强干扰条件下机场道面细小裂缝自动识别算法 *
2020-11-30李海丰吴治龙聂晶晶
李海丰,吴治龙,聂晶晶
(中国民航大学计算机科学与技术学院,天津 300300)
1 引言
近年来,随着我国民用航空的飞速发展,民航安全风险管理问题日益突出,其中机场道面安全检测是确保飞行安全和机场稳定运行的工作重点。裂缝作为机场道面最常见的病害,不仅影响着飞机起降的安全性,而且极易迅速发展为板块断裂、道面剥落等各类更严重的病害。《民用运输机场运行安全管理规定》明确指出了机场跑道道面裂缝及时检测的必要性。目前,依靠人工巡检的裂缝检测方式已难以满足机场高精度、窄时限、大范围等实际要求,因此亟待研究高性能的机场道面自动化裂缝检测方法。
目前基于可见光传感器的裂缝检测方法研究已取得了诸多进展,如阈值分割、最短路径搜索、边缘检测和形态学等方法。Li等人[1]采用改进的Otsu阈值算法分割裂缝与道面背景,但该算法无法避免实际场景中油污、轮痕等非病害区域的误检。Amhaz等人[2]基于裂缝像素之间的连通性,提出最短路径选择算法,该算法可抵抗大面积阴影的干扰,但检测效果受参数选择影响。Zou等人[3]提出Cracktree算法,首先采用测地线阴影去除算法避免阴影干扰,然后构建基于裂缝种子点的最小生成树算法实现裂缝的检测,算法针对不连续裂缝可获得较好的检测结果。Shi等人[4]提出CrackForest算法,使用随机结构森林学习裂缝的结构特征,生成可识别复杂拓扑结构的裂缝检测器。李良福等人[5]构建了基于语义分割的神经网络模型,并利用滑动窗口实现道面图像分块化裂缝检测。Yang等人[6]提出一种使用特征金字塔的裂缝检测模型,通过融合多层卷积特征实现裂缝快速分割。Zou等人[7]构建一种编解码器架构的神经网络裂缝检测模型,首先融合编码器和解码器相同尺度下的裂缝特征,再将各个尺度裂缝特征进一步融合,从而实现不同尺度特征信息的有效结合。此类基于机器学习的算法有较好的检测结果,然而其性能严重依赖训练集的完备性。基于可见光图像的算法普遍利用裂缝在二维光学图像中的灰度差、线性结构和边缘等特性进行检测。然而在机场特殊场景下,道面通常存在大量的油污和轮痕干扰,且只能在夜间停航后作业,因此光照环境差,这些均导致基于可见光传感器的裂缝检测算法难以达到预期效果。
基于结构光的深度相机利用激光测距原理,捕捉并记录裂缝和道面背景的真实三维轮廓结构信息。利用三维深度数据进行裂缝检测,可避开光照条件、油污和沥青修补等各类干扰,并获得更详细的裂缝测量信息,具有重要的研究价值和实际应用意义。He等人[8]利用三维道面数据中裂缝的倾斜、高斯分布和边缘梯度等特征进行筛选,从而实现裂缝的有效检测。 Peng等人[9]结合裂缝的深度、方向特征等信息,利用局部自适应阈值法和最短路径搜索算法实现裂缝的筛选和连接。Zhang等人[10]对比了裂缝与道面在几何形态上的区别,通过分析像素的法线方向与其所在区域法线分布的差异性实现裂缝检测。Cao等人[11]利用裂缝的三维边缘梯度特征,采用基于非线性拉伸算子改进的分数阶微分模板提取裂缝的边缘。