基于高速自然驾驶数据的驾驶员跟车特性
2020-12-04孙宏图刘兴亮黄昆
孙宏图,刘兴亮,黄昆
1.天津工业大学 机械工程学院,天津 300387;2.中国汽车技术研究中心有限公司,天津 300300
0 引言
跟车是驾驶行为中最常见的一种跟驰状态,跟车的速度、加速度和位置等实时受到前方车辆的影响[1-4]。驾驶员的跟车行为特性严重影响行车中的交通安全[5-9]。
Kathy等[10]利用驾驶模拟器开展能见度对跟车行为的影响研究,对雾天以及能见度较低时的跟车行为进行分析;Amanda等[11]在驾驶模拟试验中分析驾驶经验对跟车行为的影响,发现驾龄短的驾驶员比驾龄长的驾驶员感知时间和反应时间长;文献[12-13]通过驾驶员眼睛的状态判断其疲劳度,并利用模糊隶属度函数实时修正高速公路跟车时的安全车距模型;文献[14-15]通过实际数据聚类分析的方法,将具有跟车行为的驾驶员分为5类,并在Matlab仿真中验证该方法的有效性;袁伟等[16]通过高速自然驾驶数据对跟车间距及跟车行为进行分析,并利用仿真进行验证,但没有考虑跟车过程中的加速度特性。目前对驾驶员跟车特性的研究绝大部分停留在仿真验证层面,没有综合考虑在实际驾驶环境中驾驶员的跟车特性,缺乏自然驾驶数据作为仿真建模的依据,基于自然驾驶数据的驾驶员跟车特性还存在许多问题亟待研究[17-21]。
随着车辆网络技术及控制技术的不断提高,通过智能化手段提高车辆的舒适度、安全性和节能性是目前汽车领域的重点研究方向之一。自适应巡航系统(adaptive cruise control,ACC)在定速巡航的基础上,进一步考虑驾驶员的舒适性和安全性,能有效缓解驾驶疲劳,具有广阔的发展前景,如何合理决策车速与安全跟车距离、驾驶员跟车行为以及加速度特性是ACC算法开发的核心。