主动侧倾车辆设计与试验*
2020-12-08刘平义柯呈鹏高偌霖李海涛魏文军
刘平义,柯呈鹏,高偌霖,李海涛,魏文军,王 亚
(1.中国农业大学工学院,北京 100083; 2.河南坐骑科技有限公司,郑州 450000)
前言
21 世纪以来,我国城镇化进程不断加快,2019年,全国机动车保有量达3.4 亿辆,其中11 个城市汽车保有量超过300 万辆,北京、成都的汽车保有量更是超过500 万辆。 人口和机动车数量的增加,随之而来的是交通拥堵、停车困难等一系列问题。
一种解决这些问题的方法是使车辆变小,即长宽不及传统汽车的一半,且能耗低、污染物排放少。但其特点是质心高,转向稳定性成为一个问题[1]。简单静力学计算表明,通过引入适当的倾斜[2],转向即可稳定,因此这种新式窄型车辆关键点是引入主动侧倾。 自Neumann 在1945 年至1950 年提出开创性样机以来, 人们还进行了许多其他尝试。Mercedes-Benz 在 1997 年法兰福克车展展出的“F300 Life Jet”三轮倾斜概念车,它的特点是一个两轮前轴和一个单后轮,由一个拖臂悬挂连接到主体;利用液压机构,前悬挂的平行四边形机制允许车辆倾斜到30°,同时保持车轮平行于身体。
Hibbard 等[3]首先提出主动侧倾的2 种控制方法:STC(steer tilt control)[4-6],类似摩托车侧倾,采用反向转向原理[7-8]将车辆侧倾至最佳角度;DTC(direct tilt control)[4,9],采用侧倾机构直接将车辆侧倾至最佳角度。 Rajamani 分析了 STC 与 DTC 的技术难点,建立了4 自由度横向动力学模型[10],并进一步针对DTC 能力消耗大、侧倾与转向同步等问题提出了解决方案[4]。 此外,文献[11]~文献[17]中在车辆侧倾系统控制、安全与稳定等方面都有广泛的建模和控制研究。
本文中立足于机械本体研究,在此基础上提出一种DTC 侧倾机构,在车体上安装侧倾电机带动平衡杆转动,使车轮上下移动,在重力作用下实现侧倾,不仅能实现快速、稳定转弯,而且能反向控制轴距不变防止停车时侧倾,同时解决转弯稳定与停车稳定两大难题。 侧倾过程中,转向盘转角传感器和轮速传感器实时测量转向盘转角、车速,计算侧倾电机的瞬时调节量,并通过侧倾电机上侧倾角传感器的反馈,实现车辆行驶过程中的动态调节以保证车身稳定。
1 主动侧倾机构的设计方案与工作原理
主动侧倾机构采用独立悬架,转向盘处安装转向角传感器获取车辆行驶时转向盘转角信息。 后轮安装轮速传感器获取车速信息,根据已获得的转向盘转角和车速信息,计算车辆在保持稳定情况下,车辆所需的侧倾角度,在当前位置至转向点行驶过程中完成车辆侧倾工作。
1.1 主动侧倾机构设计方案
主动侧倾机构安装在正三轮车辆上,位于两后轮之间,主要包括:侧倾角传感器、侧倾电机、平衡杆、连杆、上拉杆、下拉杆、减振器,其结构简图如图1 所示。 下拉杆一端与车身转动连接,另一端连接车轮,车轮与下拉杆相对转动;减振器分别与上拉杆和下拉杆转动连接;由车身、上拉杆、减振器、下拉杆、车轮按以上方式连接形成一组车轮定位机构;平衡杆中点与侧倾电机在车身横垂面转动连接,两连杆长度相等,上端与上拉杆球铰链连接、下端与平衡杆两端球铰链连接;侧倾电机通过控制平衡杆的旋转实现车轮绕车身上转动中心旋转,实现侧倾功能。停车时,车轮静止不动,能够反向控制拉杆静止保证车辆的停车稳定。 在侧倾电机处布置侧倾角传感器,能够实时测量车身侧倾信息。
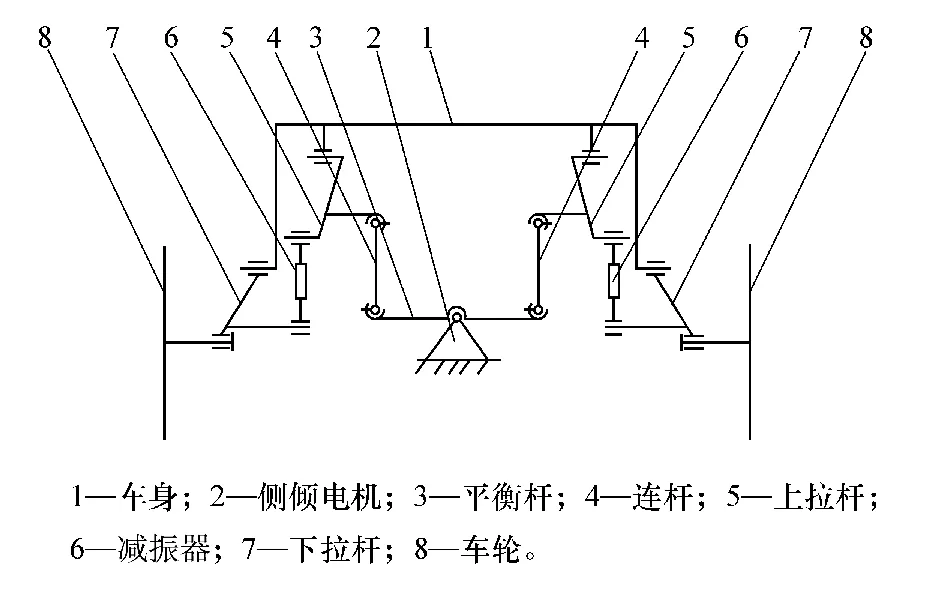
图1 主动侧倾机构结构简图
1.2 主动侧倾工作原理
图2 为主动侧倾车辆工作原理图。 停车时,车轮静止不动,上下拉杆保持静止,相连的连杆和平衡杆保持在稳定状态,实现停车稳定,状态如图2(a)所示。 当车辆向右转弯时,侧倾电机使平衡杆逆时针转动,通过左连杆带动左轮绕车身上连接点做逆时针圆周运动,通过右拉杆带动右轮绕车身上铰接点做顺时针圆周运动,状态如图2(b)所示。 当车辆向左转弯时,侧倾电机使平衡杆顺时针转动,通过右拉杆带动右轮绕车身上铰接点做逆时针圆周运动,通过左拉杆带动左轮绕车身上铰接点做顺时针圆周运动,状态如图2(c)所示。 在重力与驱动力的作用下,停车、右转、左转最终状态示意图如图3 所示。

