单镜头无人机在农房测量中的应用及精度验证
2020-12-05张艳明杨永崇郭岚王益展
张艳明,杨永崇,郭岚,王益展
(西安科技大学 测绘科学与技术学院,西安 710000)
0 引言
传统大比例(1∶500、1∶1 000、1∶2 000)地形图测量主要采用全野外测绘的方法,采集要素多、精度高,资金和时间消耗大。近年来,随着倾斜摄影测量技术的发展,无人机倾斜摄影已基本取代传统人工全野外测绘,成为小区域大比例尺测图的主流方式。但传统倾斜摄影测量一直没有突破5 cm点位中误差要求,这就限制了无人机在高精度地籍测量项目中的应用,特别是对于广泛使用的单镜头无人机,更是限制了其发展。
集体土地(含宅基地)使用权及农房所有权不动产调查测绘(简称农房测量)是当前测绘技术应用最广泛的领域之一。传统农房测量一般采用全野外测绘技术的测量方式,采用全站仪+GPS+钢尺相结合的方法[1]。此方法虽然精度高,但具有一定的局限性,作业效率低、成本高、作业时间长[2]。因此,倾斜摄影技术广泛应用于农房测量之中。对于高精度农房的测量,也已出现不少满足规范要求的五镜头无人机的研究,但是对于大多数企业来说,无法承担五镜头的高额费用。
1 无人机倾斜摄影测量的理论分析
无人机倾斜摄影的飞行高度是航线设计的基础。航摄高度需要根据地面分辨率,然后结合倾斜相机的性能,其表达如式(1)所示。
H=f×GSD/α
(1)
式中:H为航摄高度,单位为m;f为镜头焦距,单位为mm;α为像元尺寸,单位为mm;GSD为地面分辨率,单位为m[3-4]。对于本次实验,使用的无人机为大疆精灵4。无人机焦距为2.8 mm。农房测量所需要的地面分辨率为5 cm,像元尺寸为0.002 4 mm。通过计算可知,航高为58.3 m。结合实验区域实地情况,本次实验航高设置为60 m。
无人机倾斜摄影规范规定,航向重叠度一般应为60%~80%,最小不小于 53%;旁向重叠度一般应为15%~60%,最小不小于8%。在无人机倾斜摄影时,旁向重叠度是明显不够的[4-6]。研究相关结论可知,对于一个点,不同角度的拍摄照片越多其精度越高。本次实验通过理论分析再考虑单镜头的效果,航向与旁向重叠度都设置为80%。
控制测量是为了保证空三的精度、确定地物目标在空间中的绝对位置[4],因此,像控点的布设是至关重要的。在大比例尺项目的生产过程中,五镜头无人机本身自带高精度POS系统辅助,可适当减少控制点的数量, 按照1.5 km间距布设控制点[7]。相反,单镜头无人机的POS数据精度较低。因此,为提高实验数据的精度,每平方千米布设20个左右的像控点和检查点。像控点如果布设太密集,可能会耗时耗力;相反布设太稀疏,会影响其精度。倾斜摄影技术相对于传统摄影技术在影像重叠度上要求更高。无人机通常采用 GPS 定位模式,自身带有 POS 数据,对确定影像间的相对位置作用明显,可以提高空三计算的准确度[4]。
因此,结合相关原理,分析计算得出要满足农房测量5 cm精度,则必须满足以下有关参数。无人机参数设置如表1所示。
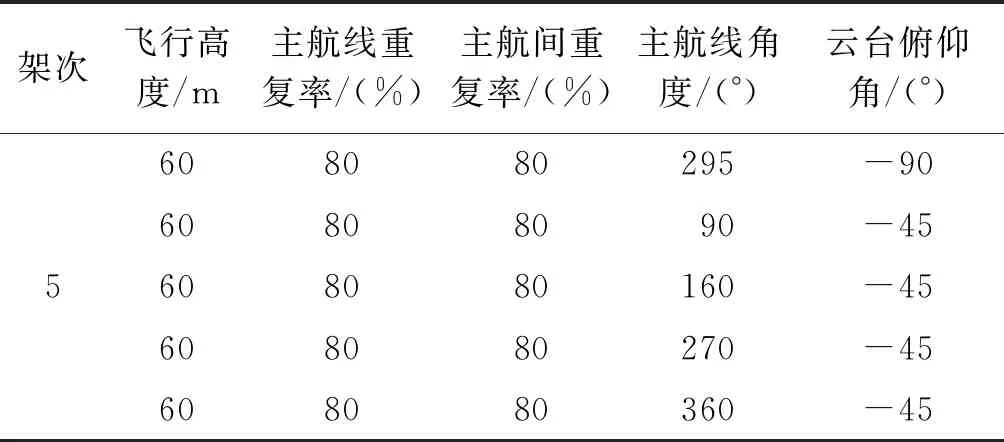
表1 无人机摄影参数
2 实验验证
2.1 全野外数据采集
本次实验主要在兰州市皋兰县砂岗村进行。该地区地势平坦、无复杂地形,建筑物分布均匀、植被较少,多数为单层房屋,适合实验的进行。实验时间为上午10点到下午3点。无人机飞行速度为20 m/s,续航时间为28 min。天气晴朗无云,有微风可能会造成精度的降低。
由于像控点的布设位置以及像控点的精度对模型的精度起着至关重要的作用,因此,在布设像控点时,依据整个航线区域来选择布设。采用格网布设方法。首先,整个区域的四角必须布设像控点,保证周边的重叠度;其次,在内部布设时,应尽量选择地势平坦且无周围无明显遮挡物的地区均匀布设,像控点的点位标志必须清晰明了。出于对本次实验的检查点布设,因此,检查点选择一些房屋的角点以及一些墙角点。结合实际区域布设像控点13个,检查点28个,分布情况如图1所示。