本文以驾驶员在高速公路上的自然驾驶数据为基础,通过Matlab/Simulink联合CANape软件对驾驶数据进行跟车场景的判定与筛选,研究驾驶员在加减速以及稳速跟车阶段的跟车特性,最大限度满足驾驶员在实际驾驶环境中的舒适性与稳定性,以期为ACC及驾驶员跟车仿真研究提供参考依据。
1 跟车判定程序设计
1.1 试验设计
选择2019-03-10—05-20进行道路试验,测试有效时间为58 d。道路测试里程为10 220.49 km。测试天气有晴天、阴天、雨天、雾霾天等。测试地点涵盖天津、重庆、常州及周边地区。道路类型包括高速公路、城市道路、城市快速路、乡村道路、山区道路等,其中高速、国道、市区、乡村道路的比例约为5:2:2:1。测试场景包括直道、弯道、十字路口、红绿灯、人行横道、桥梁、隧道等以及2种或2种以上的组合场景。
测试过程中随机抽取驾驶员100名,主要按照性别、年龄等要素进行分类,其中男女驾驶员的比例约为1:1,年龄为25~55岁。
试验车(自车)中采集数据的传感器主要包括Mobileye摄像头、激光雷达和ESRmm波雷达,其实物如图1所示。由于本次试验主要进行驾驶员跟车特性的研究,故将3种传感器安装在试验车的前部,其安装位置如图2所示。

a)Mobileye摄像头 b)ESR毫米波雷达 c)激光雷达 图1 试验用传感器 图2 传感器安装位置示意图
1.2 跟车判定程序设计
实车试验阶段采集的自然驾驶数据并非全部属于跟车阶段,需要对试验数据进行筛选,提取符合跟车场景的数据。本次跟车判定系统利用动态要素对跟车场景进行挖掘,动态要素主要包括两车相对速度及纵向距离、自车速度、两车侧向距离、跟车时距和即时碰撞时间(自车会撞上前车的时间)等。
