一种新的激光发射系统准直方法
2020-12-04李春娜
刘 琳,李春娜,李 林,王 岳
(1.北京理工大学,北京 100081;2.华北光电技术研究所,北京 100015)
1 引 言
在高能激光发射系统中,高能激光需要持续瞄准目标数秒钟,因此,发射系统在对目标进行跟踪和瞄准时,必须具有较高的瞄准精度[1]。在光电系统中实现高精度的跟踪瞄准是一个具有挑战性的问题,因为光学系统光轴很长,同时目标是移动的[2]。此外,强激光的波长较长,常规CCD是接收不到的[3]。为了使光轴精度达到微米级的量级,传统的对准方法通常需要复杂的工具,且校准精度不高。本文提出了一种适用于这种情况的新的解决方案。采用辅助光源和参考镜准直方法,以最少的辅助工具和测试设备完成了系统的光轴调整。该方法具有以下优点:(1)采用辅助光源,避免高能激光对人体造成伤害;(2)调试光路简单易操作;(3)基于CCD的检测方法,可以提高系统装调精度。该方法不仅适用于室内调试,而且适用于外场对设备进行快速检测和校准。
2 系统结构
2.1 激光发射系统的组成
高能激光发射系统具备光束定向发射和跟踪瞄准的功能。由光束控制和发射系统、高能激光、可见光监视和控制系统组成,如图1所示。高能激光由高能激光器提供。可见光监视系统由长焦镜头和CCD组成,用来对物空间成像。控制系统通过目标信息的反馈,控制软件调制跟踪精度。光束控制和发射系统由跟瞄转台带动一个大口径的离轴反射光学系统构成。跟瞄转台由方位旋转和俯仰旋转组件构成。高能激光发射系统工作时必须使高度集中的能量会聚并持续照射在目标固定点上。因此,系统的跟踪瞄准系统必须具备极高的瞄准精度。往往需要微弧度量级。为了达到这个目标,激光发射系统需要将精度分解在不同组件以及每个组件的配合精度上。
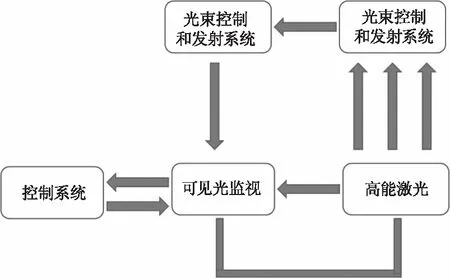
图1 高能激光发射系统的组成
2.2 光学系统组成
高能激光发射系统的光学部分集中于系统的光束控制和发射系统上,由3个组件组成。分别是轴系传输光学、发射望远镜和监视光学。如图2所示。1是轴系传输光学,安装在跟踪瞄准转台下方,不随轴系旋转运动;;2是发射望远镜,由离轴抛物面镜组成,绕转台轴系进行方位和俯仰旋转;3为监视光学,包括精跟踪可见镜头和监视镜头,同轴系传输光学一样不随轴系进行旋转运动。高能激光由激光器出射,经轴系传输光学和发射望远镜出射,聚焦在远距离的目标上;同时,目标能量经过系统会聚到监视镜头CCD上。
