履带车辆双电机耦合驱动系统同步特性
2020-12-08李春明盖江涛袁艺周广明
李春明, 盖江涛,2, 袁艺,2, 周广明,2
(1.中国北方车辆研究所, 北京 100072; 2.车辆传动重点实验室, 北京 100072)
0 引言
车辆直驶稳定性是指驾驶员不修正方向,在平直路面上车辆保持行驶方向不变的能力,是衡量履带车辆的一项重要指标。减小驱动系统两侧输出差异、保证驱动系统两侧输出同步,是提高车辆直驶稳定性、降低直线行驶过程中驾驶员工作强度的关键。履带车辆行驶环境复杂,直驶工况下两侧负载不可能随时保持一致。双电机耦合驱动车辆两侧主动轮之间无刚性连接,两侧驱动电机输出转矩相同而负载转矩不同,则必然导致电机转速不同而使驱动系统两侧输出不同步,从而无法保证车辆直驶。另外,两侧电机特性不一致也将导致系统输出不同步。文献[1]对双电机独立驱动履带车辆的直驶稳定控制进行了研究,提出了基于速度反馈的位移补偿算法,使车辆具有较小的直驶偏移量;文献[2]提出了基于模糊规则的转矩补偿方法来解决双侧电机独立驱动履带车辆直线行驶两侧电机同步控制问题。目前,双电机驱动系统直驶同步性能主要依靠控制策略来实现,并且主要针对双侧电机独立驱动系统,但是对双侧电机耦合驱动系统同步特性方面的研究较缺乏。
本文针对双侧电机耦合驱动系统输出同步问题,分析了耦合机构负载均衡作用,研究了双电机耦合驱动同步控制算法,从机构作用、控制方法两个角度保证系统输出同步,提高车辆直驶稳定性。
1 双电机耦合驱动系统机械同步特性分析
某双侧电机耦合驱动的传动装置简图[3]如图1所示。该传动装置由两个驱动电机及其减速排、耦合机构及两侧的变速排组成。耦合机构由若干行星排构成,行星排参数(行星排齿圈齿数与太阳轮齿数之比)为kd. 两侧电机输出转速相同时,车辆直线行驶;两侧电机输出转速不同时,车辆差速转向。并且,通过耦合机构再生转向功率可以传递至驱动装置高速侧输出端,提高车辆的转向性能[4]。
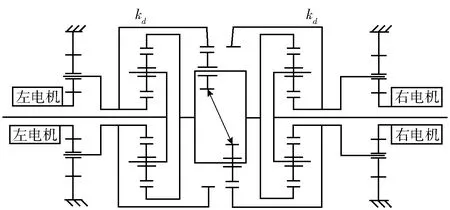
图1 双电机耦合驱动装置结构简图Fig.1 Structural sketch of dual motor coupling drive transmission
1.1 耦合机构负载均衡原理分析
耦合机构是一个双输入、双输出机构,根据行星传动运动学和动力学关系[5],其转速、转矩输入输出关系为
(1)
(2)
式中:nIL和nIR分别为耦合机构左、右侧输入转速;nOL和nOR分别为耦合机构左、右侧输出转速;TIL和TIR分别为耦合机构左、右侧输入转矩;TOL和TOR分别为耦合机构左、右侧输出转矩。
由(1)式、(2)式可知,一个电机的输入通过机械耦合作用影响另一侧的输出,两侧驱动电机输出端存在机械耦合。双电机耦合驱动系统与履带车辆之间的动力学模型为
(3)
式中:ic为侧传动比;G为车重;φ为路面附着系数;r为主动轮半径;TL和TR分别为左、右主动轮的阻力矩;JL和JR分别为等效至左、右主动轮后转动惯量;nL和nR分别为左右侧主动轮转速。
由(2)式和(3)式可知,车辆任一侧的路面干扰都不仅影响本侧回路的输出,也会通过耦合机构的作用影响另一回路的输出,即干扰互相耦合。假设在耦合机构输出端的左右侧加载转矩相差ΔTO,且右侧负载较大。令耦合机构输入端右侧和左侧负载转矩差为ΔTI. 由(2)式可得
(4)
(5)
由于kd的取值范围在1.5~4,ΔTI/ΔTO在0.4~0.2之间,均远小于1,这表明通过机械的耦合作用,各种不确定性扰动在系统输出侧形成的转矩差缩小,耦合机构起到了负载均衡作用,有利于系统输出同步。由于耦合机构的作用,使得电机负载差减小(降低了60%~80%),传递至电机的负载差大大减小,从机械功能上实现了负载的部分平衡,有利于车辆直驶稳定性的提高。
1.2 耦合驱动与独立驱动负载均衡特性对比
为了更深入地分析耦合机构的负载均衡作用,对采用双电机耦合驱动方案及双电机独立驱动方案的系统两侧输出端转矩及两侧电机转矩的关系进行对比。令kd=3,则ΔTI/ΔTO=0.25.