基于Matlab/Simulink仿真平台对跟车动态要素进行限定,跟车判定动态要素程序如图3所示。限定跟车动态要素后,将判定程序嵌入具有数据采集及传感器数据读取功能的CANape软件中,以实现对跟车场景进行判定、挖掘及数据提取的目的。该跟车判定程序中符合动态要素的目标车辆可能有2个甚至多个,通过最小跟车间距判定唯一的跟车目标,从而得到跟车过程中的跟车参数。
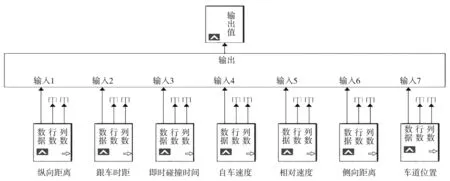
图3 跟车判定程序
2 跟车数据筛选
根据图3,结合文献[22-24],本次数据筛选过程中给定的跟车动态参数如表1所示(数据为筛选前的参数范围,为跟车场景必备条件),传感器最多能够同时检测到64个目标物,经过筛选后仅留下1个目标车辆。

表1 跟车动态参数
确定目标车辆后,便可以确定在跟车过程中唯一的目标车辆序数、跟车间距L以及相对速度vr。在CANape软件中提取的跟车场景如图4所示,图4为2019-04-03T18:00任意选择的某段高速驾驶数据,其输出参数主要包括:目标车辆序数、自车加速度a及v、L、vr。
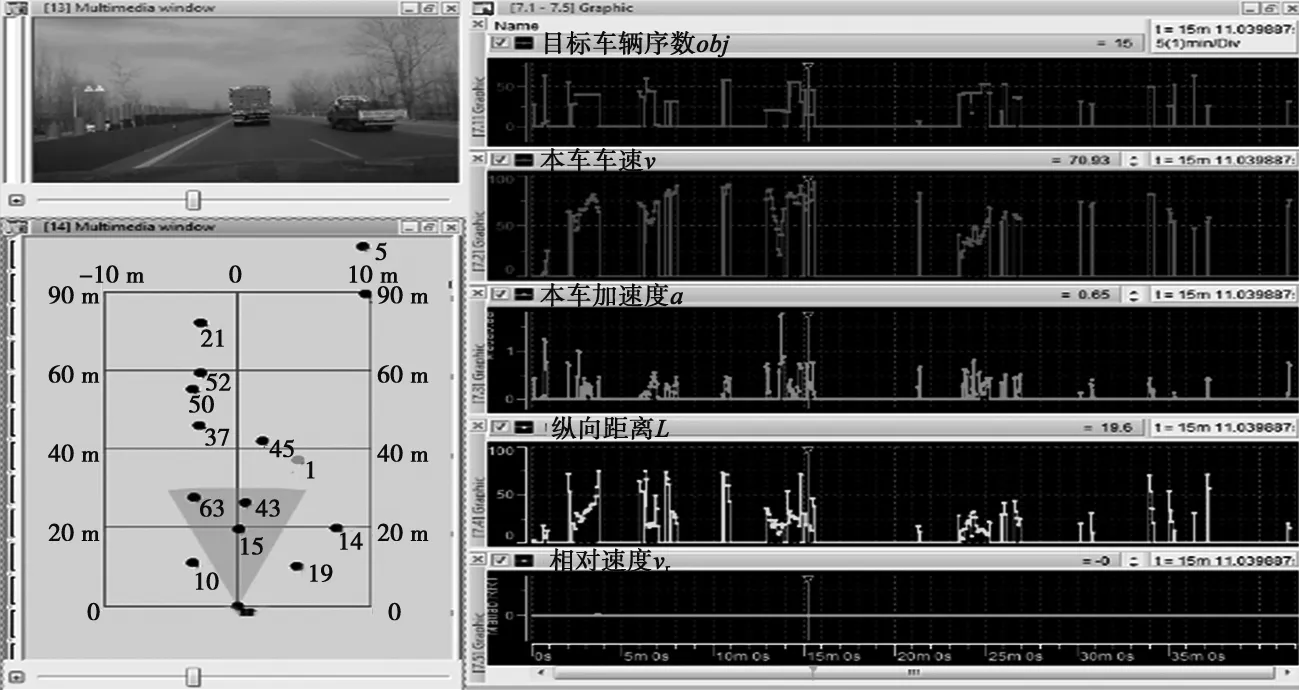
图4 CANape中的跟车场景
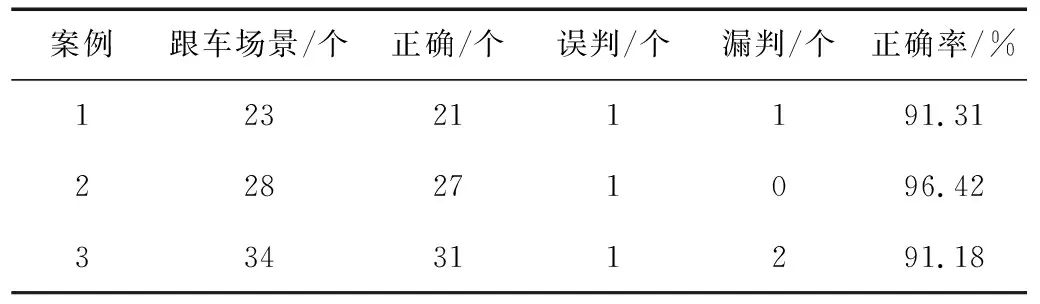
表2 场景识别系统对跟车场景数据的识别
随机选取3段高速公路驾驶数据,通过Matlab/Simulink联合CANape软件对数据进行跟车判定与筛选,结果如表2所示。由表2可知:设计的场景识别系统对截取的跟车场景数据的正确识别率达90%以上,基本不存在漏报及误报问题。
从驾驶员的角度将跟车状态分为非稳定跟车和稳定跟车状态。稳定跟车状态是指在跟车过程中两车的相对速度、跟车间距以及侧向距离没有大范围的波动,即驾驶员在跟车过程中没有超车、变道等,当跟车时间超过10 s时,认定为1个稳定跟车时段。非稳定跟车状态是指驾驶员的跟车时间较短,或者在跟车过程中出现超车、变道以及突然加减速等行为。
