步履行走器在保护建筑旋转平移中的应用
2020-12-01赵明华
赵明华
瑞安管理(上海)有限公司 上海 200021
1 工程概况
喇格纳小学旧址属于上海市黄浦区淮海中路街道大华居委,为旧时法租界与华界的接合处,1935年9月由法公董局创办,把学校地产与房产交给公董局开办华人小学,解放后作为学校建筑使用。逾70 a来,学校校址、校名屡屡变动,也曾改办为中学,一些学校曾先后并入学校,现为比乐中学校址。
目前校舍内呈“T”字形平面的建筑为1935年建,于2008年9月23日公布为区级登记不可移动文物,现为区文物保护点。建筑总面宽约42 m,总进深约62 m。西段为东西向布置,南侧教室三间,北侧为办公,进深约7 m,外廊宽2.7 m;东段为南北向布置,教室3间,进深约7 m,外廊宽约2.8 m。总体呈“T”字形平面格局(图1)。
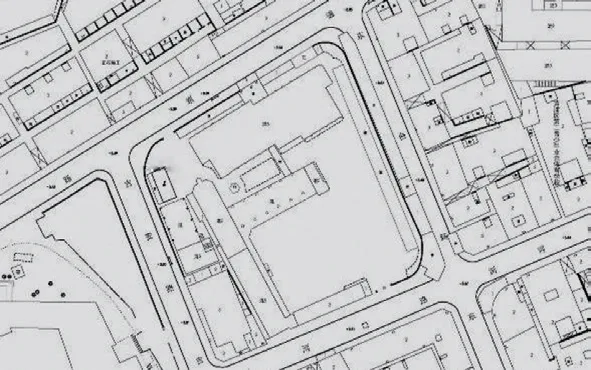
图1 建筑现场位置示意
1.1 平移原因
该历史建筑留存情况一般,建筑艺术和科学价值一般,其文物价值主要体现于人文、社会价值,值得保留的元素和构件不多。考虑到喇格纳小学旧址目前留存的主要是位于地块中央的建于1935年的钢筋混凝土现代建筑,该建筑平面呈“T”字形,对整个地块的开发和再利用将存在一定的问题(图2)。该种风格的建筑保护施工在上海法租界有一定数量的实例可寻,且存有施工质量较高的案例,建议将建筑整体在本地块内移位保留。

图2 新旧址关系示意
2 平移工艺比选
滑轨式平移装置目前有滚轴[1]、固定滑脚、悬浮式滑脚[2]和步履式行走器4种。滚轴利用滚动原理实现移位;固定滑脚即在上托盘下侧安装固定的支座,在下滑道上实现滑移;悬浮滑脚是在固定滑脚的基础上升级成千斤顶竖向可调悬浮支座;步履式行走器是在悬浮滑脚的基础上升级成自带动力的交替式顶推滑移装置。
对4种滑轨式平移装置的工期、造价以及存在的风险进行综合比选,最终从安全角度考虑,决定选择步履式行走器平移装置。
步履式行走器平移装置具备了自动悬浮和交替行走两大特点,同时能满足整体旋转平移的功能要求(图3),适用于本工程。
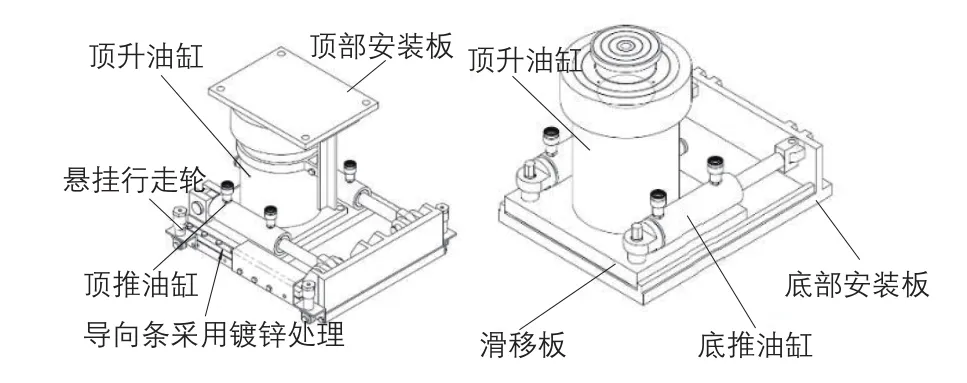
图3 步履行走器设备三维图
3 施工方案
3.1 总体施工步序
步骤一:先开挖土方,浇筑平移筏板,再浇筑上托盘梁等。
步骤二:安装步履行走器,利用PLC同步控制整体旋转平移。
步骤三:利用PLC同步设备控制整体顶升0.7 m。
步骤四:结构连接,浇筑首层楼板,拆除设备及上托盘梁等。
3.2 上托盘梁及旋转筏板布设
3.2.1 上托盘梁
根据原结构荷载及旋转平移时设备的安装位置,按最不利工况进行模拟数值计算。墙体托换采用常规双夹墙梁断面形式,单侧梁截面为400 mm×800 mm,托换梁顶面标高定为+4.60 m(图4)。