上述算法主要通过对裂缝部分几何特征(如梯度、形状、边缘斜率和深度突变等)的识别实现检测,然而实际路面中裂缝类型复杂多样且检测平台剧烈震动带来强烈噪声影响,导致此类算法容易造成裂缝的漏检和误检。此外,由于深度学习良好的特征提取性能,目前已在如行人识别[12]、车辆检测[13]等多种场景下的三维目标检测中验证了其显著的优越性,因此部分学者尝试将其应用于三维深度图像的裂缝检测。CrackNet[14]首次利用卷积神经网络CNN(Convolutional Neural Network)对沥青路面的深度图像进行裂缝检测,并获得像素级精度的检测效果,然而该算法使用预设的特征抽取器提取的特征作为卷积神经网络的输入,限制了模型的学习能力。针对此问题,Zhang等人[15]使用整体网络实现相关特征的学习与训练,同时增加了网络层数,并限制隐藏层的卷积核尺寸和特征通道数,从而减少模型参数,提高其计算速度;Fei等人[16]在CrackNet基础上,使用预处理层校正道面表面三维数据的不平整,并针对浅表裂缝易被隐藏层忽略的问题,提出Leaky Rectified Tanh激活函数,进一步提高了隐藏层对浅表裂缝特征提取能力。但是,利用深度学习进行检测的结果严重依赖训练样本的质量,若训练集中裂缝类型覆盖面不全,则无法获得较好的检测结果。
基于道面三维重建的方法通过道面主轮廓的拟合和道面病害的良好分离,可实现裂缝的有效检测及其深度特征参数的精确计算。Jahanshahi等人[17]使用Kinect传感器获得道面三维点云数据,并基于随机抽样一致算法获得道面平面模型,然后判断像素点是否位于该平面来检测裂缝。该算法有效地消除了异常点对面拟合的干扰,然而平面模型自由度过低,算法仅适用于非常平整的道面。文献[18]结合道面主轮廓的起伏对其纵横向断面的轮廓线形状影响较小的特性,采用基于最小二乘法的直线拟合算法获得道面的断面轮廓直线,该算法提高了道面整体轮廓模型的自由度,但依然无法避免其断面轮廓线的欠拟合情况。李清泉等人[19]首先利用快速傅里叶变换将道面断面的深度数据从时空域转换到频率域,然后截取对应的低频信号,从而实现道面主轮廓的获取和疑似裂缝点的分离。该算法可获得自由度较高、贴合路面走势的道面主轮廓,然而算法对截止频率取值的依赖性较大,且不同道面的主轮廓在频域的表现有所区别,因此需要根据实际场景人为设置截止频率值,否则将无法获得道面主轮廓良好的拟合结果,从而造成裂缝的漏检或错检。
面向机场道面裂缝识别的重大需求,针对机场道面表观结构复杂和检测平台剧烈震动的双重强干扰下道面细小裂缝识别困难,本文提出一种基于三维深度数据道面主轮廓提取的细小裂缝自动识别算法,通过构建L2正则化与改进贪心策略相结合的道面主轮廓提取算法(RG-spline),实现三维深度数据中道面主轮廓的准确提取和细小裂缝高精度检测。
2 结合L2正则化与贪心策略的道面主轮廓提取算法
2.1 机场道面三维深度数据分析