耦合驱动与独立驱动的输入输出转矩关系对比如图2所示,横坐标取系统输出端左侧转矩与右侧转矩比,纵坐标取单侧电机转矩与左右两侧电机输出转矩和的比值。从图2中可以看出:双电机独立驱动,因其每一侧的输入之间对应输出,之间没有机械耦合关系,所以无法实现降低负载差,系统每侧的输出与该侧电机的转矩是等比例关系;双电机耦合驱动系统每侧的输出都与两侧电机的转矩有交叉耦合关系,降低了两侧电机的负载差。

图3 双电机耦合驱动系统仿真模型Fig.3 Simulation model of dual motor coupling drive transmission
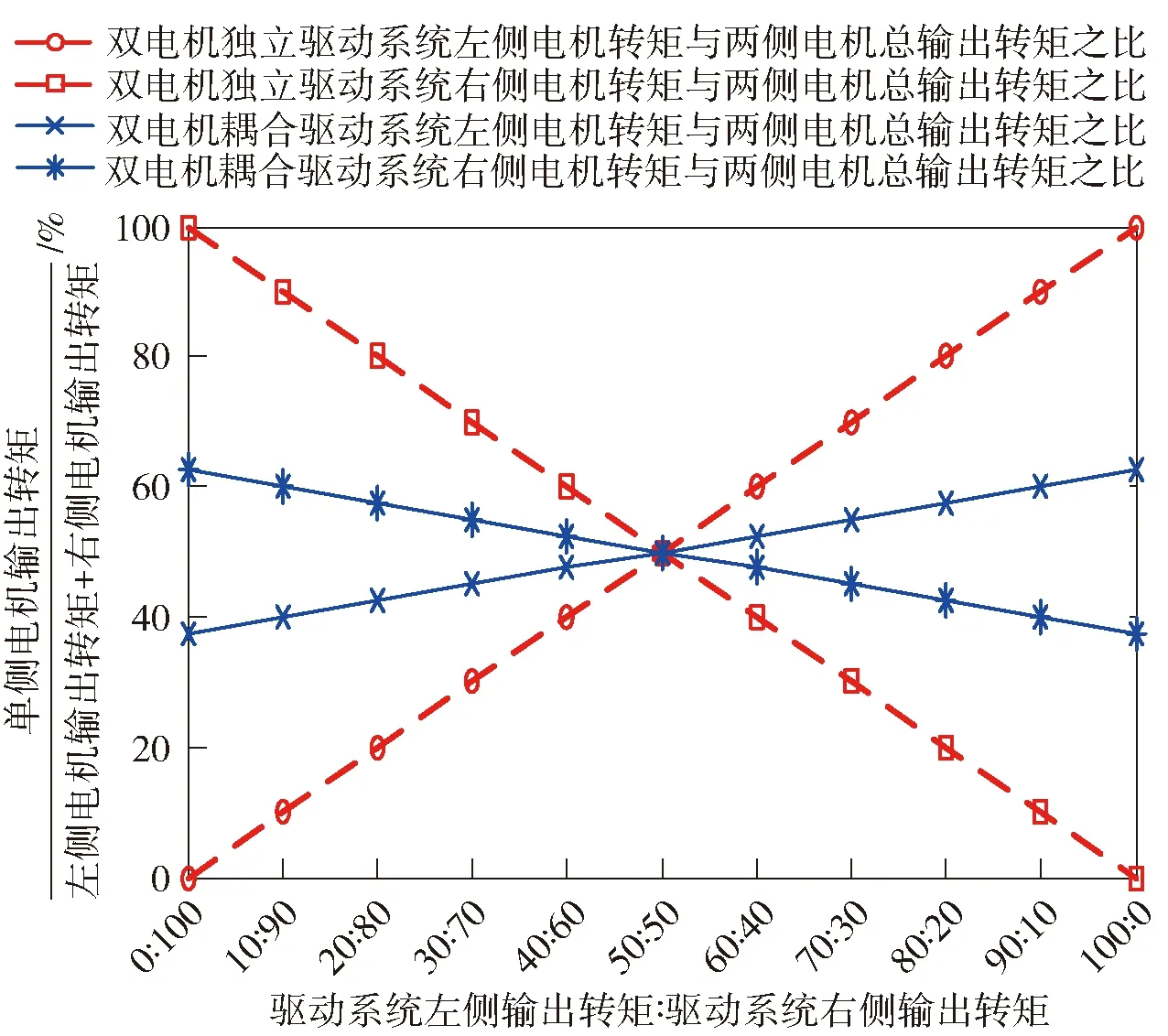
图2 双电机耦合驱动与独立驱动的输入输出转矩 关系对比Fig.2 Comparison of input and output torque relationship between coupled drive and independent drive
2 双电机耦合驱动系统同步运行影响因素
影响驱动系统同步运行的因素归结起来,主要有以下两类:一是电机控制中存在一定控制误差,误差会带来两侧电机转速输出的不同步,从而导致车辆跑偏;二是作用在两侧输出端的负载不同,因为通常情况下车辆两侧所处的路况都会存在一定差异,所以两侧电机输出端上的负载转矩必然不相同,两侧电机必然出现转速差。
利用数学分析软件MATLAB/Simulink建立双电机耦合驱动履带车辆仿真模型[6],进行各因素对双电机耦合驱动系统同步性能影响的仿真分析,如图3所示。
2.1 两侧电机控制误差影响分析
将电机控制特性的误差分为两类[7]:1)电机的稳态误差,主要是指电机的输出转矩误差,即要求的转矩输出与实际的输出转矩有恒定的差值;2)电机的动态误差,主要是电机的响应时间。
假设两侧履带张紧状态一致,分别分析水泥路面、沙石土路及荒草地路面条件下,两侧电机控制误差对车辆偏驶量的影响。仿真工况为,将车辆从0 km/h加速至30 km/h后,然后匀速行驶,车辆纵向位移总共为100 m. 如图4所示,车辆的偏驶量随两侧电机转矩偏差的增加而增大。如图5所示,车辆偏驶量随着两侧电机动态响应时间差的增加而增大,并且其余条件相同的情况下,路面越恶劣,车辆偏驶量越大。

