交会对接多航天器联合闭环测试模式设计与验证
2020-12-08杨枫,任亮
杨 枫,任 亮
(1.南京航空航天大学 航空宇航学院,南京 210016; 2.中国空间技术研究院,北京 100094)
0 引言
在载人航天领域,多航天器交会对接技术是研制的关键和难题,交会对接闭环测试系统设计的重要性尤为突出,主要解决飞行任务阶段,多航天器交互状态的验证问题,突破了系统电测中多维度测试的关键技术,为顺利完成电测任务提出保障。
多航天器交会对接地面测试核心思想是将载人飞船和目标飞行器融合成一个整体的测试对象,以统一的操作使其协调一致地同步完成远距离导引、自主控制、交会及对接、停靠及组合体运行、分离与撤离、二次对接等交会对接各主要环节,在地面真实呈现交会对接飞行的全过程,达到多船器联合电测的目的。
1 交会对接闭环测试系统设计
多航天器交会对接地面测试任务主要是完成任务对应各阶段(自主飞行阶段、目标飞行器与载人飞船交会对接段、目标飞行器与载人飞船交会对接准备、交会对接、组合体、撤离段,与货运飞船交会对接段、目标飞行器与载人飞船交会对接准备、交会对接、组合体、撤离段)的状态设置、状态切换、状态模拟和状态数据确认。地面通过对飞行程序对应的各飞行状态的时序控制的协调性、接口的匹配性、信息传递正确定等进行测试,并对多航天器各部件的工作状态及相互间的配合状态进行充分验证。
根据交会对接测试任务的要求,用于交会对接的多航天器联合电测闭环测试系统主要需求如下:
1)并行开展多航天器电性能测试,并实现交会对接数据闭环验证;
2)在交会对接总线数据交互中,通过总线模拟、总线数据分析、判读实时对比并分析目标飞行器代传总线数据;以测试激励和数据驱动实现测试过程的实时模拟、反馈和精度控制;
3)通过多数据源下行通道,进入数据中心,实现多航天器多通道信息流的控制处理与协同工作。测试往来载人航天器之间信息交互通道及信息流的正确性;
4)测试往来载人航天器交会对接敏感器和控制执行设备的工作协同性;测试往来载人航天器对接分离时序和控制回路的正确性。
交会对接闭环测试系统方案设计如图1所示。

图1 交会对接测试系统设计
1)基于多通道下行多数据流并行计算特点,建立以总控为核心的柔性框架测试系统,图1所示(包括地面供配电设备、测控设备、数管设备、仪表设备,以及分系统模拟器设备),在原有综合测试系统的基础上,增加交会对接关键设备(对接机构模拟器、推进补加模拟器、对接总线模拟器、供电并网控制器)等,系统可在此基础上进行调整和扩展;