从机场道面中采集的三维深度数据存在大量强干扰信息,主要有2个来源:工作场景的复杂表观结构和数据采集平台震动。具体体现为:混凝土材质表面固有的粗糙纹理和大量实际检测环境中存在的异常数据(如裂缝、凸起和板块错台等),以及机场道面由于其场景的特殊性导致表面存在修补、局部刻槽等各种干扰;由于三维深度数据采集设备搭建在运动平台上,移动过程中不可避免地出现数据采集平台的震动。以上干扰具有强度大、不确定等特点,对基于深度图像的道面主轮廓和裂缝信息的精确提取造成了显著影响。图1展示了一段机场道面的深度图像(为了以二维方式显示深度图像,已将深度图像中各点的深度值归一化至0~255的灰度值),图中裂缝区域为白色矩形框标记位置。从图1中可以看出,机场道面深度图像中非裂缝区域所呈现的特征与裂缝区域相近,导致裂缝检测较为困难。

Figure 1 Depth image of airport pavement 图1 机场道面深度图像
2.2 基于三次样条曲线的道面主轮廓拟合
因施工、受强力冲压和自然环境等多种因素,道面具有主轮廓起伏变化的特点,不同位置断面的道面主轮廓为自由变化的曲线。因此,通过拟合其曲线方程能实现道面主轮廓的有效提取。常用的拟合方法有拉格朗日插值法、BEZIER曲线拟合和三次样条曲线法等。拉格朗日插值法因数据增多或间隔不均易出现龙格现象,导致曲线边缘处的拟合误差较大。BEZIER拟合法可得到符合控制点整体走势的平滑曲线,但其局部拟合效果较差。三次样条曲线是由多个二阶导数连续的分段多项式构成,其具有自由度高、曲线光滑、对数据拟合能力好的优点。因此,本文选择三次样条曲线对断面的道面主轮廓进行拟合。三次样条曲线有B样条基和截断幂基2种表示形式,本文使用三次样条曲线的截断幂基表示形式,其定义如式(1)所示:
(1)
其中,(x-tk)3=max((x-tk)3,0),tk=(k+1)/(n+2),k=1,2,…,n,U=(u0,u1,u2,u3,u3,1,u3,2,…,u3,n)是待估计曲线的系数向量,n为节点数量。
Y-XU=0
(2)
由式(2)可知,使用最小二乘法可计算出三次样条曲线的系数向量,但其基本原理是计算出估计值与观测值距离最小的系数向量,因此观测值的质量决定了系数向量的准确性。而三维深度数据中存在大量道面纹理信息、检测平台震动带来的噪声信息和异常数据(裂缝、凸起和板缝等)等干扰,导致实际拟合结果存在以下2个问题:(1)由于道面中的纹理信息影响,拟合的道面主轮廓在局部区域易出现波动(即过度拟合问题);(2)数据中还存在大量噪声信息和异常数据,此类异常数据参与计算将导致估计的系数向量偏离真实值,无法反映真实的道面主轮廓。
为解决上述问题,本文在系数向量计算中引入L2正则化约束,对道面主轮廓进行平滑;使用基于动态阈值改进的贪心策略对道面主轮廓进行优化,从而精确提取道面主轮廓。
2.3 基于L2正则化的道面主轮廓平滑