图4 两侧电机转矩偏差与偏驶量关系曲线Fig.4 Relation curve between torque difference of two motors and vehicle offset distance

图5 两侧电机动态响应时间差异与偏驶量关系曲线Fig.5 Relation curve between torque dynamic response time constant difference of two motors and vehicle offset distance
2.2 两侧负载差异影响分析
从外部影响因素来看,由于两侧履带所处的实际路面具有一定随机性,两侧的地面阻力不可能完全一致[8],因此在两侧履带上形成的负载不均衡,从而导致等效到双电机耦合驱动系统两侧输出端的负载不相等。
假设两侧履带张紧状态一致,分别分析水泥路面、沙石土路及荒草地路面条件下,两侧履带负载差异对车辆偏驶量的影响。仿真工况为,将车辆从0 km/h加速至30 km/h后,匀速行驶,一侧履带阻力突增并持续5 s后变为原来的阻力值,车辆匀速行驶纵向位移达到100 m后仿真结束。
如图6所示,车辆偏驶量随两侧履带负载差异的增加而增大。并且其余条件相同的情况下,路面越恶劣,车辆偏驶量越大。

图6 两侧履带负载差异与偏驶量的关系Fig.6 Relation curve between the difference of track load on both sides and vehicle offset distance
3 双电机耦合驱动系统同步控制研究
虽然耦合机构可以将负载差降低60%~80%,但从上述对双电机耦合驱动同步运行的影响因素分析来看,电机转矩稳态误差、电机动态响应误差以及车辆行驶工况复杂多变造成的负载不均衡,仍会对车辆直线行驶性能造成影响。因此,在控制上需采取一定措施来保证驱动系统输出同步。目前存在的同步控制技术包括并行控制、主从控制、交叉耦合控制、虚拟总轴控制、偏差耦合控制[9-11],通过对5种方法进行比较,结合双电机耦合驱动的特点,采用偏差耦合控制策略,实现系统的同步控制。