图2 主动侧倾原理图

图3 最终状态图
1.3 控制系统设计
控制系统基于车身控制器,硬件主要包括转向盘转角传感器、轮速传感器、侧倾角传感器、侧倾电机等,控制系统结构如图4 所示。

图4 控制系统结构图
车身控制器为控制系统核心部件,主要负责通信、侧倾量计算、传感器集成等。 转向盘转角传感器和轮速传感器输出模拟量参数可通过I/O 口和车身控制器直接相连。
转向盘转角传感器、车速传感器实时测量转向盘转角、车速,并通过车身控制器计算所需侧倾角。最后通过侧倾电机完成主动侧倾,实现车辆转向稳定。 为消除侧倾误差,通过侧倾角传感器检测侧倾效果并作为反馈元件消除每个调整周期的误差,避免误差累积。
误差补偿步骤:位于侧倾电机处的侧倾角传感器实时监控每次侧倾结束后车身的侧倾角θ,根据控制器计算出的期望角度θdes,计算出期望角度与实际角度的差值△θ,作为补偿量带入下次侧倾中。
1.4 工作流程设计
主动侧倾系统工作流程如图5 所示。

图5 主动侧倾系统工作流程
2 主动侧倾角度分析计算
2.1 正三轮主动侧倾角度分析计算
以左转为例,此时车辆向左侧倾,车辆受力后视图如图6 所示。

图6 车辆主动侧倾受力示意图
设O点为车辆质心,受到重力G与离心力Fy的作用,O1、O2、O3分别为左后轮、右后轮、前轮与地面的接触点,建立力与力矩平衡方程:
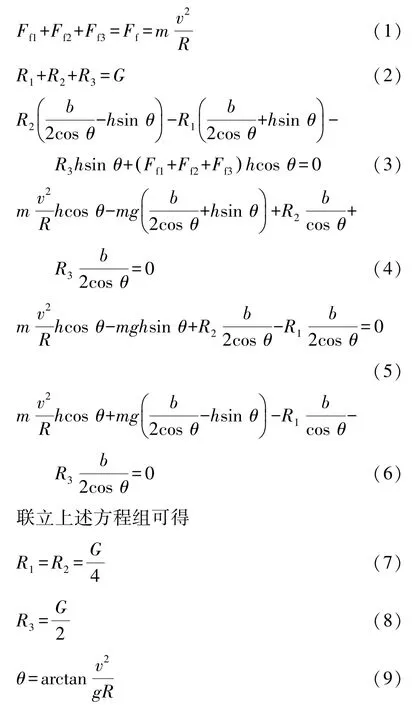
式中:G为车辆重力;Fy为车辆离心力;Ff1为左后轮摩擦力;Ff2为右后轮摩擦力;Ff3为前轮摩擦力;R1为左后轮支持力;R2为右后轮支持力;R3为前轮支持力;b为不侧倾时轮距;h为不侧倾时质心高度;θ为侧倾角度;R为转向半径;g为重力加速度;v为车速。
根据式(9),只要得知转向半径R与车速v,就可以计算出稳态情况下车辆的侧倾角度θ。
2.2 转向半径的计算
转向半径R无法利用传感器直接测量,通过几何分析建立转向盘转角β和转向半径R的关系。
主动侧倾车辆侧倾后的后视图与俯视图如图7和图8 所示,由于侧倾导致的轴距变化较小,故在计算中忽略不计,设轴距为a,正三轮质心距离后轮约为a/3,根据几何关系建立方程。