上述问题中拟合的道面主轮廓出现局部波动的主要原因为:拟合过程中三次样条曲线为追求最大拟合精度,会一定程度地忽略道面的平滑性,使得拟合结果中部分系数的绝对值大于最优解。因此,本文在最小二乘法拟合中引入L2正则化对样条曲线的系数进行约束,从而减少道面主轮廓的局部波动性。L2正则化是广泛应用于机器学习领域处理过拟合问题的方法,其主要思想是通过添加正则项对系数向量进行惩罚约束,在模型中迫使系数向量值接近0,从而实现模型拟合精度和平滑性相互平衡的目的。引入正则项λU′DU后,定义道面主轮廓的代价函数为:
Jλ=(Y-XU)′(Y-XU)+λU′DU,λ≥0
(3)

通过矩阵求导法对式(3)求解可得,道面主轮廓的L2正则化约束平滑结果为:
(4)
其中,向量X′为向量X的转置。
本文惩罚因子λ的取值由广义交叉验证法GCV(Generalized Cross-Validation)进行确认,即:
(5)
其中,矩阵Q=X(X′X+λD)-1X,trace(Q)表示Q的迹。
2.4 基于改进贪心策略的道面主轮廓拟合优化
三维数据中的异常点包含裂缝、凸起、坑洞和板缝等异常数据和检测平台震动带来的噪声数据,具有数量不确定、数据值大的特点。直接对含有这些异常点的数据进行三次样条曲线拟合将得到严重失真的道面主轮廓,因此,本文进行以下优化措施:
(1)基于贪心策略的道面主轮廓拟合优化。
(6)
此外,为正确拟合出最优道面主轮廓,应对Hj中数据点个数进行一定的约束,但是每个道面断面中异常点数量和纹理特征均有变化,导致使用固定阈值保留数据点的方式会出现异常点筛选遗漏或过度筛选的情况。而且在贪心选择过程中每次只筛选一个最大异常值数据点,极大地增加了时间成本。因此,本文采用动态阈值改进贪心策略。
(2)基于动态阈值的贪心策略改进。
根据Hj中非异常数据具有异常值小且数值分布集中的特点,采用数据的统计特征设置动态阈值能有效加快异常点筛选速度和有效保留非异常点,提高道面主轮廓拟合的精确度和速度。

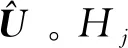
2.5 RG-spline算法流程
综上所述,本文提出的RG-spline算法步骤如下所示:
(1)使用上述基于L2正则化的道面主轮廓平滑方法对道面断面数据Hj(初始状态为H0)拟合当前最优道面主轮廓。


图2所示为RG-spline算法流程图。
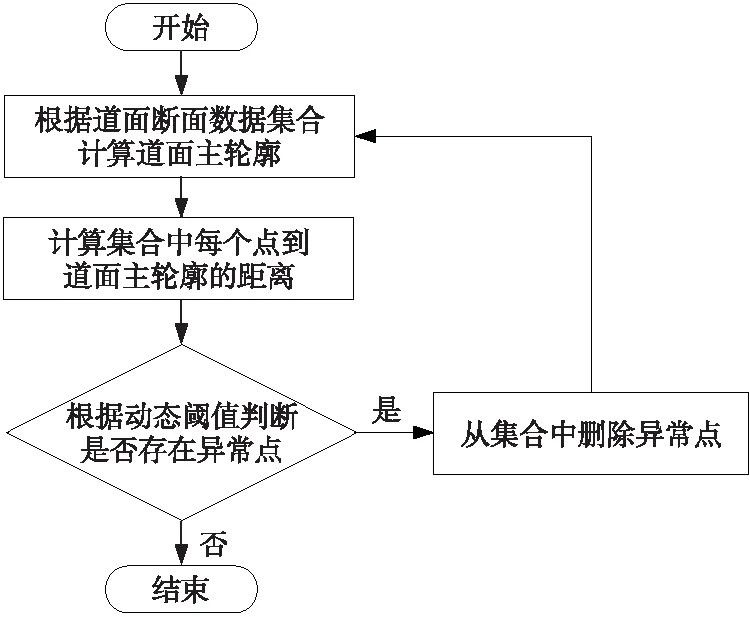
Figure 2 Flow chart of RG-spline algorithm图2 RG-spline算法流程图
3 基于RG-spline的细小裂缝识别算法
本文首先通过RG-spline实现机场道面多方向主轮廓提取与融合,然后使用最大类间方差法获取道面候选裂缝,最后使用形态学方法进行去噪和连接断开裂缝,获得完整裂缝识别结果。细小裂缝识别算法流程如图3所示。
Figure 3 Flow chart of fine crack detection algorithm图3 细小裂缝识别算法流程
3.1 基于RG-spline的多方向道面主轮廓提取与融合