3.1 基于模糊PID的偏差耦合同步控制策略设计
传统PID控制器原理简明,参数物理意义明确,具有良好的控制效果和鲁棒性,但无自适应能力。车辆行驶过程中两侧履带负载是时变的、随机的。显然参数固定的传统PID控制器是无法满足驱动系统同步控制要求的。模糊控制具有很强的自适应能力,可对复杂的非线性系统进行有效的控制。将PID控制与模糊控制结合起来,构成模糊PID复合控制,是改善系统静、动态性能的很好途径[12-14]。因此,本文采用模糊PID控制器进行双电机耦合驱动系统同步控制。


图7 双电机耦合驱动同步控制系统结构框图Fig.7 Block diagram of synchronous control system of dual motor coupling drive transmission
当车辆一侧履带负载受到扰动后,两侧电机之间的转速趋于相同越快越好,即应尽快消除转速偏差;当电动机之间的转速趋于相同时,要尽量避免发生超调[13-16]。因此,针对不同的电机转速偏差和转速偏差变化率,对PID控制器比例系数KP和积分系数KI的要求如下:
1)在转速偏差较大时,为了尽快地消除转速偏差,提高系统响应,同时避免出现超调,应使KP取大值,KI取值为0;而当转速偏差较小时,为了进一步减小转速偏差,并同时防止出现超调,产生振荡使稳定性变差,要将KP值减小,KI取值为小值;当转速偏差已经很小时,为进一步消除静差,并克服系统超调,保证转速尽快稳定,KP取值要继续减小,KI取值保持不变或稍微取大。
2)当转速偏差与转速偏差的变化率为同号时,说明该侧的电机转速与另外一侧电机的转速差越来越大。为了尽快消除转速偏差,保证两侧电机输出的快速同步,KP值应取最大;当转速偏差与偏差的变化率为异号时,KP值应随着偏差的减小逐渐减小。
3)偏差的变化率越大,则KP取值越小,KI取值越大,偏差的变化率越小则KP、KI的取值规律正好相反。但同时也要结合着转速偏差的大小来综合考虑。