2)在自动化测试系统上,实现单航天器、多航天器并行、交会对接组合体三种状态切换,并实时动态同步,数据遥测作为驱动,结合模拟源数据激励形成数据闭环回路,建立回路上的测试系统;
3)利用飞行任务中对飞行程序任务段进行分解,建立飞行阶段、飞行时间、飞行指令、下行遥测等层级的分层模型,利用多航天器联试和接口验证等手段,使用模拟器实现动力学模型、接口协议、程序的验证,实现航天器间电气接口的正确性确认。
4)通过统一的数据中心,将多飞行器状态管理、自动化测试技术、交会对接动态仿真监视系统,整合多通道间的通信链路,使得测试数据同步一体化,并通过并行数据处理,实现多通道多吞吐量数据实时入库,实现交会对接多航天器同步数据的实时性要求。
2 交会对接闭环测试系统实现
基于交会对接测试任务需要,同步模拟交会对接时序、组合体时序、绕飞时序,同步模拟对接机构的机电系统动作,验证空空通信、总线通信、控制与推进系统相互协调性和匹配性。在多航天器电测中实现同步的动态模拟飞行和信息交互。
2.1 基于开放式构架一体化测试系统
为实现多航天器联合电测,测试系统采用开放式构架,形成以总控系统为核心,由控制台统一执行操作的一体化管理控制模式,各分系统专用测试设备主机接受总控设备的统一控制和命令设置,并对其它分系统相关测试设备进行控制。该开放式测试系统采用高可靠性、高通用化、高集成度的软硬件构成柔性系统,可根据需求组合叠加,通过硬件设置和软件配置调整,即可实现单船、单器电测模式与船器联合电测模式之间的灵活转换。系统构建方案如下:
1)测试系统划分为服务区、前置区、操作/应用区三大组成部分。其中服务区部署的总控后台数据中心系统为统一核心,负责网络通信、数据处理及存储、查询及判读服务支持、GPS校时等功能。为每一航天器配有一前置区负责与被测航天器的直接交互,包括供配电、指令上行发送、数据下行接收、总线仿真监视、动力学模型驱动等。为每一航天器配有一操作/应用区,提供控制台和数据监视/查询终端,供测试人员执行测试操作,以及测试数据访问。
2)单船、单器测试时,由服务区和一套与其对应的前置区、操作/应用区构成测试系统,对单一航天器实施电测;船器间多航天器联合电测时,以服务区为统一控制的枢纽,将每一航天器的前置区、操作/应用区通过信息流的实时融合,形成一体化的船器联合测试系统,航天器间则通过空空通信和对接总线交互,并由测试系统通过上行指令和下行遥测构成的大回路闭环控制形成一体,并通过服务区的GPS时统校时,实现统一时间基准下的全系统动态同步联动。