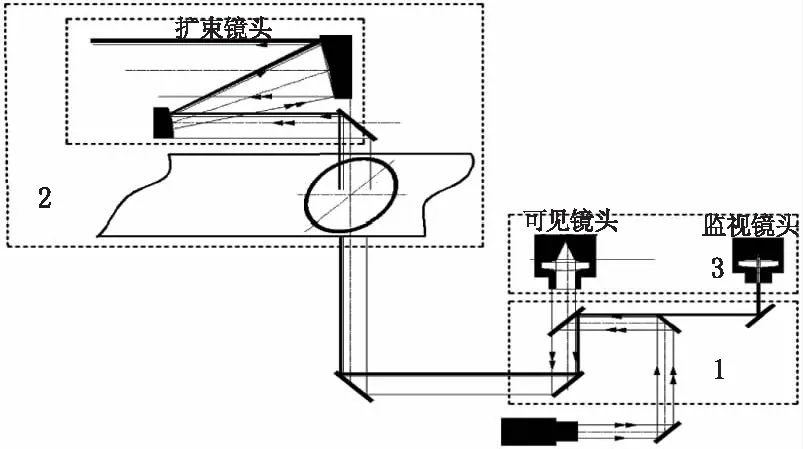
图2 高能激光发射系统的光学组成
3 装调方法及步骤
3.1 装调原则与精度分解
高能激光发射系统的装调原则是保证高能激光光束始终沿发射系统的光路发射出去。即当目标进入系统时,光轴在方位和俯仰机械轴旋转时始终瞄准目标。由于轴系加工误差、光机配合误差、光机装调误差、测试误差等,靠硬件直接装配达到微弧度的光轴精度,是不可能实现的。需要后期进行光轴补偿。采用闭环反馈控制补偿的方法进行,即通过实时测量光轴偏移量,采用两维高精度微结构根据数据反馈进行调整补偿。从而达到高精度的系统精度。两维高精度补偿微结构的行程小、精度高,因此,系统硬件装配的稳定精度也要首先保证毫弧度的角度偏差。系统精度分配和调试目标都是将误差控制在3 mrad以内。
采用自上而下的原则根据系统精度要求分解出影响系统精度的因素。对不同因素进行设计和调试,最后综合各个因素的误差,分析系统是否达到精度指标要求。影响系统精度的因素有很多,本文在这节只介绍光机装调的方法和步骤,在下一节对主要误差做精度分析。
工艺设计通过合理分配每个零部件的加工精度、设计正确的装配基准以及安排易操作的调试步骤,使系统的方位和俯仰两维的光学轴和机械轴在旋转时基本保持一致。即保证目标在进行两维高精度微结构反馈补偿之前,系统能满足微调结构对系统的精度要求。
3.2 装调步骤
3.2.1 轴系传输光路装调
激光武器发射的光波能量强,波长长,不能用普通CCD接收。本系统在装调时采用DPLL绿光激光器代替高能激光,由调试切换镜切换进调试光路,再由普通CCD进行监测和调试。避免了直接采用高能激光进行装调的危险,同时将监测结果可视化,提高了装调精度。
装调的主要思想是采用激光自准直法测量系统的偏角。再根据偏角判断光机系统的调试方向,将需要调整的光机组件调整至系统光轴中心。该方法简单易行,只要能保证测量物体与接收器之间的距离,就能获得足够高的测量精度。自准直法测量辅助工装为一个平面反射镜,具有两维度可调可锁紧的安装结构。调试时,将方位轴系和俯仰轴系作为两个组件单独进行。装调方法如下。
(1)方位轴系装调