根据上述PID参数的作用以及在不同的转速偏差及偏差变化下对PID参数的要求给出比例系数修正量、积分系数修正量模糊控制表。左侧和右侧电机的转矩调节PID控制器的比例系数修正量和积分系数修正量具有相同的模糊控制表,因此只列出左侧电机转矩调节PID控制器的比例系数修正量ΔKPL和积分系数修正量ΔKIL的模糊控制表,如表1、表2所示。表1和表2中,NB、NM、NS、Z、PS、PM、PB分别表示变量的模糊状态为负大、负中、负小、零、正小、正中、正大。
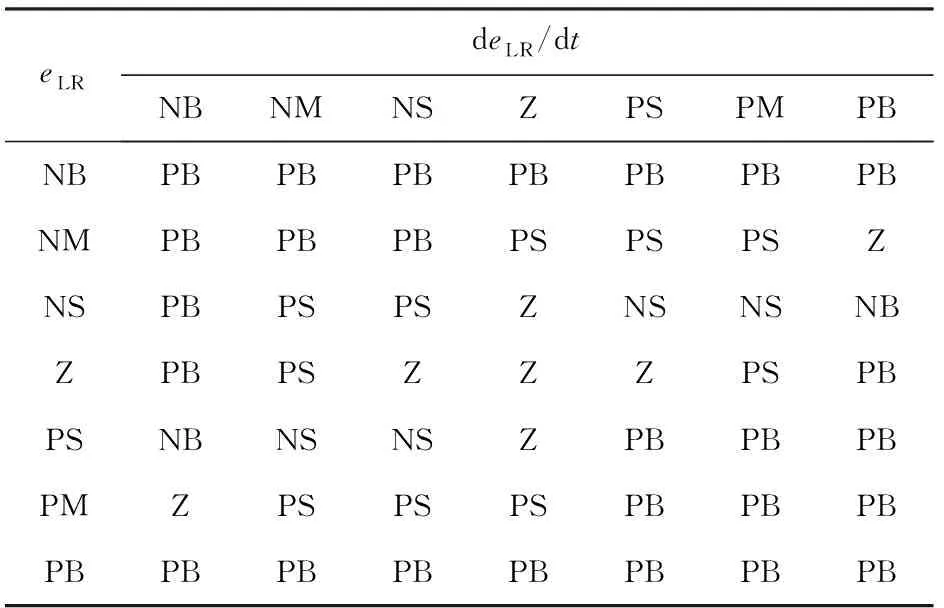
表1 比例系数修正量ΔKPL模糊控制表Tab.1 Fuzzy control table of proportional coefficientcorrection
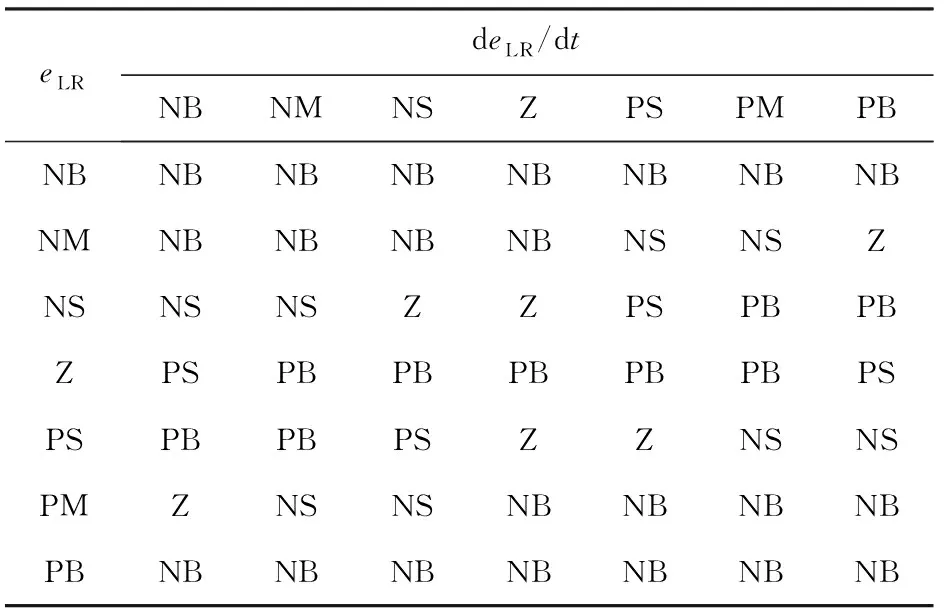
表2 积分系数修正量ΔKIL模糊控制表Tab.2 Fuzzy control table of integral coefficient correction
3.2 双电机耦合驱动系统直驶同步仿真分析
利用MATLAB/Simulink软件建立基于模糊PID的同步控制模型,对车辆直驶过程进行仿真。对两侧电机存在转矩稳态误差、动态响应误差、输出端存在不平衡负载状态下,进行有、无同步控制情况的对比仿真分析。
3.2.1 两侧电机控制误差存在差异状态下系统输出同步性仿真分析
在水泥路面上,先将车辆从0 km/h加速至30 km/h,然后车辆匀速行驶。两侧电机转矩偏差为5%,且左侧电机转矩大于右侧电机转矩,动态响应时间右侧电机比左侧电机大0.1 s,两侧主动轮负载相同。仿真结果如图8所示,当未采取同步控制时,左侧电机输出转矩大于右侧电机,两侧电机转速差达到180 r/min,车辆偏驶量在仿真结束时达到3.5 m. 采用同步控制后,通过对两侧电机转矩进行补偿,两侧电机输出转矩相同,两侧电机转速差控制在10 r/min之内,保证了系统输出同步,车辆偏驶量基本为0 m.
