压电驱动水下微距调焦研究进展
2020-12-04孙立宁
李 冲,梁 康,孙立宁
(1.江苏科技大学 机械工程学院, 江苏 镇江 212003;2.苏州大学 机器人与微系统研究中心, 江苏 苏州 215021)
0 引 言
海洋工程装备是《中国制造2025》重点发展领域之一,是衡量一个国家制造业水平和核心竞争力的重要标志,是实现国家海洋战略的重要发展方向。水下微距相机作为海洋探测器在水下环境中近距拍摄细微目标的关键设备,在海洋探测中发挥着举足轻重的作用。随着海洋探测环境的复杂化和作业任务的精细化,为了保证相机具有较高的定位精度和图像采集效果,要求微距调焦系统具有快速响应、高精度定位及不受环境干扰等性能。
微距调焦是用作微小距离下摄影的一种近距调焦方式,主要用于拍摄十分细微的物体,如海洋生物及海底不明物等。为了对距离极近目标精确对焦,微距镜头要能够拉伸得更长,以使光学中心尽可能远离感光元件。同时,在极近距离下,微距调焦还会受到不确定水下扰动的干扰,加深了聚焦时系统的不稳定性,使得微距相机的对焦更加困难,故而对调焦系统响应速度和定位精度提出了更高要求。
目前相机微距调焦最常用的驱动方式仍是采用电磁电机驱动,而电磁电机相对较低的响应特性是影响快速微距聚焦的关键因素之一。此外,海洋环境中不仅存在天然磁场而且还具有由于海水及探测器在地磁场中运动产生的不同程度的感应电磁场[1-2],虽然海洋磁场对电磁电机的正常运行影响很小,但在特定环境下其对微距调焦系统的精度及稳定性仍会产生微弱干扰。因此,可通过改变微距调焦驱动方式来应对瞬息万变的水下微距摄像环境。可选驱动方式有静电驱动、形状记忆合金驱动、压电驱动等,其中压电驱动兼具响应速度快(响应时间<1ms)、定位精度高(纳米级)、能量密度高、输出效率高及环境适应性强等优点,在光学镜头驱动中应用越来越广泛[3-4],而日本佳能公司则是最早将压电驱动应用于相机调焦系统的典型案例。
鉴于上述背景,本文将对压电驱动在相机调焦中的应用进行分析、研究和总结,提出了一种用于水下细微目标聚焦的压电驱动微距调焦系统,并为压电驱动在水下微距调焦中的应用提出建议。
1 压电驱动在调焦应用中的研究现状
压电陶瓷作为一种智能材料,因具有远高于传统电磁电机的毫秒级响应速度和纳米级定位精度,而在微型机器人、精密定位系统、生物医学工程及航空航天等精密驱动领域获得广泛应用[5-8]。
1.1 国外压电调焦研究现状
相机调焦系统的驱动是压电驱动在精密定位领域的一个重要应用,在水下环境中,万物均处于实时动态变化中,水下相机采集近距细微目标图像的效果取决于微距调焦系统的响应速度及定位精度。国内外研究机构和学者在调焦系统压电驱动方面取得众多有价值的研究成果。日本佳能公司早在1987年就将自主研发的环状压电超声电机应用于EOS相机调焦系统,如图1所示,压电驱动的应用不仅使相机能够快速聚焦,同时实现了相机结构简化和重量减轻,目前佳能已在30多种型号的相机中安装了压电电机[9]。
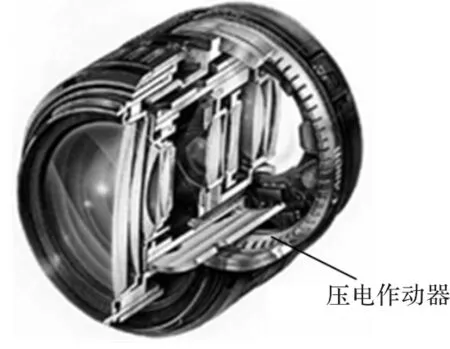
图1 佳能相机镜头
