。针对这一背景,提出了基于3D虚拟现实技术的雷达维修虚拟培训系统的设计思想。雷达维修虚拟训练系统完美利用了3D虚拟现实技术,实现用户的真实全景体验,也实现了雷达维修过程的交互式控制,极大地提高了保障信息的可信性。
1 硬件结构设计
按照功能要求和设计思想,图1显示了雷达维修虚拟培训系统的硬件拓扑结构。

图1 雷达维修虚拟培训系统硬件结构设计
系统硬件结构主要是由显示器、控制台、投影仪、信号处理柜、伺服驱动柜、配电柜、转盘柜、高频盒分机等组成,展示台、信号处理柜、伺服驱动柜、配电柜、高频分机箱等均按实物1:1制作安装[5]。
1.1 转台分机
转台扩展控制模块很小,结合高频盒扩展,将其放在单盒中,将拨盘(虚拟故障)和连接器安装在印制板上,利用仿真软件实现转台分析控制功能[6]。
图2显示了每个分机扩展的内部组件虚拟器结构。
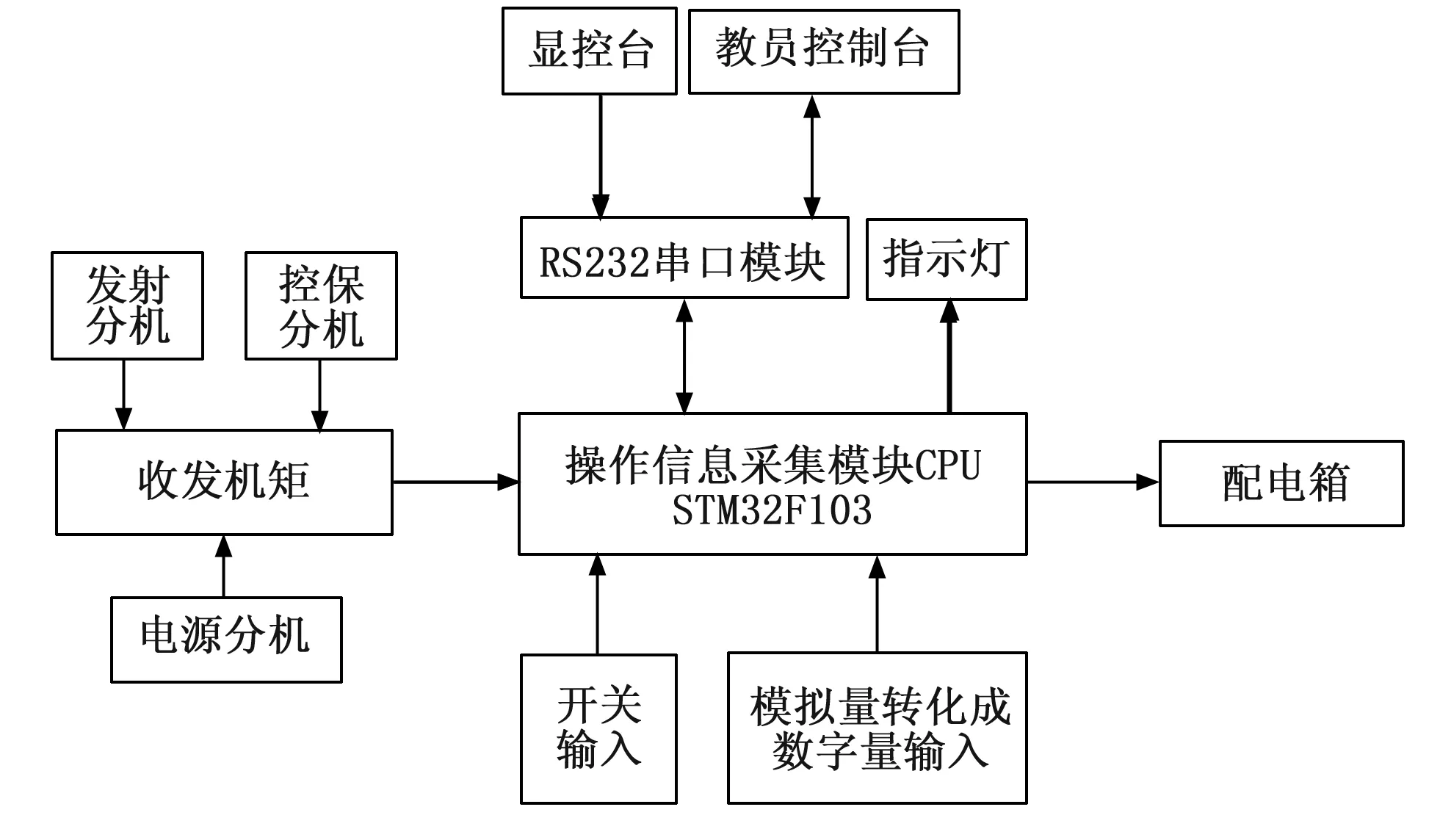
图2 分机组件虚拟器结构
为方便设计,每一个部件都要有统一的尺寸,这样印制板的尺寸也一样。印刷板上的所有部件都是一样的,但定义不同[7]。各个分离器内部部件采用统一的箱式和印制板结构,便于模块化设计和实现[8]。