3.2.2 负载不平衡状态下系统输出同步性仿真分析
进行水泥路面上系统输出同步性仿真,仿真过程中施加在两侧主动轮上的不平衡负载如图9所示,其中,120~125 s、210~215 s在左侧主动轮上施加不平衡负载,80~90 s、160~165 s、230~233 s、240~245 s在右侧主动轮上施加不平衡负载,两侧电机控制特性相同。
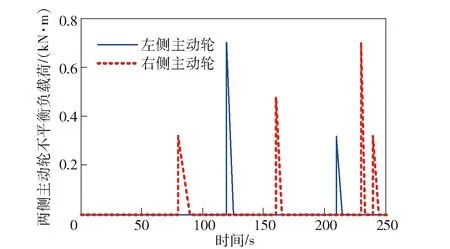
图9 两侧主动轮不平衡负载Fig.9 Sprocket wheel unbalanced load
仿真结果如图10所示,当未采取同步控制时,两侧电机输出转矩相同,但由于两侧负载不平衡,两侧电机转速差最大达到170 r/min,车辆偏驶量在仿真结束时达到7 m. 采用同步控制后,通过对两侧电机转矩进行补偿,使电机转速差控制在1 r/min之内,车辆偏驶量基本为0 m. 由于耦合机构的负载均衡作用,虽然两侧主动轮负载差最大在800 N·m左右,但是经过变速机构和耦合机构传递到电机输出端的负载差仅为12 N·m左右,若无耦合机构,那么电机输出端负载差为48 N·m左右。同时无同步控制的仿真结果也说明虽然耦合机构可以均衡负载,但是若不从控制策略方面对电机转矩进行补偿,也难以保证系统输出同步。
4 双电机耦合驱动系统同步性能试验验证
基于实车平台进行双电机耦合驱动系统同步性能试验,在水泥路面上,对无、有同步控制策略两种状态进行了对比试验,在试验过程中要求驾驶员不操纵方向盘,驾驶员控制油门踏板使车辆加速,当电机转速达到4 200 r/min左右时,开始逐渐减小油门开度,使车辆减速,通过总线记录仪对车辆通信网络数据进行采集保存。试验结果如图11和图12所示,当无同步控制时,两侧电机转矩控制指令相同,两侧电机转速差在-100~150 r/min范围内。