本文主要对驾驶员在高速公路上的稳定跟车特性进行研究,利用图3和表1,在CANape软件中以15 s为1个时间周期,截取76段高速跟车场景,共11 335个数据点。
3 跟车特性分析
3.1 跟车间距
通过对11 335个数据点进行统计分析,发现自车车速稳定在60~110 km/h,统计跟车间距如图5所示。从图5可以看出:70%以上的跟车间距为20~80 m,平均跟车间距为63.6 m。为了分析驾驶员在不同车速下的跟车距离,将76个跟车场景的车速以每10 km/h为一个梯度进行划分,经计算统计跟车间距如表3所示,其中Lj为跟车间距均值,Lb为跟车间距标准差。

图5 跟车间距统计

表3 跟车间距分布
为便于研究驾驶员在跟车过程中v与L的关系,将不同v下的Lmax、Lmin、Lj作3次拟合(经过3次拟合时,拟合效果最理想),Lmax、Lmin、Lj与后车车速的拟合关系分别为:

图6 跟车过程中L与v的拟合曲线
Lmax=0.000 652 8v3-0.160 60v2+12.890v-316.9,
Lmin=0.000 172 2v3-0.086 89v2+9.097v-344.9,
Lj=0.000 758 3v3-0.174 90v2+13.710v-319.2。
Lmax、Lmin、Lj与v的拟合曲线如图6所示。
从表3、图6中可以看出:当v增大时,L呈现上升趋势,说明驾驶员为了行车安全,在v增加时,通过增大L来保证足够的安全距离。随着v的增加,Lb呈递增趋势,表明L波动程度较大,跟车状态不稳定。
3.2 驾驶员跟车行为分析
3.2.1 稳速跟车阶段

图7 稳速跟车vr与L的关系曲线
稳速跟车(前后两车的相对速度为-0.5 ~0.5 m/s)过程中,前后车之间的相对位置处于一个小的震荡区间,即驾驶员在小距离范围内调整自车车辆,使其维持在期望跟车间距附近。图7所示为2个典型跟车场景的vr与L的变化关系曲线。
