一种行星轮系欠约束驱动装置设计计算
2020-12-07胡建波谭庆信义兵彭建华李海军唐茂华
胡建波 谭庆 信义兵 彭建华 李海军 唐茂华
1、湖南国防工业职业技术学院 2、武汉高德红外股份有限公司
某空间抓捕机构是用于抓捕空间故障卫星的执行装置,其捕获爪有3 个,为可靠抓取姿态微偏目标,三个捕获爪需要独立的驱动装置。减少驱动装置数量,这对质量和可靠性非常敏感的空间飞行体来说意义重大。为此,提出了使用一个驱动装置,采用合适的传递机构,将该输出转换为相对独立的三个输出的需求。
现有的欠约束驱动机构有连杆欠驱动手爪、万向节型欠驱动柔性臂等[1-5]。这些机构能较好地完成小角度范围内的姿态自适应,但不能连续转动以实现自适应。为此,本文提出了一种基于行星轮系传动特性的欠约束驱动装置。
1 工作原理
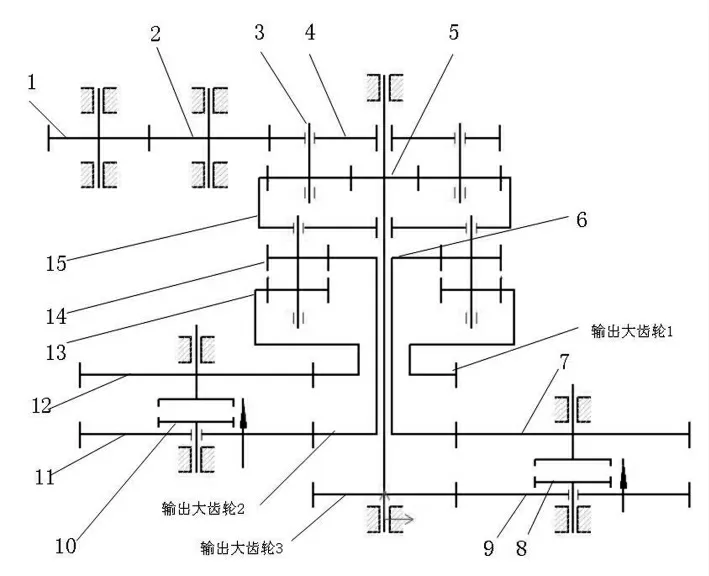
图1 欠驱动装置原理图
采用行星减速器以既可沿中心公转,又可以沿自身安装轴旋转的行星轮为输入条件时,可以实现中心太阳轮和外周内齿圈自由度不确定的原理,设计了两级行星轮变速机构,实现一个输入条件下,产生三个相对独立的输出。采用在三个输出齿轮的外侧啮合两组依靠电磁铁驱动的离合器的方案,实现对三个输出齿轮同步转动和相对独立转动的切换。
2 特定工况传动比计算
(1)仅输出大齿轮1 输出,输出大齿轮2、3 锁定时输出大齿轮1 的转速计算:若输入齿轮的转速为n1,则初动大齿轮的转速:
输出大齿轮2、输出大齿轮3 对应的抱合机构完成锁紧动作后,输出大齿2、输出大齿轮3 处于如下图所示的锁定状态,此时一级外齿轮的转速为:

则,输出大齿轮1 和二级外齿轮的转速为:

(2)仅输出大齿轮2 输出,输出大齿轮1、3 锁定时输出大齿轮1 的转速计算
若输入齿轮的转速为n_1,则初动大齿轮的转速
输出大齿轮2、输出大齿轮3 对应的抱合机构完成锁紧动作后,输出大齿轮2、输出大齿轮3 处于锁定状态,此时一级外齿轮的转速为:

则,输出大齿轮1 和二级太阳的转速为:

(3)仅输出大齿轮3 输出,输出大齿轮1、2 锁定时输出大齿轮1 的转速计算
若输入齿轮的转速为n1,则初动大齿轮的转速
输出大齿轮1、输出大齿轮2 对应的抱合机构完成锁紧动作后,输出大齿轮1、输出大齿轮2 处于如下图所示的锁定状态,此时一级太阳轮和输出大齿轮3 的转速为:

(4)输出大齿轮1、2、3 同步转动时驱动装置输出转速:
若输入齿轮的转速为n_1,当离合器1、2 的离合拨杆均将离合器的两个啮合齿轮啮合后,驱动装置简化为下图所示的结构,输出大齿轮1、2、3 具有相同的输出转速:
综上所述,欠驱动装置所具有的四种确定的输出方式的传动比如下表,显然,neve<n3max<n1max<n2max。
3 仿真分析
为了模拟出欠驱动机构的所有特性,仿真共设置了7 种工况,工况清单如下表:
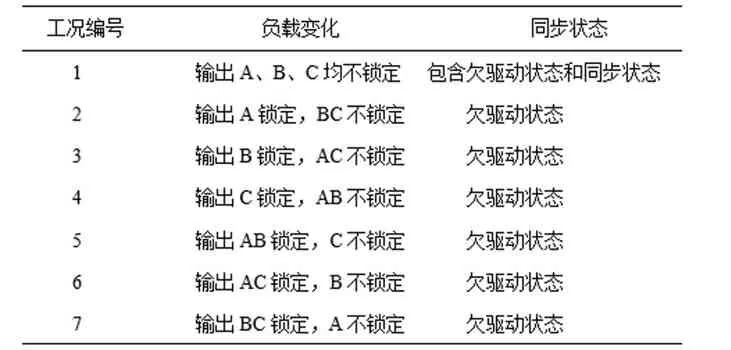
表2 工况清单
电机位置转速输入和同步离合器位置输入特性如下图。在0- 1S,电机运转一定时间,消除建模时齿轮配合的干涉与间隙,使机构正常顺畅运转,此时欠驱动机构为输出同步状态。2- 3S时,同步离合器由同步状态切换为欠驱动状态,同步离合器行程为17mm。3- 10S,电机驱动欠驱动机构以欠驱动状态旋转,并在10S 时停止。10- 11S 时,同步离合器由欠驱动状态切换为同步状态。11- 15S,电机驱动欠驱动机构以同步状态旋转。为方便衡量,电机在稳定运转时转速统一为100 转/ 分。
在工况2- 工况7 中,由于有输出锁定,不能运行在同步状态,故只仿前10S 的输入数据。且输出锁定在1S 时间点时行。
根据仿真结果,欠驱动机构可以实现预定的功能。其详细曲线分析如下:
工况1:输出A、B、C 均不锁定
输出A、B、C 均不锁定工况下主要考察欠驱动机构在同步和非同步状态下的输出特性,以及同步离合器插销阻力和运动特性。
工况1 下3- 10S,由于离合器为欠驱动状态,输出因为摩擦阻力等的不同转速也出现了差异。10- 11S 时,由于离合器切换为同步,转速有一定来回跳动。11- 15S 时,由于离合器为同步状态,输出A、B、C 转速一致。
工况2 下,输出A 锁定,输出B、C 为欠驱动状态。可见输出A 锁定后,输出B、C 转速比较接近但有一定差别。输出B、C 转速为1500°/S(约250 转/ 分)。
工况3 下,输出B 锁定,输出A、C 为欠驱动状态。可见输出转速A 高于转速C,且A、C 两处均可进行输出。电机稳定后输出A 的转速约为215.3 转/ 分,并持续上升至240.5 转/ 分。电机稳定后输出C 的转速约为150.3 转/ 分,并持续下降至106.9 转/分。
工况4 下,输出C 锁定,输出A、B 为欠驱动状态。可见输出转速A 高于转速B,且A、B 两处均可进行输出。电机稳定后输出A 的转速约为206.5 转/ 分,并持续上升至232.6 转/ 分。电机稳定后输出B 的转速约为140.1 转/ 分,并持续下降至104.9 转/分。
工况5 下,输出A、B 锁定,仅有C 输出。可见输出A、B 锁定后,输出C 处可正常输出。电机转速稳定时,输出C 的转速约为530 转/ 分。
工况6 下,输出A、C 锁定,仅有B 输出。可见输出A、C 锁定后,输出B 处可正常输出。电机转速稳定时,输出B 的转速约为458.3 转/ 分。
工况7 下,输出B、C 锁定,仅有A 输出。可见输出B、C 锁定后,输出A 处可正常输出。电机转速稳定时,输出B 的转速约为301.6 转/ 分。
4 结语
笔者在前人研究的基础上,提出了以一种两级行星轮系为基础的三输出欠约束驱动装置,对4 种机构运动确定的情况下出入输出的传动比进行了理论推导和计算,并对7 种不同工况载荷下欠约束装置的机构运动情况进行了仿真分析,计算和仿真结果表明,本文设计的欠约束机构能满足功能,具备进一步工程化的条件。