1.1.1 教员控制台
通过对教员控制台的设置,实现了雷达外导台、局部基准、时间控制等设备的仿真,并对各雷达分机故障设置状态进行了实时监控[9]。教员控制台有一个雷达虚拟系统的电源开关和一个投影电源开关,用以控制整个系统的运行。该系统实现了对雷达目标的跟踪,仿真了雷达搜索跟踪目标的全过程[10]。
1.1.2 显控台
显示器控制台通过串口直接与各接口通讯,显示控制台上还安装了8串口卡[11]。每一次扩展的故障状态变化都同时发送到教员控制台,还可以通过串口发送到显示器。这样就可以判断故障位置,给出不同故障现象,显控台通过串口向每个扩展发送操作指令[12]。
教员控制台通过网络端口直接与显示控制台相连,教员控制台计算机上有8个串口卡,通过串口卡与其它设备连接,并通过串口将故障设置状态发送到指导控制计算机中[13]。
1.2 天线
对于天线部分的设计,由于系统安装了大量的机械零件,如果采用物理虚拟,则成本较高,实际效益较低,因此采用3D数据显示的方法。天线3D显示软件也运行在指令控制的电脑上[14]。通过屏幕扩展,将操作结果投影到120英寸投影屏幕上,输出到投影仪上。高效而直观[15]。天线的结构设计采用耦合馈电连接方式,见图3。