式中δ为前轮转向角。
联立式(9)和式(10)可得

图7 车辆主动侧倾后视图

图8 车辆主动侧倾俯视图

整理得

该方程无法求精确解,故采用泰勒展开的方法求近似解,根据泰勒公式有

将式(13)和式(14)代入式(12),5 次幂之后的项较小故忽略不计,整理得

转向盘转角与前轮转角的关系为

式中k为比例系数。
将式(16)代入式(15),得


其中轮距a、质心高度h和重力加速度g已知,若测得转向盘转角β与车速v,便可计算出最佳侧倾角θ。
3 试验
3.1 试验车辆参数
试制主动侧倾车辆,如图9 所示。

图9 车辆实物
试验样车机构参数:车辆尺寸为1.8 m×0.8 m×1.52 m(长×宽×高),车轮直径0.3 m,轴距1.53 m,轮距0.8 m。 车架后方安装一个功率为1 500 W 的侧倾电机,两个后轮由两个功率为800 W 的轮毂电机单独驱动。
转向盘转角传感器和侧倾角传感器均选择适应性强、价格便宜的角度传感器,如图10 所示。考虑到车辆侧倾角状态传感器作为反馈元件、测量精度要求较高,选择P3036-C-90-V1-L-5 中的 PandAuto 角度传感器,线性误差为0.3%,有效电气转角为360°,分辨率4 096位。 角度传感器可通过数据线和控制器相连,可实现与控制器通信,连续不断地将车身转向角、侧倾角信息传输到控制器中进行记录。

图10 角度传感器
3.2 试验验证
为验证主动侧倾方法的可行性及主动侧倾车辆的侧倾性能,选择室外道路,进行S 形轨迹与O 形轨迹的转向试验,所有试验均在2019 年12 月进行,试验地形如图11 所示。
主动侧倾的控制目标为将车辆侧倾至最佳角度,以实现重力分力与离心力的平衡,保证车身转向时稳定。 故选择测量转向过程中质心处横向加速度的大小来判断侧倾效果,由于主动侧倾与不侧倾横向加速度测量试验需分两次进行,两次试验无法做到转向盘转角β、速度v完全相同,不具有对比性,故根据主动侧倾试验的转向盘转角β与速度v信息,人为计算不侧倾时的横向加速度ay,并与主动侧倾时横向加速度测量值进行对比,计算公式如下:

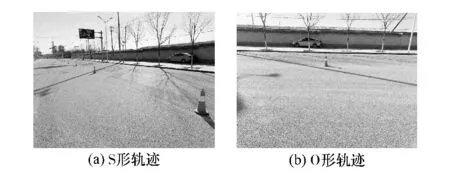
图11 试验地形
图12(a)为S 形车辆行走轨迹,车辆速度为10 km/h, 图12(b)为O 形车辆行走轨迹,车辆速度为15 km/h。 由图13 和图14 可得到转向盘转角随时间变化规律,并对比主动侧倾车辆“不侧倾时横向加速度”和“侧倾时横向加速度”两种情况的变化规律,检验主动侧倾效果。

图12 试验场景
由图13 可知,S 形轨迹试验中前轮转向角成波形变化,根据该转向角计算出不侧倾时横向加速度在±1g内变化,采用“主动侧倾技术”时横向加速度在±0.05g内波动,横向加速度减小了95%以上。 由图14 可知,O 形轨迹试验中前轮转向角基本固定不变,根据该转向角计算出的不侧倾时横向加速度在1.7g左右,采用“主动侧倾技术”时横向加速度在±0.1g内波动,横向加速度减小了94%以上,有效防止了车辆转向时由于离心力而产生的侧翻危险,验证了主动侧倾技术与侧倾机构的可行性以及理论分析计算的正确性。 主动侧倾试验数据的波动主要来源于减振器振荡的影响与车身的制造误差。

图13 S 型轨迹
4 结论
(1)本文中设计了一种采用新型DTC 侧倾机构的主动侧倾车辆,分析计算了车辆转向保持稳定时车身的最佳侧倾角。 分析计算表明可通过实时监测转向盘转角以及车速实现转向时车身的稳定。
(2)车辆在S 形轨迹与O 形轨迹道路试验转向过程中,可完成主动侧倾功能,并且可将转向时侧向加速度减少94%~95%左右,有效防止了车辆转向时由于离心力而产生的侧翻危险,验证了主动侧倾技术与侧倾机构的可行性以及理论分析计算的正确性,为城市窄型车辆的推广和应用提供了理论依据和试验参考。