当断面扫描方向和裂缝走势相近或检测平台剧烈震动时,断面中异常数据过多,导致此部位基于该方向拟合的道面主轮廓严重偏离整体走势。因此,本文使用RG-spline算法从多方向拟合道面主轮廓,并针对每个数据点p(i,j)选取其中的最大值作为最优道面主轮廓拟合结果,实现多方向道面主轮廓融合,(i,j)表示数据点p(i,j)在三维深度数据中的坐标。令l=kπ/h,k=1,2,…,h(h≥2)表示道面主轮廓拟合方向,首先使用RG-spline算法计算点p(i,j)在l方向的拟合值:
(7)

(8)
3.2 候选裂缝获取
得到道面主轮廓融合结果后,通过将原始数据与道面主轮廓做差可获得基于道面主轮廓的深度差值图像。令y(i,j)表示点p(i,j)的原始数据,则深度差值图像M中像素值为:
(9)
深度差值图像中包含路面纹理带来的大量深度数据,这些数据与裂缝的深度相比具有明显的差距。因此,本文采用最大类间方差法(Otsu)选取自适应阈值分离深度差值图像中的纹理数据,获取候选裂缝像素。Otsu阈值计算方法如式(10)和式(11)所示:
g=w0×w1×(u0-u1)2
(10)
b=argmax(g)
(11)
其中,w0和w1分别为阈值为b时前景像素个数占全图的比例和背景像素个数占全图的比例,u0和u1分别为阈值为b时前景像素的平均灰度值和背景像素的平均灰度值。选择使类间方差g最大的b作为分割阈值,对差值图像使用b进行二值化分割,得到候选裂缝像素。
3.3 形态学裂缝去噪和裂缝连接
少量纹理或噪声也具有和裂缝相似的深度值,因此候选裂缝图像中还包含有少量噪声,且部分裂缝存在断开现象。为获得更精确的裂缝识别结果,本文首先采用形态学方法中的开操作对候选裂缝图像进行去噪处理,过滤其中的噪声像素;然后使用形态学闭操作,将断开的裂缝连接起来,形成完整的裂缝。令待处理图像为A,se为结构元,开操作和闭操作分别定义如下:
A∘se=(A⊖se)⊕se
(12)
A·se=(A⊕se)⊖se
(13)
其中,⊕表示用结构元se对A进行膨胀,⊖表示用结构元se对A进行腐蚀。结构元的尺寸需根据噪声大小和裂缝断开距离进行选择,尺寸过小会导致噪声去除不干净、断开的裂缝无法完全连接;尺寸过大会将部分裂缝识别为噪声去除且导致相近的裂缝错误连接。本文经过多次实验,在开操作和闭操作中皆选择13×13大小的结构元时得到最优识别结果。
4 实验与分析
本文使用Matlab编程实现RG-spline算法,并在Intel Core i7-6700 CPU(3.4 GHz),16 GB内存,Windows 10操作系统的平台上完成验证。
4.1 道面三维深度数据采集
本文使用的深度相机为德国AT相机(C2-2040HS-GIGE),Computar镜头(M1214),Osela激光器(ILS-670-1000-S-A-75°),并搭建在成都圭目机器人有限公司提供的高精度巡检机器人上(移动速度为30 km/h),进行成都双流机场道面真实三维深度数据的采集,图像分辨率为1984*2000,共得到316幅图像。在实际场景中,机场道面维护工作包括裂缝识别及相邻板块间接缝的异常评估,因此本文将接缝视为特殊的裂缝。该数据集中219幅图像含有接缝,97幅图像含有裂缝,且图像包含异常数据点(如凸起、板块错台、修补等)和检测平台震动等多种噪声信息干扰,具有一定的代表性。为了更加客观地评价算法的性能,对图像中的裂缝和接缝进行像素级人工标注,考虑到人工标注存在一定的标注误差,因此在评估时,若检测结果中的裂缝点到人工标注裂缝之间的距离小于3个像素,则认为该裂缝点为True Positive。