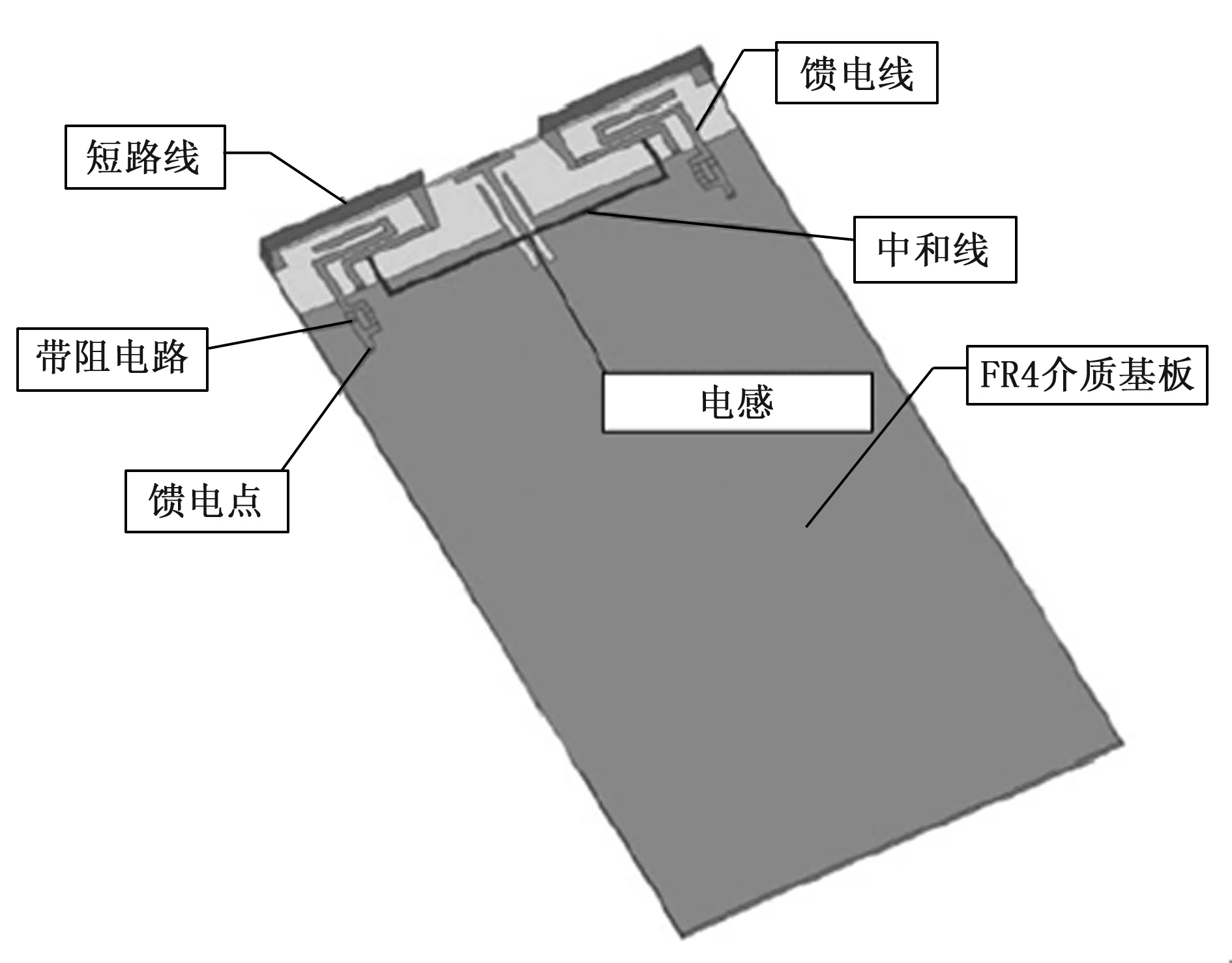
图3 天线结构
该系统包括两个天线单元,其结构各尺寸分别为10 mm×22 mm和10 mm×60 mm,两个天线单元之间的距离只有16 mm,与馈线构成直接馈线部分,用来连接两个长为50 mm天线元件的u型金属线,比低频谐振点长得多。微带金属线旨在实现低频解耦,一个t形的地面分支被添加到天线的背面,该结构主要是用来减少高频段两个天线元件的耦合。
1.3 配电箱
针对维修虚拟训练系统的实际供电需求设计配电箱接线方式,如图4所示。
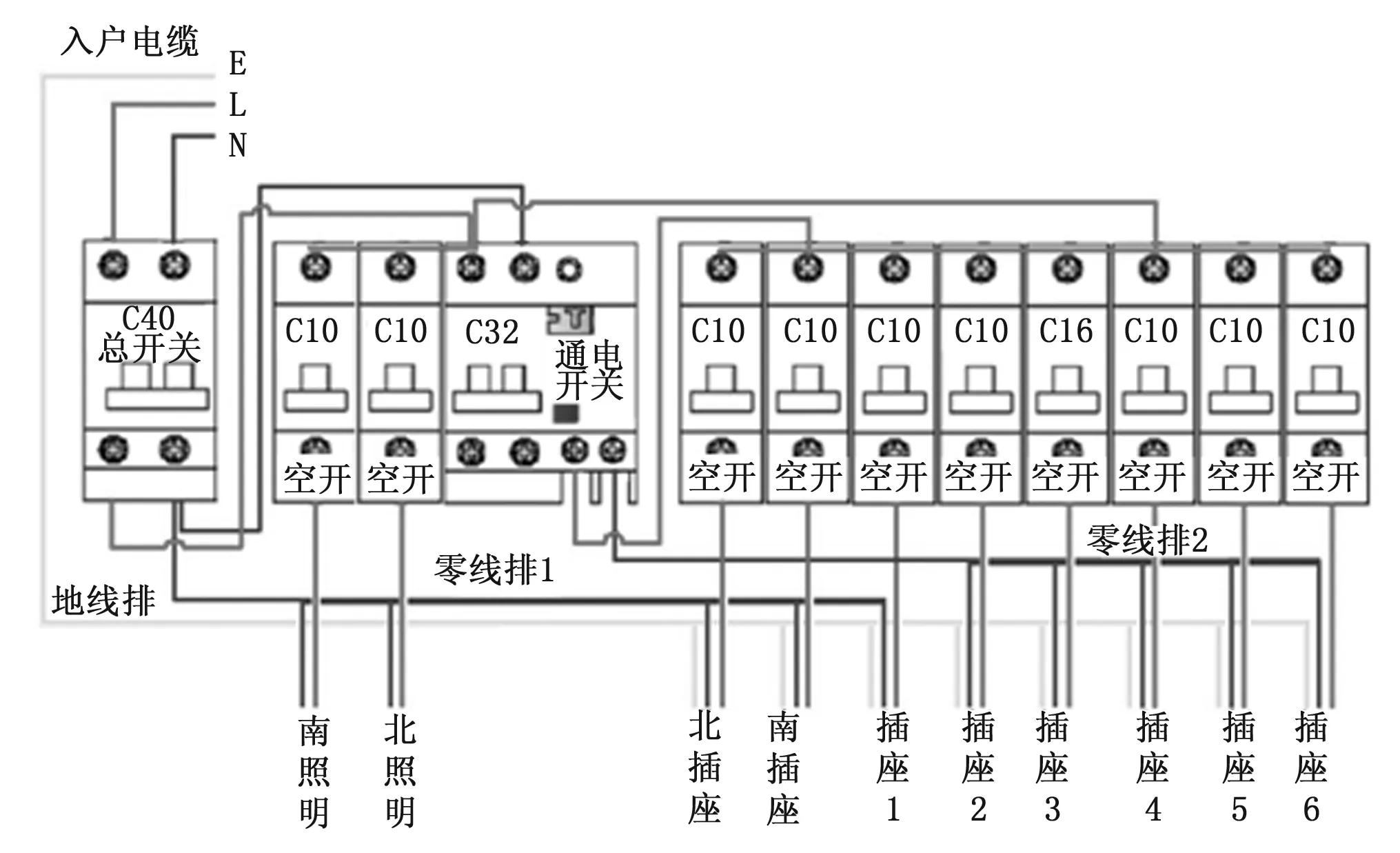
图4 配电箱接线图
通过图4可以看出,系统主要将主三相380 V电源转换为多个AC220V输出显示器,利用控制台和收发室实现电路连接,通过空气开关和引信将指示灯安装在面板上。
1.4 收发机柜
1.4.1 控保分机