2002年,宾夕法尼亚州立大学学者Burhanettin Koc等[10]研制出一种采用金属柱体弯曲振动模态的单相驱动微型压电超声电机,被韩国三星公司成功应用于手机相机的调焦系统中。随后,Sigma、Nikon、Pantex等公司也采用压电驱动实现相机调焦。近年来,学者对于应用压电驱动各种光学镜头调焦系统的研究热度逐渐增加,日本学者Masahiko Hoshina等[11]应用一种球状压电超声电机进行管内检查相机的定位和驱动,实现相机能够沿管子进行360°转动,如图2所示。澳大利亚A. Michael等[12]利用8只长800 μm、厚1.5 μm的压电薄膜设计了一种用于面外微镜头移动的作动器,如图3所示,该作动器通过压电薄膜的弯曲弹性变形驱动微型镜头运动,能够实现24 μm的静态面外位移,与其他镜头驱动机构相比,该机构能够实现更高的响应频率,适合快速作动。
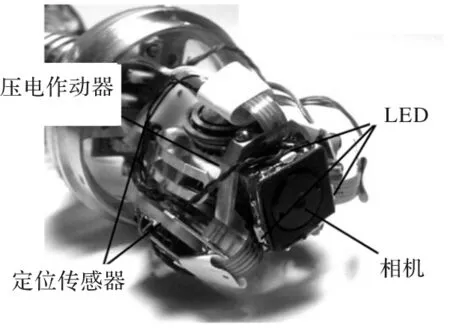
图2 球形相机定位系统

图3 微型镜头移动机构
基于压电驱动,美国Nazmul Hasan等[13]设计了一种可调聚焦自适应眼镜,该眼镜对于改善目前人们的视力退化具有重要的实用价值,如图4所示。根据手机相机拍照所需的高可控性和自动聚焦特点,韩国Hyun-Phill Ko等[14]研制出一种用于手机相机自动调焦的压电作动器,如图5所示,在聚焦时,压电作动器响应时间仅为自动聚焦时间的1%,且仅仅当其工作时才消耗能量,平均瞬时功率仅为65 mW,在能量转化效率方面远高于传统电磁机构。
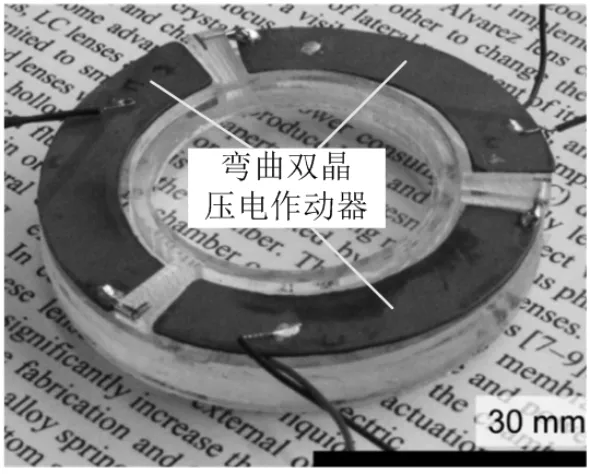
图4 可调焦眼镜镜片

图5 手机自动调焦镜头
1.2 国内压电调焦研究现状
虽然国外在相机调焦压电驱动领域处于领先地位,但近年来国内研究机构及学者在压电调焦方面亦获得迅猛发展,典型代表有中科院长春光机所、南京航空航天大学、清华大学、北京大学等。由于在激光直接写入设备中需要有高分辨力的调焦机构对光刻物镜进行调焦,中科院长春光机所刘伟等[15]基于压电驱动研制了一种用于激光直接写入设备的调焦伺服机构,该机构的分辨力为10 nm,行程为10 μm,导向精度1.37″,是适合纳米定位的理想调焦机构。针对胶囊内置镜头的运动控制的要求,南京航空航天大学王皆宸等[16]设计了一种基于螺纹型压电超声电机驱动胶囊内窥镜调焦机构,该机构的直线前进速度和后退速度分别为137.3 μm/s和164.5 μm/s,直线行程超过5 mm,且该调焦机构结构简单、有良好的精密定位能力,又因采用压电驱动,该医疗设备可与核磁共振成像MRI相兼容。
清华大学周铁英团队[17]设计和制造了一种螺母型超声电机驱动的集成透镜调焦系统,如图6所示,该系统以光学镜头作为转子,粘有压电元件的多面体铜管作为定子,成像传感器安放在定子轴的底部,驱动芯片控制电机运行,转子的外螺纹与定子的内螺纹相互啮合,该系统工作时功耗小于0.25 W,静止时功耗为0,调焦精度小于10 μm,响应时间小于10 ms。北京大学董蜀湘团队[18]研制一种螺旋传动压电微电机用于微型相机自动聚焦和变焦,如图7所示,该系统由中空压电定子作为螺母定子,中空转子和镜头相连作为螺柱,沿轴向产生螺旋运动,实现透镜自动调焦。

图6 清华大学研制压电调焦系统
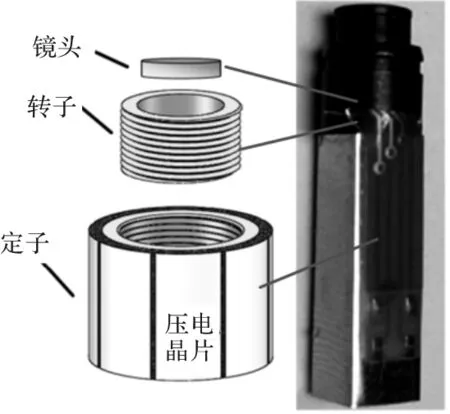
图7 北京大学研制压电调焦系统