a)DPLL绿光激光器代替高能激光,由激光切换镜切换进调试光路;
b)通过精电视CCD监视方位参考镜返回的反射光斑。用手缓慢转动方位轴,则光斑在监视器屏幕上做圆周运动,不断调整方位参考镜上的调整螺钉,使光斑运动的圆周直径最小。
测量光斑运动轨迹的直径,为方位轴系的跳动量δ1。如图3所示。
c)紧固方位参考镜,使之位置相对光路固定,做标记。在调试过程中,方位参考镜不再调整,重新安装均以标记为准,装至原始位置。

图3 方位轴系装调光路
(2)方位旋转轴与精跟踪可见光学的光轴一致性调试
a)撤离系统的45度转折镜1,放置自准直平行光管。
b)自准直平行光管出射平行光,经参考镜1反射,其反射光斑可通过自准直平行光管和监视光学CCD接收。调整自准直平行光管,使目镜中的反射像位于视场中心。如图4所示。
c)微调监视光学CCD,使其显示的反射像位于CCD视场中心。固定监视光学CCD。
d)撤掉自准直平行光管。恢复系统光路。
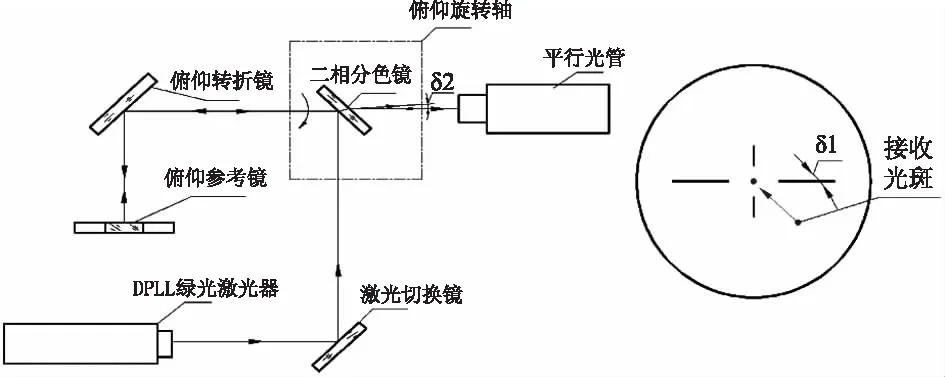
图4 方位旋转轴与监视光学的光轴一致性调试光路
(3)俯仰轴系装调
自准直仪出射的平行光经方位反射镜反射,沿原光路反射回自准直仪。用手缓慢转动俯仰轴,则光斑在接收视场内做圆周运动。
不断调整方位反射镜上的调整螺钉,使光斑运动的圆周直径最小。
测量光斑运动轨迹的直径,为俯仰轴系的跳动量δ2。如图5所示。

图5 俯仰轴系装调光路
3.2.2 激光光束监测系统光路装调
撤掉DPLL绿光激光器和切换镜,将高能激光的功率调制1 W出射。使得高能激光传输至方位参考镜,经方位参考镜反射,反射光束沿原光路返回,由精跟踪可见CCD接收。接收光斑虽然很弱,仍然可在CCD上形成一个光斑,移动激光器,将光斑调制可见CCD中心。使得高能激光与精跟踪视轴共轴。如图6所示。
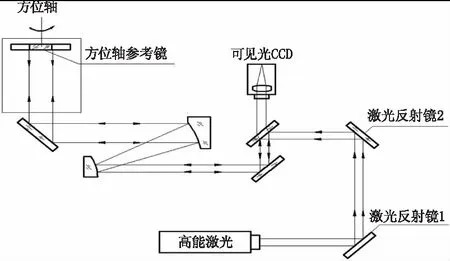
图6 激光光束监测系统光路装调
4 结果与分析
根据激光发射系统和光机的装调步骤,对激光光束经转台出射后方位和俯仰的调试精度进行分析。
其中,可见光精跟踪视轴和高能激光出射光轴之间的平行度误差是整个激光发射系统的关键,以此作为分析总目标项。根据两维高精度微结构的性能要求,光轴平行度误差应该控制在3 mrad以内。