控制器扩展设计是基于实际安装的,配置15个LED指示灯,多个相关仪表、变送器开关及其它相关旋钮。分配器用来监测变送器的工作状态,完成分配器的切换、延迟控制,内部电路设计了故障检测接口板、开关控制逻辑板和信号设定板,并进行了安全扩展。变送器不同位置的故障信号具有不同类型、不同幅度等特点。错误检测界面板将一些错误信号的 LED错误指示转换为信号形式显示在驱动面板上。开关控制逻辑板能够控制维护虚拟训练系统,确定训练故障源。
1.4.2 发射分机
发射分机系统由触发板、开关板、偏置板和脉冲放大板四部分组成。在脉冲放大电路中,从定时器开始和审查脉冲信号放大,转换成由触发器启动信号板,然后触发开关管的开关板产生主调制脉冲,最后移除 DC偏压,再将电网调制脉冲加到网格行波管中。它能够通过击穿保护的方式保护浮动源。
1.4.3 接收分机
该部分主要用于接收整机定时信号和雷达辐射所需的雷达信号。接收分机配置了CF5135C型号计时器面板、JDS2800型号信号源面板、 MC3361BP中频放大器和FS-V11型号视频检测放大器。每块板都装在一个插件箱里,通过机箱主板提供所需的电源和控制信号。
2 软件部分设计
2.1 基于硬件加速的软阴影技术