2 压电调焦机构耦合动态特性研究现状
压电调焦机构/驱动系统与结构或工作环境间的耦合,会对其动态输出特性产生重要影响,造成系统定位精度降低和稳定性减弱,针对此问题,国内外学者进行了大量研究,取得众多创新性成果。新加坡国立大学Zou Yongchao等[19]对基于压电驱动可调焦内窥镜进行了动态调焦特性分析,同时对可调焦镜头的动态响应速度进行了测试。考虑梯度弹性、压电效应和挠曲电效应,突尼斯Baroudi等[20]利用哈密顿原理建立了压电挠曲电纳米梁的多场耦合动力学数学模型,通过伽辽金假设模态法推导了耦合系统的机电耦合方程及边界条件。法国学者Cardoso-Ribeiro等[21]对压电激励下的流-固耦合系统进行了建模与分析,通过简化问题分析求解、数值近似方法和系统识别技术三种方法获得了系统的状态空间模型,结果显示理论求解与实验结果一致。
此外,为了提高激光直写调焦系统的稳定性和响应速度,浙江大学闫玮等[23]从弹性力学角度出发,对压电调焦机构进行了动态特性建模,并全面分析了其动态响应特性,缓解了系统相位滞后的问题,从而使系统获得了较好的稳定性和响应速度。清华大学陈柱子和陈宇[24]对一种可用于镜头调焦和变焦的面内弯曲行波压电超声电机进行了模态特性分析,求解了不同模态下的响应相位,分析了压电行波驱动机理。
3 压电调焦机构控制系统研究现状
对于压电驱动调焦系统,控制系统的性能是影响其响应速度和稳定性的关键因素之一,因此,国内外学者对于提高调焦系统的控制性能方面进行了大量研究。澳大利亚Yik R. Teo等[25]基于积分力反馈构建了一种PI跟踪控制器,通过压电物镜定位器验证了该种控制器的控制效果,结果显示其频率跟踪带宽可达255 Hz。此外,Michael等[26]利用由光学位移传感器、带有反馈增益的90°移相器和正向通路作动器构成的反馈系统对快速压电微镜头作动器进行了驱动控制,在驱动频率为750 Hz时,驱动器最小开关时间仅为2.5 ms。美国Xu Jiawen等[27]对基于压电超材料梯度指数的聚焦声波可调镜头进行自适应控制,通过调整RL电路的感性负载实现横波自适应聚焦。
国内中科院上海光机所、南京航空航天大学、上海交通大学、国防科技大学等单位对压电驱动镜头调焦系统进行了控制策略研究。为了提高共焦差动并行激光直写中光束刻写质量,中科院上海光机所周常河团队[28]设计了调平聚焦伺服控制系统,利用差动像散检测方法和比例积分微分(PID)反馈算法减少光源和外部干扰的误差,获得高灵敏度、高精度、高稳定性的探测曲线,通过动态聚焦压电陶瓷伸长量可保证在焦深范围内焦点位置辨别精度可达纳米级,调焦平台的倾斜角和俯仰角在1×10-5rad左右。南京航空航天大学潘松等[29]采用传统比例-积分-微分控制(PID)和模糊控制提出了超声电机直驱的电动物镜并行切换控制策略,将两者结合建立了宏微相融合的预测控制方法,实现了物镜转换器的高精度、快速切换控制,电动物镜转换器的重复定位误差小于0.015°。上海交通大学程昊、胡洁[30]使用压电陶瓷作为对焦运动机构,并采用BP神经网络和PID控制相结合的方式来控制数字化显微系统对焦运动,新型对焦技术和运动机构的使用大幅提高了对焦速度。国防科学技术大学戴一帆团队[31]针对横向压电驱动变形镜的迟滞特性,设计了静态的PID闭环校正系统,并进行了校正实验,闭环校正后线性度得到明显提升,迟滞率可降低至1.8%。针对数字共焦显微技术中压电陶瓷物镜驱动系统,广西大学陈华等[32]分析了模糊PID控制器的控制性能,提出了离线优化思想,经优化的初始参数配置于模糊PID控制中,对系统进行在线实时反馈调整,控制系统进行步进定位驱动,采用该种方法提高了系统的响应速度。