加入同步控制策略后,控制器根据两侧电机转速差对两侧电机转矩进行补偿,补偿量在-6~6 N·m范围内,两侧电机转速差控制在-30~30 r/min范围内。通过耦合机构作用后,驱动系统两侧输出端转速差范围缩小至-2.4~2.4 r/min范围内,基本保持了系统输出同步,可以保证车辆直驶稳定性。
5 结论
本文分析了双电机耦合驱动系统机械同步特性,得出耦合机构可以使驱动系统两个输出端的负载差传递到其两个输入端后降低60%~80%. 通过分析双电机耦合驱动不同步的影响因素,设计了基于模糊PID的偏差耦合同步控制策略。通过对比仿真结果可以看出,相同工况下采用同步控制策略后,车辆偏驶量为0 m,验证了控制策略的有效性。通过对比试验结果可以看出,采用同步控制策略后,两侧驱动电机转速差减小为原转速差的24%,提高了驱动系统的同步性能。综上,利用机械作用和控制策略相结合的方法可以解决由于两侧电机控制误差及驱动系统输出端不均衡负载等因素导致的双电机耦合驱动系统同步问题。

图10 两侧负载不平衡情况下同步控制仿真结果Fig.10 Simulated results with and without synchronization control with difference between loads of two sprocket wheels
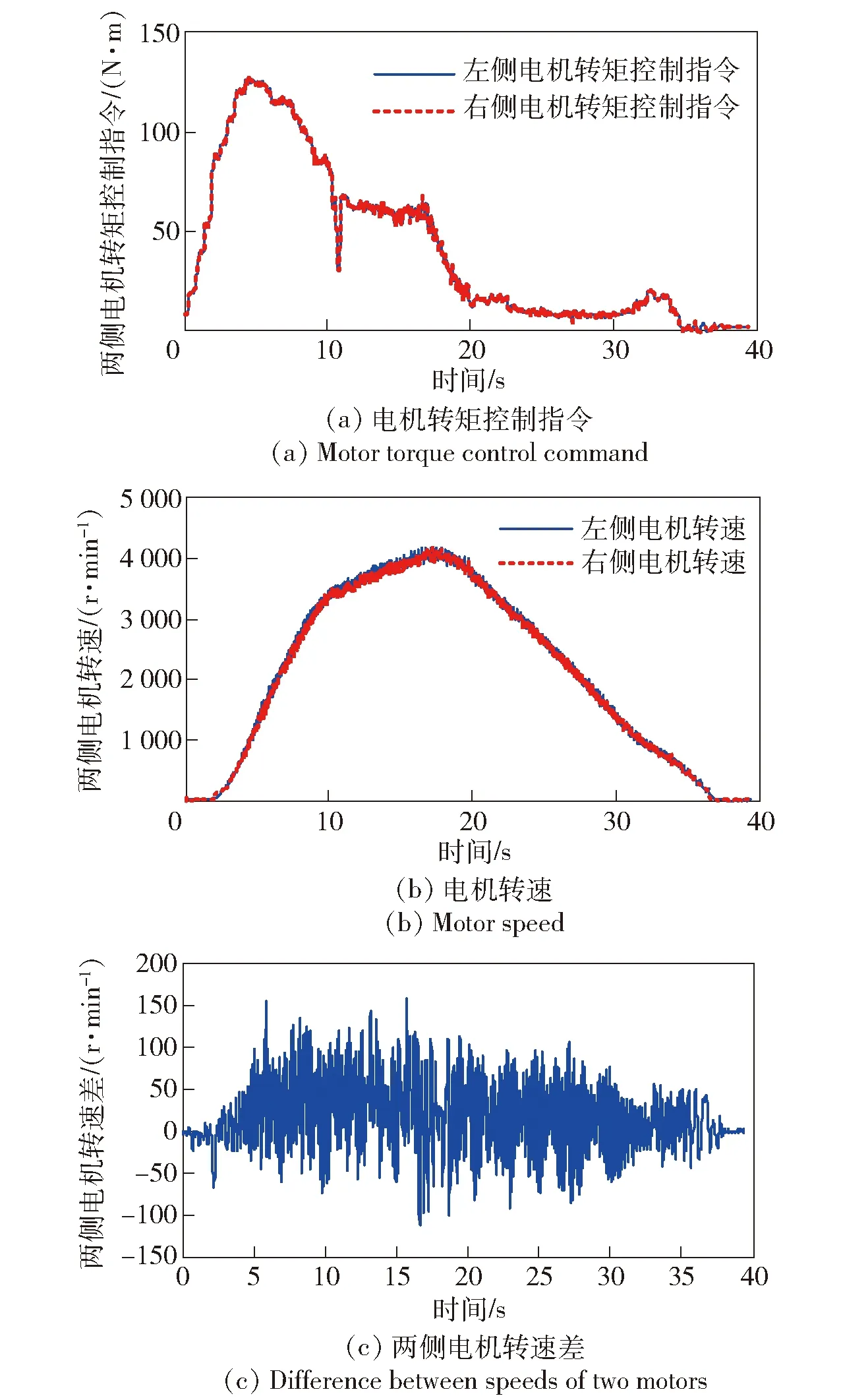
图11 无同步控制的试验结果Fig.11 Experimental result without synchronization control
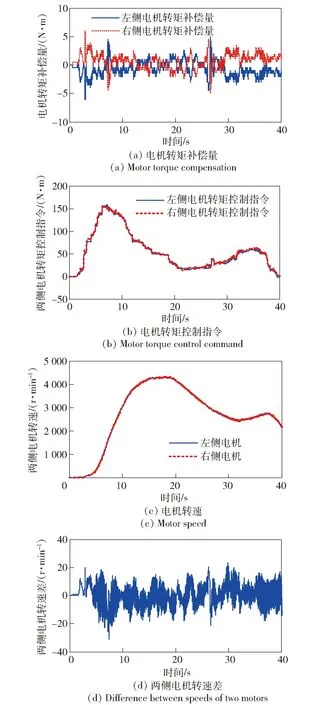
图12 有同步控制的试验结果Fig.12 Experimental result with synchronization control