软阴影技术是基于阴影图的3D软阴影处理技术,投影映射方法是从光源角度渲染场景的深度信息到纹理,然后比较场景渲染时的深度信息,以判断像素是否位于阴影中。它解决了透明纹理在模型阴影模式下的阴影投影问题,并且可以很容易地软化阴影边缘,使阴影效果更真实。
图像滤波分为空域滤波和倾斜域滤波,其主要作用是对图像进行去噪处理,空域滤波是以原始图像为数据源的一种直接滤波方法,频域海滩波是一种间接滤波方法,它首先将图像转换到频域空间,然后再对其进行处理,从而实现对图像的直接计算。采用空域滤波技术对阴影贴图进行了滤波处理。为此,着重研究了这种滤波方法。空域滤波实质上是邻域运算,若目标像素的邻接像素作线性计算,计算结果作输出像素,称为线性滤波,否则为非线性滤波,其像素值结果计算公式为:
T=λ1T1+λ2T2+…+λnTn
(1)
公式(1)中,λn表示像素所赋予的权值;Tn表示邻域像素数值。
直线滤波减小了图像的变化量,提高了平滑度。在阴影贴图技术中,它更适合阴影边界的渐变平滑。生成阴影贴图是相当简单的,通过输出光源空间中每个像素的深度值到像素处理程序的相应纹理,就可以得到阴影贴图。图5中显示了硬件加速过程。
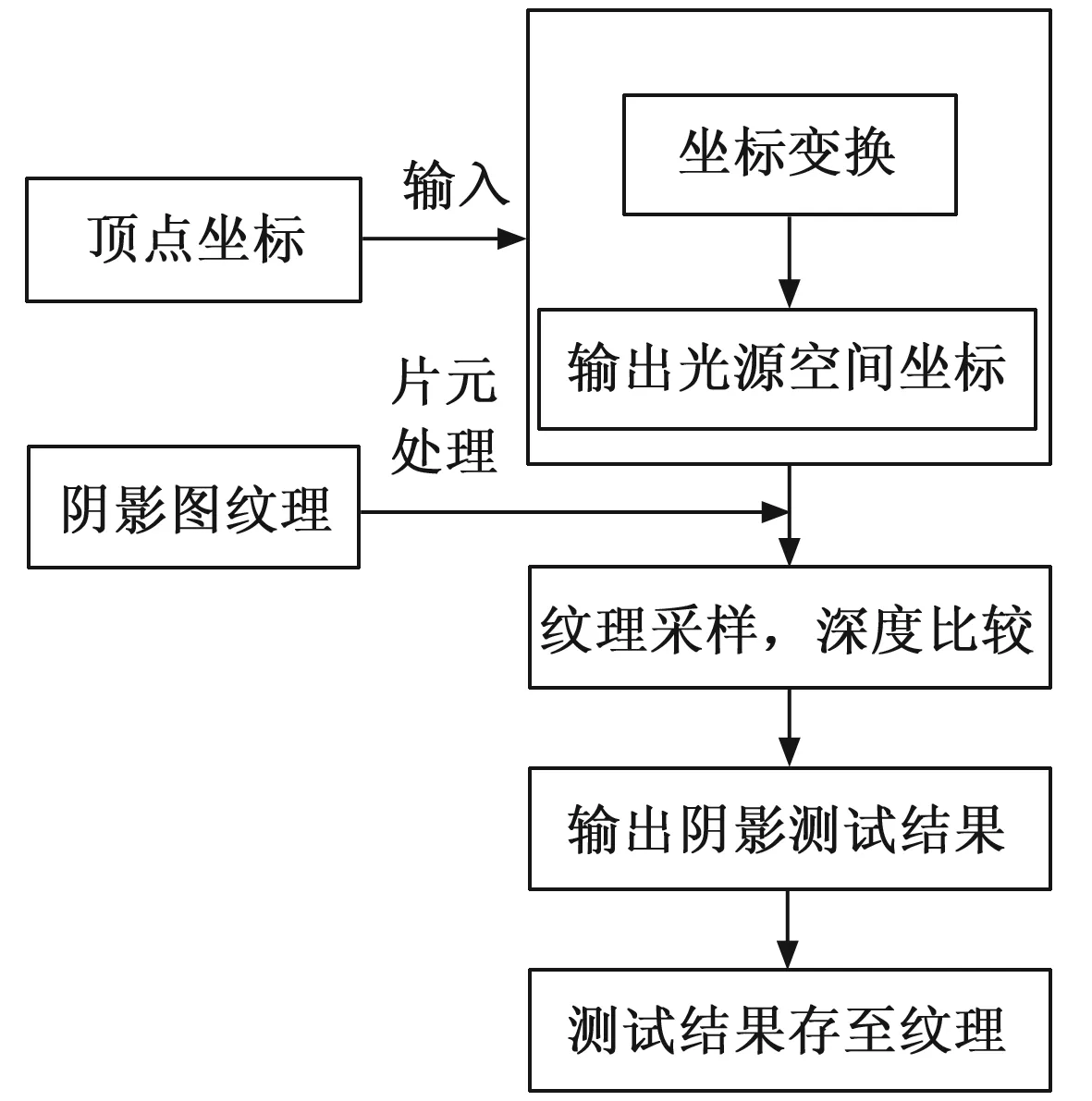
图5 硬件加速流程