由图7可知:场景1、2的曲线都呈现螺旋状,即在稳速跟车过程中,vr与L在一定区间范围内波动。当驾驶员有跟车意图时,使自车不断接近前车以达到期望的L;在稳定跟车一段时间后,由于前车减速使两车间距迅速减小,驾驶员经过一小段反应时间后,立即采取措施使vr逐渐减小。
3.2.2 加减速跟车阶段
加速(减速)跟车阶段,自车快速靠近(远离)前车,相对速度不断变小(变大),两车之间的距离逐渐减小(扩大)。图8为随机选取的两段加减速跟车场景中vr与L的变化关系。
图8a)中L先增大后减小,在出现Lmax之前有一个调整过程;图8b)中L先减小后增大,在出现Lmin之前有一个调整过程。从图8中圆圈内区域可以看出:在加减速跟车过程中,当L即将达到驾驶员的期望跟车间距时,驾驶员将进行多次的加速/减速动作以调整vr,从而使自车与前车达到大致的稳速间距,进入稳定跟车阶段。
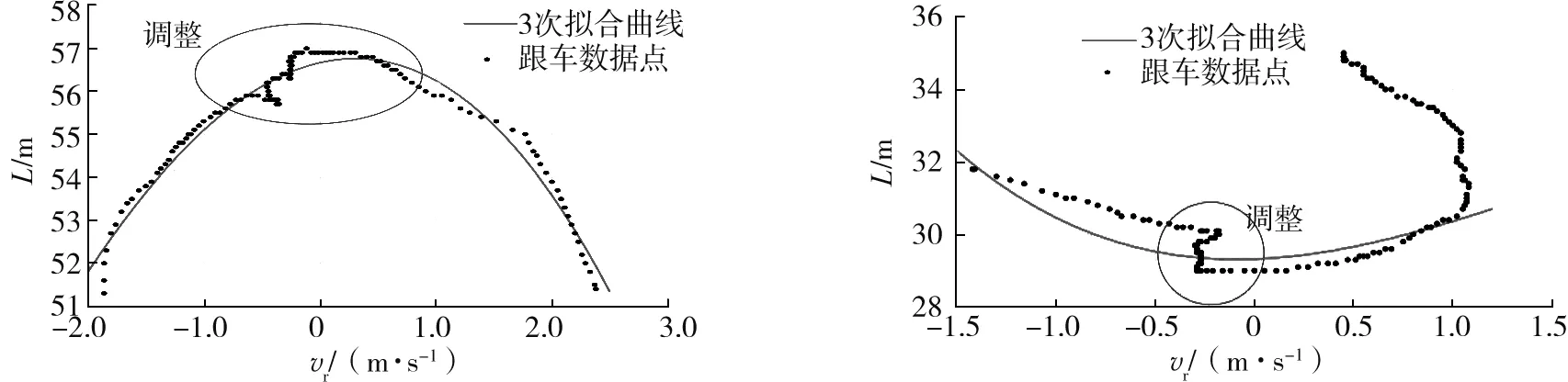
a)加减速跟车场景1 b)加减速跟车场景2 图8 加减速阶段L与v的变化关系
3.3 跟车过程加速度特性分析
从76段跟车数据中分别随机选取2段加速和2段减速跟车场景进行分析,首先将加速阶段场景1、2的数据点进行3次拟合,其拟合函数为:
式中:a1、a2分别为2个加速跟车场景的自车加速度;t1、t2分别为2个加速跟车场景的车头时距, 即L与v的比值,能够表征驾驶员在跟车过程中的安全性。
加速跟车场景中跟车时距与自车加速度的关系曲线如图9所示。
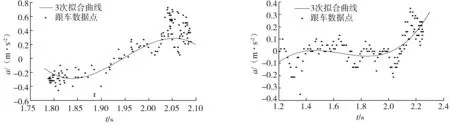
a)加速跟车场景1 b)加速跟车场景2 图9 加速跟车时t与a的关系曲线