3)由于测试系统中的设备采用开放式的通用化模块化设计,并采用虚拟仪器、软件无线电等柔性设计,使前置区、操作/应用区具有良好的通用互换性和使用弹性,在单航天器电测和多航天器联合电测之间转换时,仅需进行少量的硬件设置调整,并更换软件配置,即可实现快速的模式转换,测试准备所需时间不超过2周。
2.2 对接分离时序联合闭环测试同步一体化设计
对接机构是完成交会对接任务的重要组成部分,其关键性环节在于对接和分离两个过程对机械组件的时序控制,因此必须对对接和分离过程的时序设计正确性合理性,以及对接机构与船、器相关设备控制与信息传递的协调性进行测试。为此针对对接分离时序设计了专项测试方案如下:
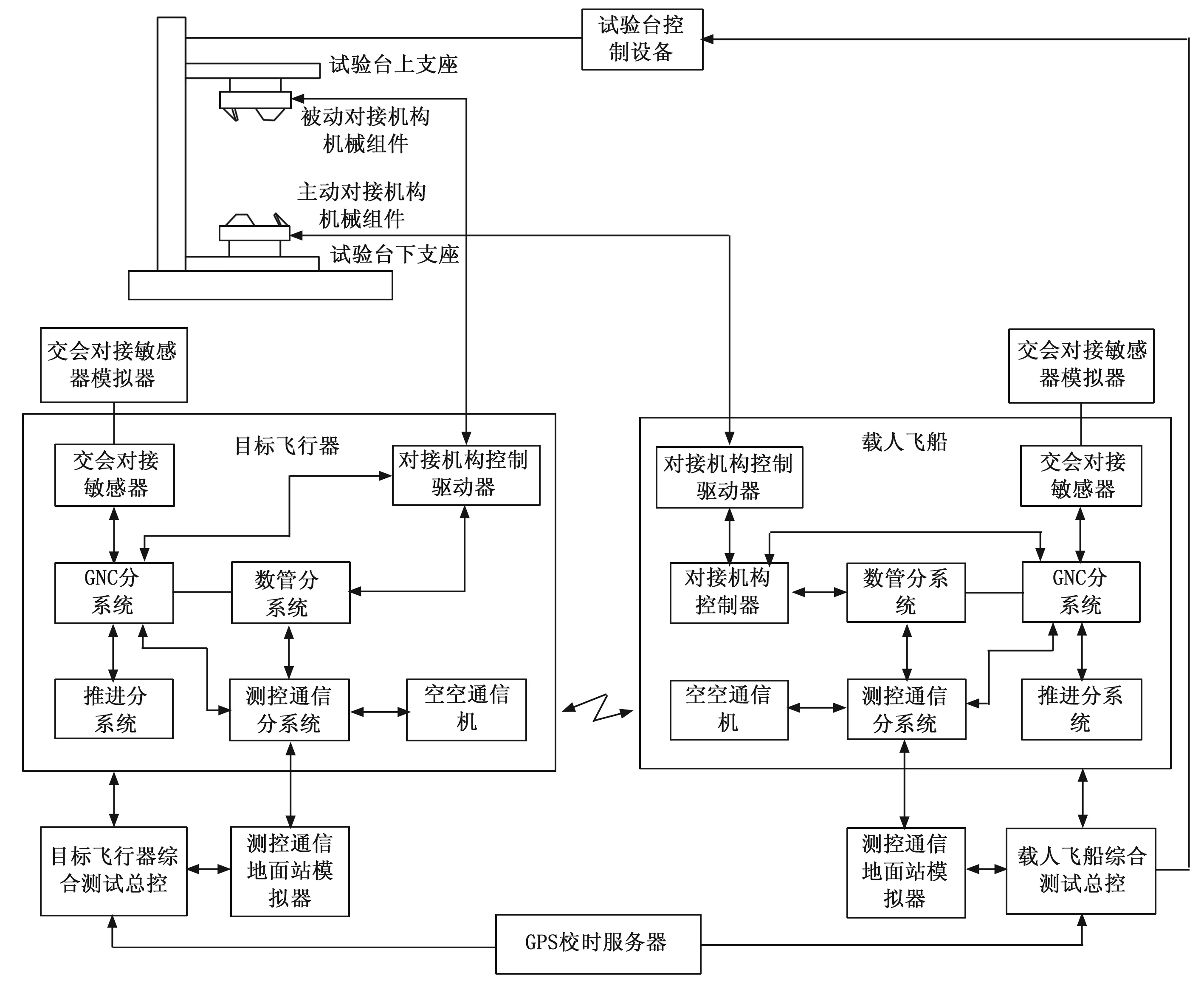
图2 对接分离时序联合闭环测试同步一体化设计与实施示意图
1)对接分离时序试验执行船器正常联合模飞中的二次对接过程测试序列,并引入了对接分离时序试验台驱动真实对接机构机械组件的轴向运动,实现对接分离过程的验证测试。
2)测控通信及数管分系统获得GNC实时测量的载人飞船相对目标飞行器的轴向相对距离、轴向相对速度等信息,通过遥测系统下传至综合测试总控,当处于试验设定的轴向相对距离范围后,由综合测试总控控制对接分离时序试验台控制设备,试验台控制设备控制试验台上支座带动被动对接机构机械组件,使其按照轴向相对速度Vx相对主动对接机构机械组件进行实时同步的轴向上下运动,从而实现两航天器的相互接近和分离的实时动态同步一体化仿真模拟。
3)由飞船综合测试总控根据来自遥测数据的真实接触信号或分离信号控制试验台控制设备,试验台控制设备启动试验台随动功能,实现试验台上支座上下运动随动和下支座水平转动随动,同时两航天器对接机构机械组件按程序自动同步完成接触、捕获、缓冲、推出、拉回、锁紧、复位、解锁、分离推杆推出等的对接分离全过程动作。
2.3 多航天器模拟飞行程控指令大回路解析
在交会对接过程中,多航天器协同合作完成交会对接以及组合体飞行中,产生了多通道的指令和数据信息流:空间站往来飞行器通过空空对接设备产生的遥控指令和遥测参数,对接总线设备产生的遥控指令和遥测参数;往来飞行器通过空间站代传下行的遥测参数;
实现多航天器间多通道指令和数据信息流的控制和处理就尤为重要,图3所示,相对于单飞行器试验,多飞行器通过联合控制台和数据中心对多航天器联合试验过程中多通道大回路指令和数据信息流的动态同步及实时融合,用户可在统一的数据环境中通过订阅飞行器或组合体的指令和数据信息,使同步一体化呈现,对指令和数据进行同步的联合比较。