硬件加速时,首先计算出光源顶点坐标空间和对应的阴影顶点处理器映射纹理坐标,然后装载该纹理映射处理器采样获取对应深度值,最后得到焦点,即光源距离。其结果用0或1表示,并存储在特定纹理中。
2.2 虚拟培训流程设计
训练过程采用了一种雷达维修虚拟训练系统,训练过程可以分为四个步骤:选择训练对象,系统初始化,装备训练,效果评估,如图6所示。
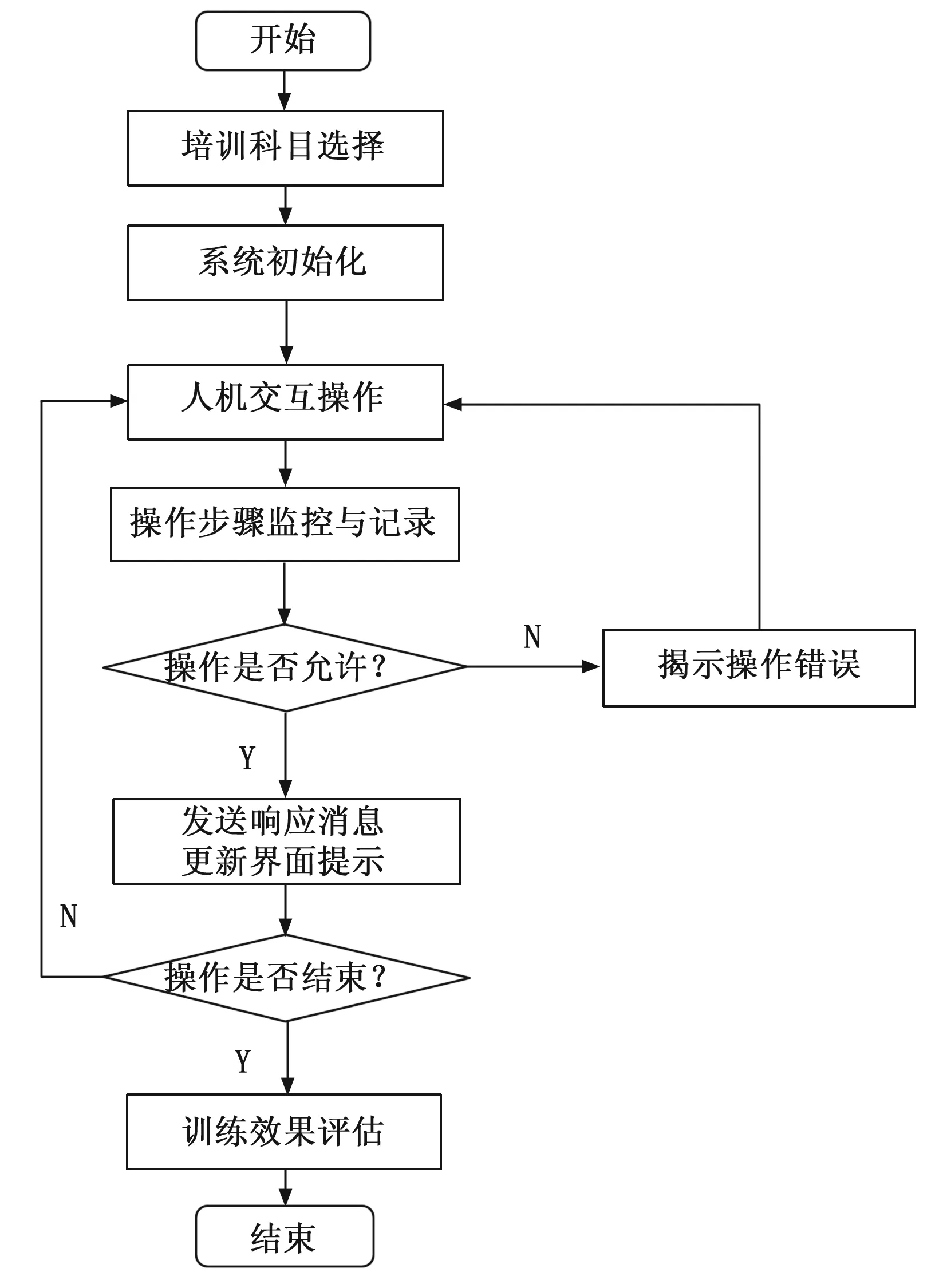
图6 虚拟培训系统基本流程
1)训练目标的选择:系统启动后,根据训练计划在主界面上进行训练目标的选择,并对系统进行初始化;
2)系统初始化:读库数据,载入实际环境中,雷达维修结构展示模型,装备机制模型,初始装备状态设定;
3)装备训练:在对设备进行操作培训时,操作者可以利用键盘、鼠标等人机交互设备提供相应的提示信息,系统可以实时记录下操作步骤。
4)培训效果评估:系统在运行结束后,利用运行过程数据和训练效果评估模型对训练效果进行评估,并显示评估结果。
3 实验
为了验证基于3D虚拟现实技术的雷达维修虚拟培训系统设计合理性,进行实验验证分析。以某型雷达为验证平台,分别采用投入维修人员技术、专家测量技术与3D虚拟现实技术对系统培训效果进行虚拟实验,并对故障维修结果和实际情况展开分析。