由图9可知:在2个加速跟车场景中,t与a呈正相关,即当t不断增大时,车辆会有一个加速的过程以增大v,从而达到期望的L。
将2段减速跟车场景3、4的数据点进行3次拟合,其拟合函数为:
式中:a3、a4分别为2个减速跟车场景的自车加速度,t3、t4分别为2个减速跟车场景的车头时距。
减速跟车场景中跟车时距与自车加速度的关系曲线如图10所示。
由图10可知:t与a呈负相关,即随t的增大a不断减小。当t不断增大时,驾驶员有一个减小油门或踩制动踏板的过程以减小v,从而达到期望的L。
3.4 跟车间距、自车车速与加速度的关系
为了分析L、v与a之间的关系,将L以10 m为一挡进行划分,然后对划分后相应范围中的加速度求平均值,为了便于观察规律,将三者的相关性用三维柱状图表示,如图11所示。
由图11可以看出:L、v与a之间并未有明显的变化规律。由于在稳定跟车阶段a变化不大,以及试验数据有限,三者之间没有呈现明显相关性。
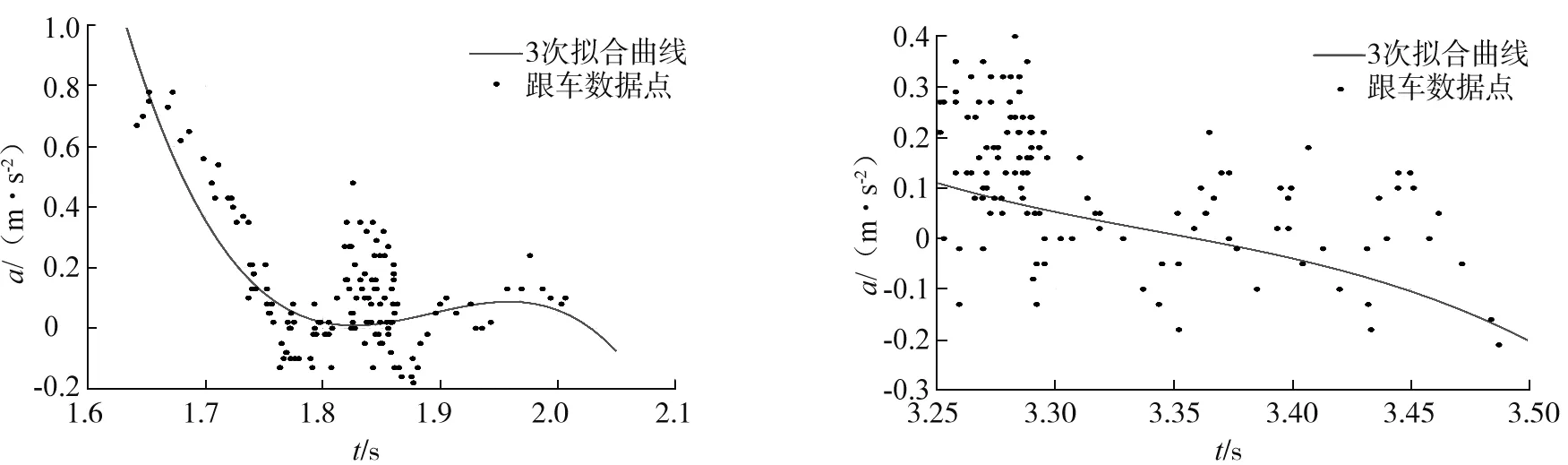
a)减速跟车场景3 b)减速跟车场景4 图10 减速跟车时t与a的关系曲线
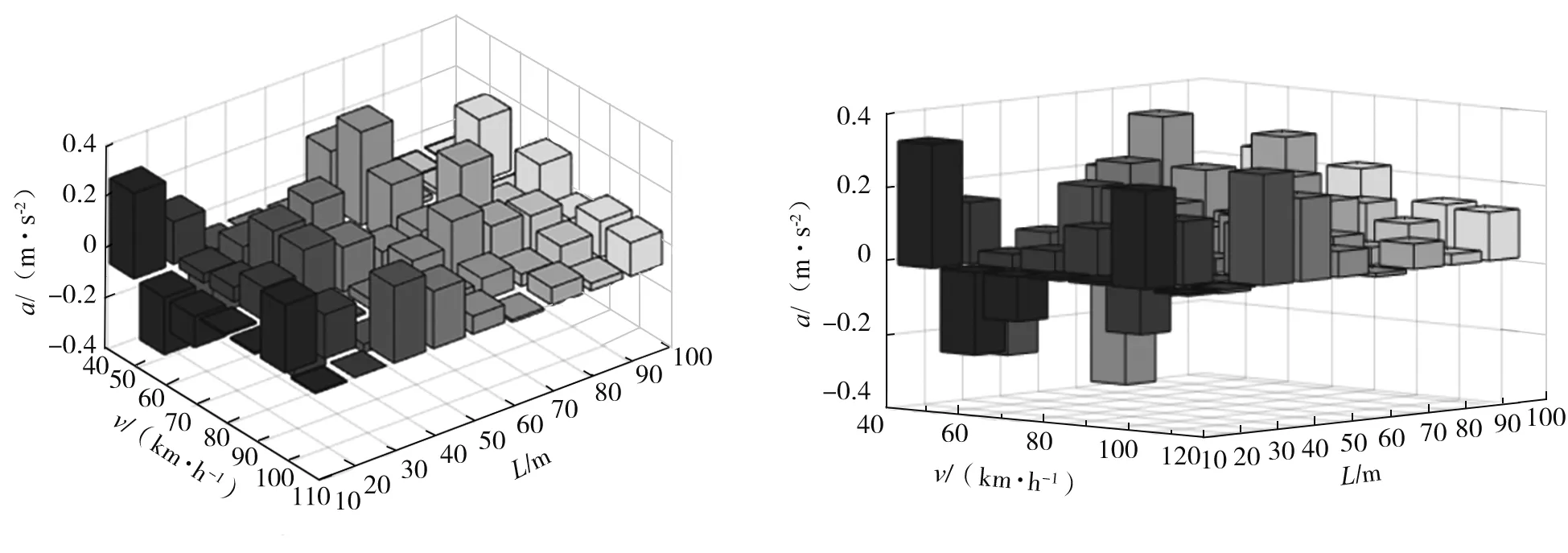
a)三维俯视图 b)三维侧视图 图11 跟车过程中v、L与a的关系
4 结语
1)采集驾驶员高速自然驾驶跟车数据,采用Matlab/Simulink程序联合CANape软件对采集到的数据进行筛选,筛选出唯一的跟车目标以及跟车过程中的跟车参数。
2)驾驶员在高速公路跟车过程中跟车间距与自车车速呈正相关,且自车车速较大时驾驶员跟车间距波动范围明显;在稳速及加减速跟车过程中跟车间距处于动态平衡状态,存在调整阶段。
3)加速过程中车头时距与后车加速度呈正相关,减速过程与之相反;跟车过程中自车车速、加速度以及跟车间距没有明显的相关性。