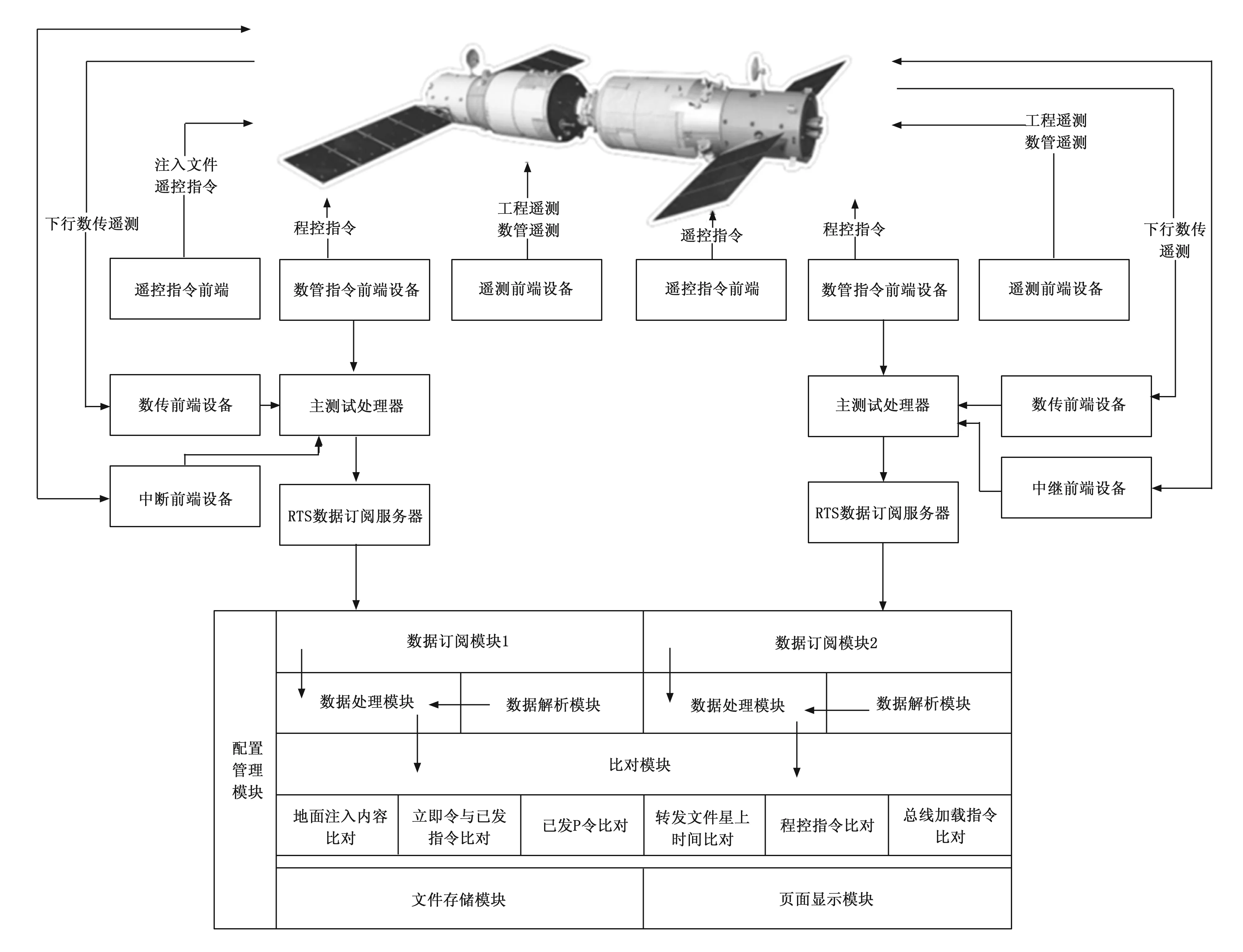
图3 大回路比对图
实现多航天器间多通道大回路指令和数据信息流的有效控制处理及判读是交会对接测试的关键性环节,在系统设计中采用一种大回路比对的方法。航天器模拟飞行程控指令大回路解析与比对技术通过对航天器遥测数据的解析,获得与指令和文件发送相关的数据,对数据进行比对、分析,判断航天器接收和发送指令的各项功能和性能是否满足设计要求,确保测试准确性、正确性,对其设计和实施方案如下:
1)飞船总控对所有飞船指令及下行数据(包含来自目标飞行器的数据)进行发送及解算存储;
2)目标飞行器总控对所有目标飞行器指令及下行数据(包含来自载人飞船的数据)进行发送及解算存储;
3)通过联合控制台和数据中心对飞船和目标飞行器数据实现多通道大回路指令和数据信息流的动态同步及实时融合,用户可在统一的数据环境中通过自定义页面自由订阅任一航天器的指令和数据信息,使其同步无缝衔接并一体化呈现,对指令和数据进行同步的联合交叉比对处理分析。
在航天器模拟飞行测试中,可以极大的提高测试效率,降低误判和漏判率,该系统包括数据订阅模块、数据解析模块、内容比较模块、时间比对模块、文件存储模块、结果查询模块、界面显示模块、配置管理模块,其指令比对工作流程如图4所示。
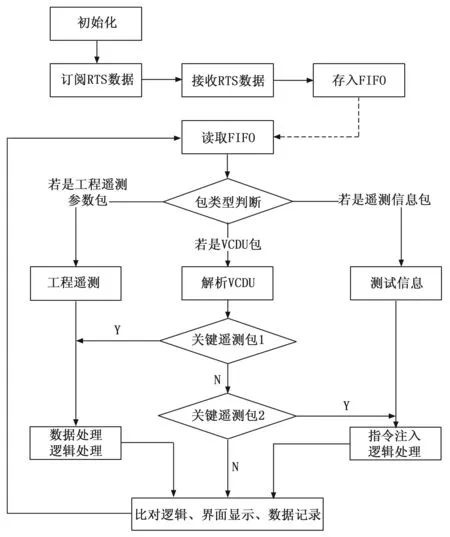
图4 指令比对工作流程图
2.4 “零”米信号设计
多舱联合测试,需要检验各舱间接口匹配性,空间站各舱段航天器采用各自总控设备,指令控制、数据处理、判读由各自总控系统独立执行,测试数据可以代传共享,具备指令、参数交互能力,对接及转位机构能够接收其他往来飞行器GNC发送的零米信号和货船总控发送的分离开始指令;
通过对接机构模拟器模拟对接机构交会对接和分离过程中的机电动作,由综合测试总控网络实现多航天器对接机构模拟器之间的同步控制。以飞船对接目标飞行器为例,由飞船动力学仿真模型驱动源根据两航天器相对距离给出“零米”或“分离开始”信号,模拟对接机构接触状态,送飞船综合测试总控,作为交会对接关键事件触发条件。飞船综合测试总控将此信号转发给载人飞船对接机构模拟器,同时传送至目标飞行器总控并转发给目标飞行器对接机构模拟器,两航天器对接机构模拟器根据此信号进行同步。飞船对接机构模拟器在接收到“零米”或“分离开始”信号后,直接将动作控制信号转送给目标对接结构模拟器,实现两模拟器的机电系统同步做出连续模拟对接或分离动作。