4.2 主轮廓提取对比实验
为客观评价道面主轮廓提取的有效性,将RG-spline算法分别与文献[17]的平面拟合算法、文献[18]的直线拟合算法和文献[19]的断面主轮廓频率信号截取算法进行对比。其中,文献[19]中截取的低频信号范围为0~FL,此处采用使其拟合效果最好的截止频率FL=0.02×FH(FH为最大频谱范围值)。
图4展示了各算法提取的主轮廓与道面深度数据的断面匹配程度,灰色线条为实际道面断面起伏走势,黑色线条为各算法提取的主轮廓横断面。由此可看出:平面拟合和直线拟合算法因自由度较差,其主轮廓与实际数据之间相差过大,文献[19]算法与RG-spline算法可获得整体较贴合道面走势的拟合结果,但部分局部位置(如横坐标为300,500附近处)RG-spline算法较文献[19]算法能获得更吻合真实道面的结果。在横坐标为1 000~1 500区域内,三维数据存在严重局部波动,RG-spline算法与文献[19]算法均获得了较平滑的拟合结果,但RG-spline在拟合精度和平滑度间平衡性更高。图4中横坐标为1 000,1 350处存在2条裂缝,文献[19]算法获得的主轮廓受裂缝干扰,局部略偏离整体走势,导致裂缝深度信息有所偏差。
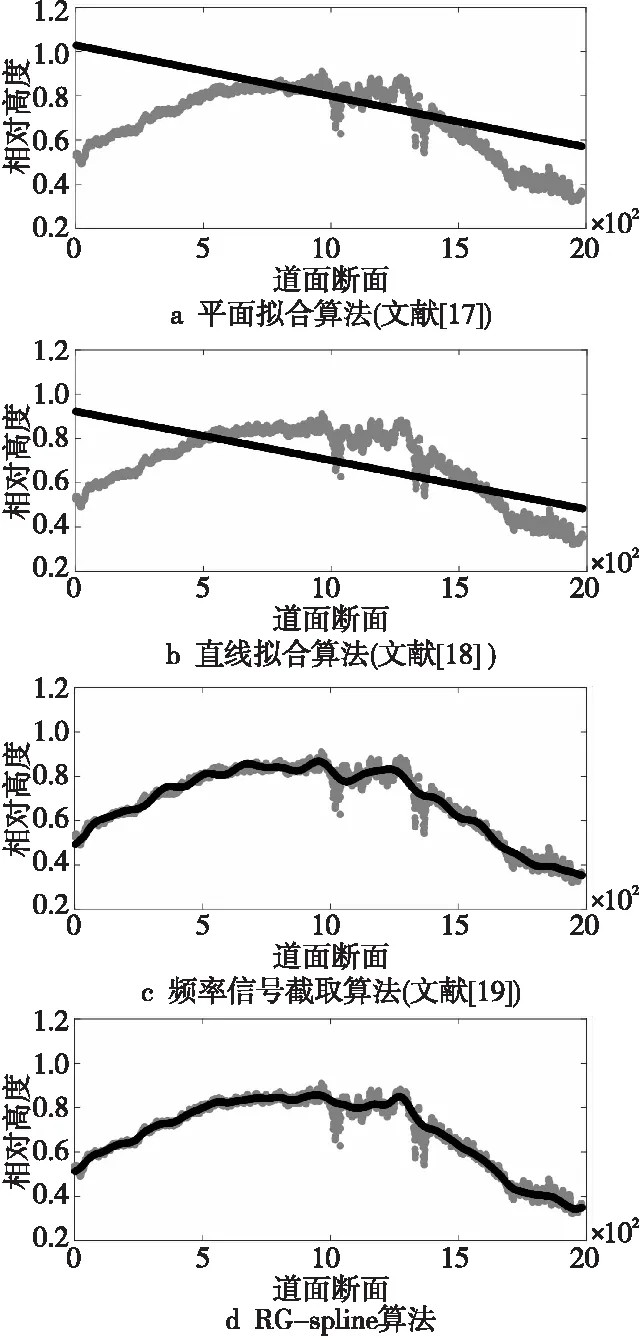
Figure 4 Main profile extraction results of each algorithm图4 各算法提取的主轮廓结果
为进一步展示各算法主轮廓提取准确度对裂缝识别的影响,在上述对比算法提取的道面主轮廓基础上,均使用3.2、3.3节算法作为后续裂缝识别算法进行对比实验,其结果如图5所示。从图5中可看出,平面拟合算法和直线拟合算法提取的主轮廓与实际路面存在严重失真,因此裂缝识别结果中存在部分漏检与大面积的错检。基于频率信号截取的主轮廓提取算法由于部分区域与路面存在偏差,出现一定的漏检现象。因此,RG-spline算法可获得匹配度更高的主轮廓提取结果,更有利于细小裂缝识别及其相关参数计算。

Figure 5 Comparison of crack detection results图5 裂缝识别结果对比
4.3 道面细小裂缝识别对比实验
为客观评价本文提出的细小裂缝识别算法对机场道面细小裂缝识别的有效性,将其分别与CrackForest[4]、Canny经典边缘检测算法、目前最新的裂缝检测神经网络DeepCrack[7]和文献[17]算法进行对比。为了使用Canny算法、DeepCrack算法和CrackForest算法,此处将数据集图像的深度值通过归一化转换为灰度值。