4 目前存在的问题与不足
从已有的成果可知,虽然国内外研究机构及学者在压电驱动调焦领域已取得众多有价值的成果,但在水下微距调焦应用方面仍存在如下问题与不足:
(1)压电驱动在调焦机构中的成熟应用大多集中在民用相机调焦、显微镜物镜调焦、手机相机调焦等领域,而在水下环境微距调焦应用中仍存在不确定扰动引起的聚焦困难以及调焦系统耦合振动造成的系统不稳定等问题。
(2)目前调焦系统动态特性的研究大多只考虑系统自身的动力学特性以及结构与压电之间的耦合特性,而基于不确定水下扰动载荷作用下微距调焦系统的机电耦合动态特性问题需要进行深入研究。
(3)调焦系统的运动控制目前采用PID控制或者PID控制与模糊控制、BP神经网络相结合的形式,PID控制器是一种有源校正装置,其控制的质量对受控对象的变化不太敏感,受到外界扰动尤其是外界负荷发生变化时,受控对象特性会发生很大变化,由于水下环境中存在众多不确定扰动,PID控制无法根据微距调焦系统受到的不稳定载荷做出调整。
5 未来发展趋势
根据压电驱动在水下微距调焦应用中存在的问题和不足,可总结出其未来发展趋势:
(1)各种适合水下环境中应用的压电调焦机构需求越来越广泛,由特定使用环境带来的微距调焦机构的密封、抗干扰性等问题在未来会越来越受到专家学者的关注。
(2)扰动载荷激励下微距调焦系统压电与结构间的相互耦合作用以及系统不同结构间耦合度的弱化问题是影响压电驱动水下微距调焦机构动态特性的关键因素,是压电驱动在水下环境应用中不可避免的问题,也是未来研究的重点方向之一。
(3)不确定水下扰动对微距调焦控制系统稳定性的影响是实现压电驱动水下微距调焦系统高精度稳定控制的难度,同时也是学者在未来需要着重研究的重点。
为了实现水下微距调焦机构的快速响应、高精度定位和大位移调焦,本文提出了一种基于压电驱动的微距调焦机构,工作原理如图8所示,该系统集压电驱动、谐波传动、精密活齿传动、螺旋传动于一体,压电微距调焦系统由四路相位依次相差π/2的正弦信号驱动,通过柔性铰链位移放大作用后,形成连续谐波,驱动微型活齿传动机构输出旋转运动,经过螺旋传动,镜头获得直线运动。

图8 压电驱动水下微距调焦机构
与其他压电调焦机构相比,本文提出的压电微距调焦系统具有镜头移动位移大、移动速度可调、驱动力大、驱动及减速集成化、驱动系统定转子间以及镜头连接支架与导轨之间滚动接触、使用寿命长等优点,适合水下细微目标拍摄的微距调焦。
6 结 语
随着科技的发展,海洋探测越来越受到国家的重视,水下微距相机作为在水下环境中近距海洋探测的关键设备,其性能对探测的质量产生重要影响。为了保证相机具有较高的定位精度和图像采集效果,具有快速响应、高精度定位及不受环境干扰等性能的微距调焦机构迫切需要研制出来,压电驱动因其自身优点而成为高精度调焦机构驱动的首选。压电与水下环境的耦合问题以及扰动对控制系统控制精度的影响是未来研究的重点。