故障虚拟试验中出现的故障情况如表1所示。
表1 故障情况
针对这四种情况,雷达显示情况如图7所示。
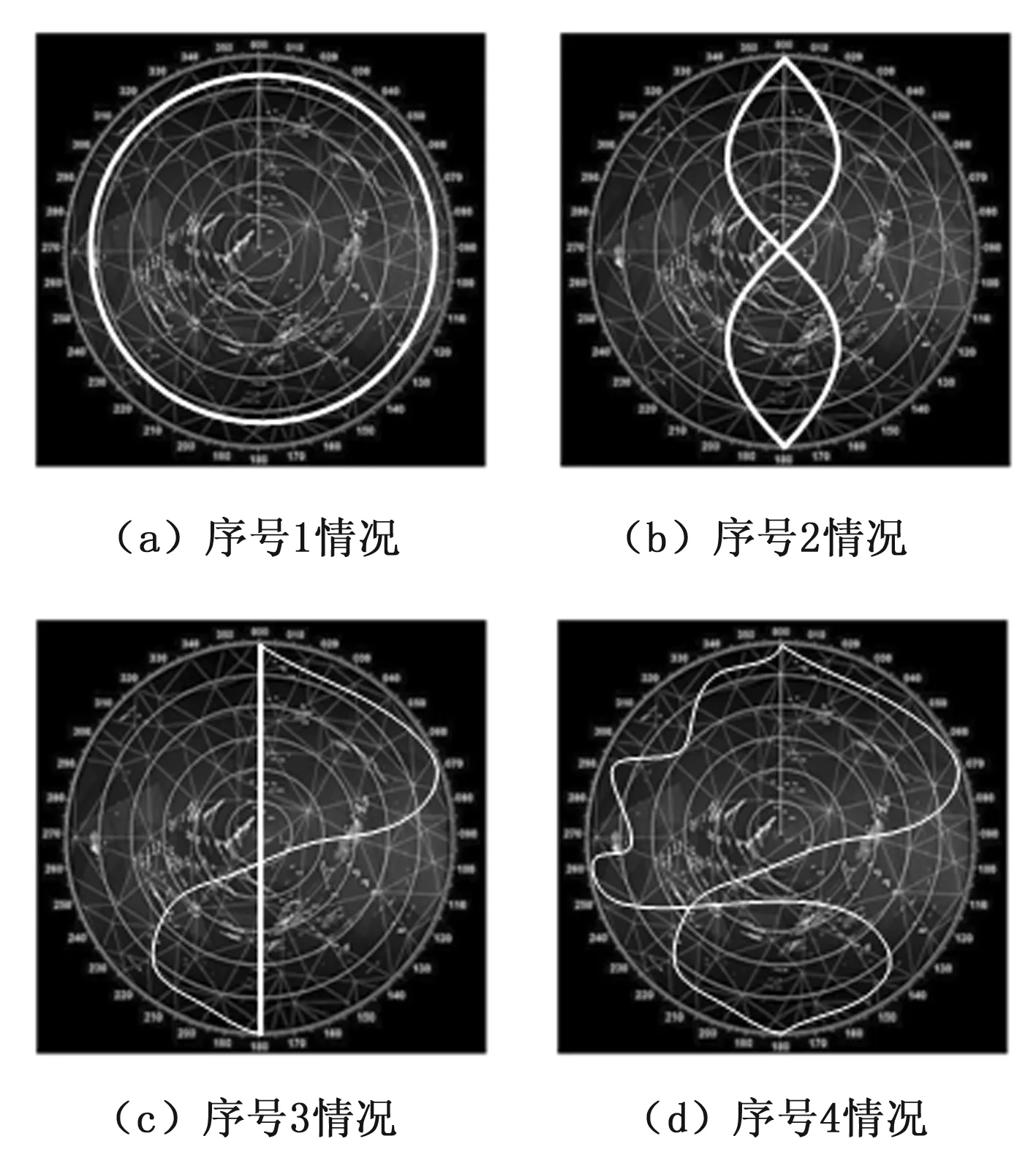
图7 雷达显示情况
序号1情况下雷达信号是呈完整圆圈形式的,序号2情况下雷达信号是规律性的,上下变化幅度一致;序号3情况下雷达信号出现部分无规律波动现象;序号4情况下雷达信号出现大部分无规律波动现象。
分别使用投入维修人员技术、专家测量技术与3D虚拟现实技术对雷达信号显示结果展开对比分析,结果如图8所示。
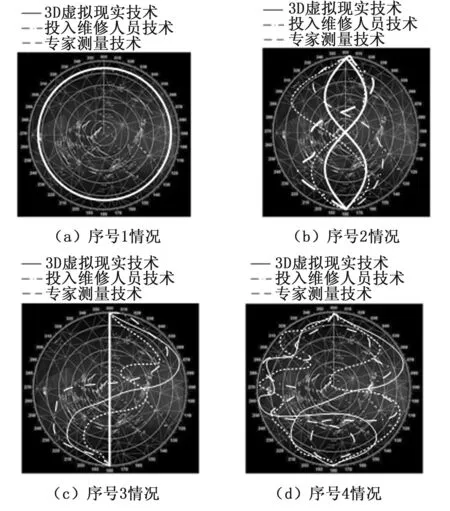
图8 三种技术雷达信号显示结果
由图8可知:使用投入维修人员技术与专家测量技术雷达显示结果与实际情况相差较大,尤其是序号4情况波动幅度最大,且信号与实际相差最大;而使用3D虚拟现实技术雷达信号显示结果与实际结果一致。
为进一步验证该系统设计合理性,需将三种系统培训内容加以分析,结果如表2所示。