图1 所布设像控点位置
2.2 数据采集
通过对相片进行预处理,对获取的倾斜影像数据利用Smart3DCapture软件进行三维建模[8-10],进行空三加密计算,最后形成高精度的三维模型(图2)。

图2 三维模型示意图
最终计算的空三加密精为:Mxy=0.054 m,Mz=0.014 m,满足《中华人民共和国国家标准1∶500、1∶ 1 000、1∶2 000地形图航空摄影测量内业规范(GB/T 7930—2008) 》的要求[11-12]。对于空三加密,像控点测量的精度起到很大的作用。像控点是加密测量的基础和定向的依据,高精度的像控点能有效控制加密点的误差累计和传输[13]。因此,外业人员在选择像控点的时候必须选择清晰、明显的位置,内业人员在进行刺点的过程中,认真细心,充分利用框标对像控点进行准确的定位以便减少误差的累计。
将建立的三维模型导入EPS中,分别通过不同的人进行农房的裸眼采集,得到二维平面图(图3)。

图3 二维平面图
经过多人采集分析精度得知,在EPS采集过程中应注意以下几点。
1)采集时模型墙面有变形、凹凸,采集点不同导致误差,或采集点分别在墙面和窗户上导致误差(此房屋窗户与墙面属于同一平面,但精确的坐标有误差)。应将模型旋转到相对清晰的角度,寻找相对变形不严重、平滑的地方进行采集。
2)由于房檐有一定的高度,采集点在房檐上檐和下檐导致高程误差较大。作业开始之前应确定好此类房屋的高程定点标准,按统一标准进行数据采集。
3)砖房高程误差产生原因为砖房顶是有坡度的房顶,每排瓦片高程不同,采集点稍微有偏差就导致高程误差。此类房屋多为五点房方法进行绘制,X坐标取决于第一个采集点和第二个采集点,采集点取在房顶和侧墙就会差一个砖块厚度,从而导致偏差。应该对砖房进行实物观察,确定一个采集点,以保证以后作业的精确度。
因此,在EPS采集过程中必须仔细研究模型,以便满足精度要求。
2.3 精度分析
为了保证农房的精度要求,本实验选取了28个检测点作精度对比。通过对无人机倾斜摄影测量采集后的坐标与实地采集的坐标进行差值计算,分别得到X与Y的限差如表2所示。
通过分析,有1个超限不满足精度要求,故对其余检查点进行分析,并绘制出直方图与正态分布曲线图(图4、图5)。

表2 误差统计表

图4 X轴误差分布图
通过分析图4和图5可知,X轴方向的误差范围为-8~10 cm之间,Y轴方向的误差范围为-8~8 cm之间,充分体现偶然误差的规律。X轴方向的误差主要分布在-6~6 cm之间,总共占有24个检查点,占总数的88.89%;而误差分布在-8~-6 cm、6~10 cm之间的共3个检查点,占总数的11.11%。Y轴方向的误差主要分布在-4~6 cm之间,总共占有25个检查点,占总数的92.6%;而误差分布在-6~-4 cm、6~8 cm之间的共2个检查点,占总数的7.4%。这充分体现了误差具有集中性的体征。而且X、Y轴的误差分布均符合偶然误差的分布规律[14],满足要求。因此,这27个检查点满足要求,可进行更深层次的研究。

图5 Y轴误差分布图
对各个界址点进行点位高精度及等精度中误差计算可知,房屋界址点的中误差为4.12 cm,小于中误差5 cm[15],故满足国家规范所要求的精度。因此,单镜头无人机可应用于小范围高精度的农房测量实践中。
3 结束语
本文主要通过尝试单镜头无人机模拟五镜头进行农房测量实验,以砂岗村为例,通过理论分析研究无人机在农房测量中的技术应用、规范流程设计方案,经过实验验证得出,单镜头无人机可以满足农房测量的精度要求,符合国家规范标准,也极大提高了工作效率、节省了大量人力、物力等资源。这为单镜头无人机在农房测量中的使用提供了一个技术参考。具体结论如下。
1)单镜头无人机在飞行高度为60 m,旁向重叠度和航向重叠度设置为80%、80%,则可满足农房测量的规范要求。
2)通过对理论的分析可知,在农房测量中,无人机的高度、重叠度的设置以及像控点的布设严格按照相关理论设置,并结合实际情况分析处理,这对无人机倾斜摄影测量技术有着关键作用。
3)通过对数据以及进行精度分析可知,界址点中误差为4.12 cm,小于中误差5 cm,满足国家规范精度要求。
4)单镜头无人机在农房测量中具有成本低、数据量小以及处理简单等优势,在小范围测量区域可以推广使用。相比较大规模、大面积测量区域,单镜头无人机耗时较长、精度较低,不建议采用。因此,本文为小范围区域的农房测量提供技术参考。