图4 上托盘梁布置示意
为了保证托换节点的安全,在节点位置将托换高度增加至1.2 m,托盘梁与原结构凿毛深度30 mm,保证截面摩擦力满足荷载要求[3]。
3.2.2 旋转筏板
比乐中学平移采用整体式筏板,厚度600 mm。旋转筏板厚600 mm,新址筏板厚900 mm,根据现场施工计划,临时筏板施工在新址筏板之前。
绑扎旋转筏板时,预留钢筋茬,与永久板连接,钢筋锚固深度不小于1 m。平移到位后,可采用人工凿除的方式将临时板与永久板分离,永久板钢筋与地下结构进行后锚固(图5)。
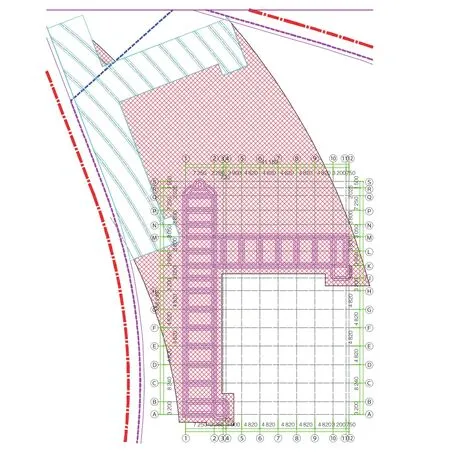
图5 平移筏板布置示意
3.3 步履行走器布设及控制
20世纪90年代,手动式泵站带动大型千斤顶进行顶推平移作业,多用于涵洞顶推。当时全凭手动控制,过程控制完全依靠人工读尺喊话进行。
2003年上海音乐厅平移,国内首次采用PLC自动化控制液压设备。通过位移传感器和压力传感器进行监控,实现多点自动化同步控制的可能。
2006年宁夏吴忠宾馆平移,正式将悬浮平移理念系统化实施,降低了平移过程中因滑道不平带来的影响,使平移过程中建筑物结构更加安全[4]。
2018年厦门后溪长途汽车站旋转平移,使悬浮系统、平移系统、滑移设施实现一体化成为步履行走器,有效减少现场的施工人员需求。步履走行器会跟随建筑物一起行走,不再需要组织人员对底部轨道和滑移块进行搬运,降低对底部行走轨道的要求,底部不再需要钢结构轨道,有效减少了轨道的投入。
该项目步履行走器布置情况如图6所示。

图6 步履行走器布置示意
3.3.1 旋转平移设计
根据建筑图纸,初步建模计算上部结构荷载为80 000 kN,然后根据设备性能以及受力分析设置55个行走控制点,每个控制点设置A、B两组交替行走器,每个行走器可以提供2 000 kN竖向承载力,55个控制点可以提供110 000 kN顶升力,安全系数为1.38。本次工程旋转平移,根据新旧址位置以及建筑结构平面图关系设置2 873 m2旋转筏板。
3.3.2 交替顶推步序
第一步:A组悬浮顶升。
第二步:A组顶推150 mm。
第三步:B组悬浮顶升。
第四步:A组水平缩回150 mm。
第五步:B组顶推150 mm。
第六步:A组悬浮支撑。
第七步:B组横向缩回150 mm。
3.3.3 顶推纠偏措施
在旋转平移施工中,虽然各道工序均严格按照要求施工,但也无法保证均按照设计的理想状态行走。各项累积偏差对建筑旋转产生的水平作用力会在旋转过程中累积并导致偏位,所以在平移前需要设置移位距离坐标监测控制点,通过现场肉眼观察配合坐标测量,反馈出建筑实际旋转轨迹,然后与设计运行轨迹进行对比。当实际路线偏离设计路线一定值后,通过调整各条平移轨道的步履行走器顶推速度比例,使得建筑回归设计路线。当偏位较大时,也可以通过调整步履行走器的角度,产生分向力,在分向力的影响下,使得建筑回归设计行走路线。
4 结语
步履行走器在国内最大的单体建筑平移旋转——厦门后溪长途汽车站项目中得到应用,技术方案成熟,而本次项目为上海首例步履行走器平移建筑,可再次验证步履行走器在历史保护建筑平移中的应用效果。
交替式步履行走器平移旋转施工工艺结合了PLC同步控制技术、液压悬浮技术、自平衡技术以及分散顶推技术,具备技术先进性、设备可靠性的特点,可为类似工程项目提供新的思路。