GNC分系统将零米信号按照设备通报信息格式送至综合测试总控主测试计算机(MTP),对接机构分系统的对接机构模拟器向数据订阅服务器(RTS)订阅零米信号。零米信号的发送格式见表1。

表1 零米信号信息格式
信息体为ZM,代表零米信号(zero meter),为ASCII码表示,2个字节。MTP将测试序列运行状态信息向测试局域网广播。
3 实验结果与分析
多航天器联合闭环测试系统完成了多次船器联合测试及发射场测试任务,验证了多航天器联合测试及大系统联试期间系统时间同步及指令控制同步。顺利完成测试任务:
1)实现多航天器间指令判读100%、参数判读95%以上,验证30 000余参数,3 000多条指令全覆盖,实现了100%飞行事件的自动判读。
2)联合电测系统时间精度优于1 s。
3)多航天器间指令发送间隔不大于1 s。
4)航天期间对接机构时序同步控制时间延迟<200 ms。对接分离同步控制通信时间延迟<1 s。
实验结果表明,多航天器联合闭环测试系统的设计与验证实现了传统方案难以满足的多航天器协同飞行以及同步动态时序动作的1:1真实模拟测试条件,充分覆盖了在轨工况,节省了数据处理运算量需求,同时降低了约30%的判读工作量,提升了电测水平,缩短了研制周期。
4 结束语
用于交会对接的多航天器联合闭环测试的设计与实施,实现了多航天器间的一体化实时动态同步电测,实现了多航天器及其测试系统的时序同步,以及敏感器及其模拟器和机电系统的动力学模型同步动态联合实时驱动的同步控制,采用了多航天器一体化实时精确控制的自动化测试,以及多航天器间多通道大回路信息流的实时统一管理。该系统的设计优点在于:
1)采用了通用化模块化的柔性开放式测试系统设计,测试模式调整转换灵活快捷,使测试及测试准备的效率和进度大幅度提高。
2)成功利用0米信号差分GNSS相对定位仿真模拟、数管对接仿真模拟、交会对接敏感器仿真模拟、动力学仿真等仿真模拟技术,完成两航天器交会对接设计的验证,经地面测试和实际在轨飞行的比对,仿真模拟技术达到了预期应用效果;
3)交会对接任务模拟飞行程控指令大回路比对技术,程控与遥测大回路比对。地面上行数据通过航天器多通道回环下行与地面存储数据交叉比对。
4)实现多航天器联合测试期间测试系统时间与指令控制同步、航天器测试数据信息交互、代传,验证航天器交会对接过程中指令控制与信息交互技术。