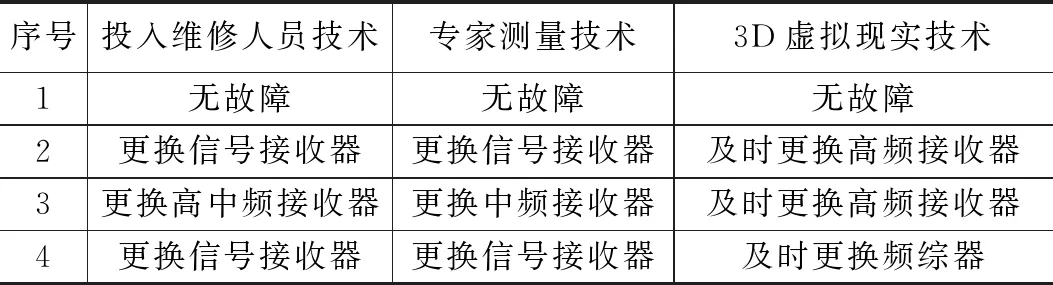
表2 三种系统培训内容
由表2可知:使用3D虚拟现实技术能够针对各种故障问题展开深入研究,通过及时更换高频接收器能够处理断开总单元电缆问题;通过及时更换高频接收器能够处理断开处理单元副1路电缆问题;通过及时更换频综器能够处理断开处理单元副1路电缆、2路电缆问题。而其余两种技术故障处理效果较差,也说明利用这两种技术设计的系统会给培训带来误区。
通过实验对比结果可知,基于3D虚拟现实技术的雷达维修虚拟培训系统设计是具有合理性的。
4 结束语
雷达维护虚拟培训系统是基于3D虚拟现实技术开发的,可以使学员在不依赖于真实设备的情况下进行真实的教学和训练。本系统适用于多个专业的设备运行维护教学与培训实践,充实教学培训手段,提高学员参与培训的积极性,有效地提高设备化教学培训效果。该系统的设计可供其它设备虚拟维修训练系统开发时参考,具有一定的实用价值和参考意义。研制的雷达维修虚拟训练系统在航空航天、汽车运输市场有着广阔需求和发展前景。但是由于时间限制,该系统目前仍需进一步投入使用,在接下来的研究中,将以完善网络功能为重点研究方向,以期为用户提供更多的培训服务。