光轴装调的精度主要包括光机系统零件加工误差和综合误差。光机系统误差分为方位和俯仰机械轴系加工误差和光学装配误差。综合误差包括CCD测量精度,自准直仪测量误差和人眼判读误差[1]。
在进行误差合成时,认为各误差项相互独立。列出表1对系统误差的来源、分布和标准偏差的大小做出说明。
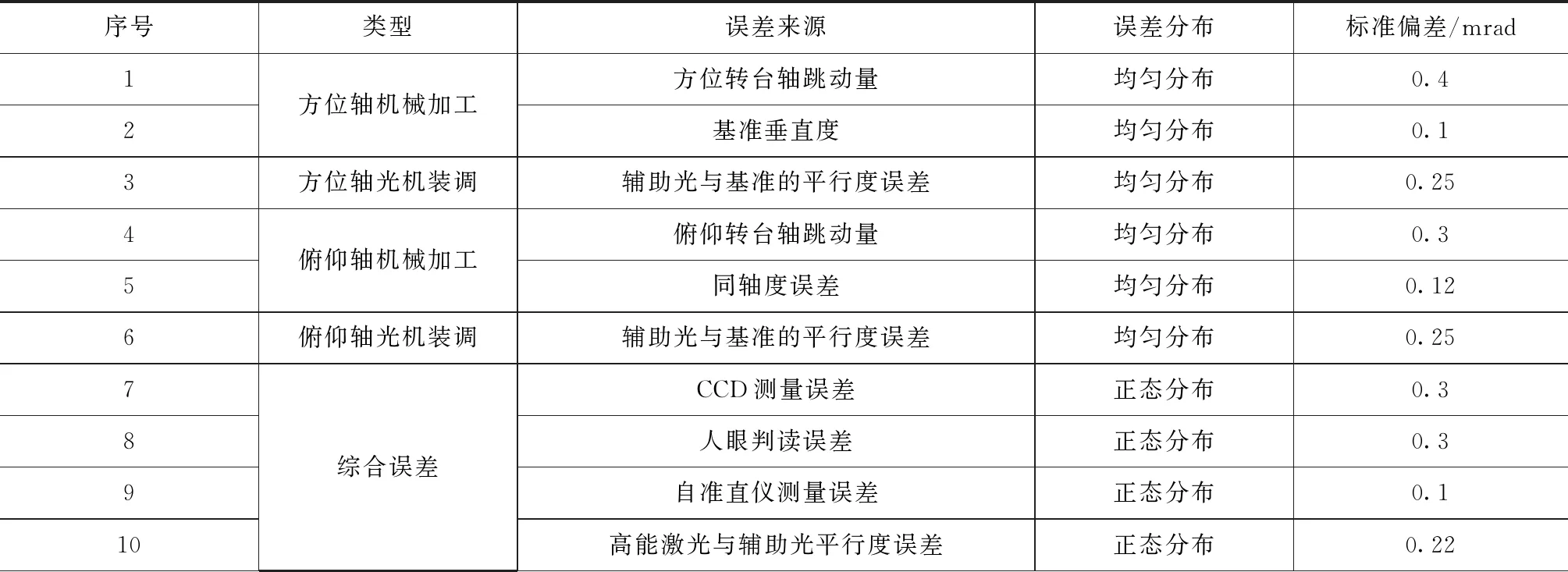
表1 系统误差的来源、分布和标准偏差的大小
4.1 计 算
方位轴系误差:影响方位轴系误差的误差项有1,2,3,7,8,9,10。方位轴系光轴平行度装调误差的标准偏差合成为:

(1)
俯仰轴系误差:影响俯仰轴系误差的误差项有4,5,6,7,8,9,10。俯仰轴系光轴平行度装调误差的标准偏差合成为:
(2)
(3)
从以上的误差分析可以看出,光轴平行装调误差的标准偏差σsystem为0.94 mrad,把它视为正态分布,则Δsystem=3σsystem=2.82 mrad。
4.2 分 析
为保证更高系统精度的需求,根据使用环境,分析系统误差的各项因素,采用以下技术途径来提高系统精度。
辅助光与基准的平行度误差由下式计算:
(4)
其中,n是像元数;α是像元尺寸;π/180是弧度与角秒的转化系数;f′为会聚镜头的焦距。可见,可以通过提高会聚镜头的焦距或者缩小像元尺寸、增多像元数量,来提高辅助光与基准的平行度误差的精度[4]。
方位和俯仰机械加工的精度往往关乎成本预算,高精度的同时意味着高昂的加工成本。因此,机械加工精度的提高要充分考虑系统的综合性价比。
CCD和自准直仪的测量误差是产品本身的制造误差,可以通过购买使用更高精度的测量设备来提高。
5 结 论
针对高能激光发射系统的光轴对准问题,提出了一种新的对准方法,该方法具有较高的瞄准精度。这种方法为构建高质量的光学对准系统提供了一种更简单、更经济、更高精度的方法。通过理论分析与精度计算,验证该方法达到了毫弧度的精度量级,用以提供给后续微动补偿机构,形成闭环,使整个系统达到微弧度精度。除了辅助光能避免人员在调试过程中受到伤害而外,参考镜准直系统成本更低、操作更为便捷,具有可进行外场调试的优点。在车载激光高能发射系统中经过试验验证,系统硬件装调达到了3 mrad的精度,经过微调系统的补偿,最终系统达到了10 μrad的瞄准精度。