Figure 6 Examples of crack detection results图6 部分识别结果展示
为更直观地体现各算法的识别结果,选取部分典型裂缝类型进行展示(如图6所示),其中包括裂缝细小(如图6c和图6d所示)和局部凸起(如图6f所示)、板块错台(如图6b所示)、数据采集平台震动(如图6e和图6f所示)等多种噪声信息干扰。Canny算法主要通过计算梯度幅值和方向参数实现边缘的精确定位,因此当裂缝边缘有明显的梯度突变时算法识别效果较好,但由于部分裂缝和接缝内部梯度变化较小,其识别结果中的裂缝和接缝内部均为中空(如图6a和图6d所示)。此外,图6b和图6c中的裂缝边缘梯度差较小,导致Canny算法基本失效。 CrackForest算法通过裂缝结构特征的学习获得了较好的识别结果,但若训练集未包含待识别裂缝的边缘及灰度特征时,识别结果将受到影响,导致检测到的接缝内部中空(如图6a所示)和部分漏检的现象(如图6c所示)。文献[17]算法通过平面模型的构建和三维数据点位置的判断实现裂缝识别。由图4可知,真实道面近似为整体曲率半径较大、局部波动不规则的曲面,导致平面模型无法贴合道面起伏走势,出现大面积的错检及漏检。DeepCrack算法采用融合不同尺度裂缝特征的方式有效地改善了裂缝的识别效果,在强干扰下(如图6e和图6f所示)也能较好地识别裂缝,但是在部分裂缝位置依然存在一定的漏检(如图6f所示)。而本文算法可自由拟合道面主轮廓,从而更好地分割裂缝,即使对于细小且边缘特征不明显的裂缝(如图6c所示),算法依然获得较精确的识别结果。
本文采用精确率-召回率(Precision-Recall)指标进行性能评估,从而更加全面评估各算法识别结果的有效性和准确性。其计算方法如式(14)~式(16)所示:
P=TP/(TP+FP)
(14)
R=TP/(TP+FN)
(15)
F=2*P*R/(P+R)
(16)
其中,TP表示正确识别为裂缝的像素总数,FP表示错误识别为裂缝的像素总数,FN表示错误识别为地面的像素总数。
根据定义可知,P(Precision)反映了裂缝识别的精确性;R(Recall)反映了裂缝识别的完整性;F(F-Measure)反映了裂缝识别结果的综合性能。表1为各算法在本文数据集上的精确率、召回率、F值和计算时间4个指标上的均值,分别用MP、MR、MF和MT表示。其中,DeepCrack算法使用11 GB显存的NVIDIA GeForce GTX1080ti显卡进行加速,其余对比算法测试平台配置皆与本文算法测试平台相同。本文算法在道面主轮廓提取时需要对每个点进行多次计算,产生了较大的计算开销,因此检测耗时偏高。在实际场景中,可通过如改变程序语言、提升硬件平台或采用并行计算等方式,进一步减少算法的计算时间。

Table 1 Mean values of crack detection results
结合表1可看出,本文算法在精确率、召回率和F值3个指标上均值高于其他算法。其中,在精确率上CrackForest算法虽有较好的表现,但由于该算法易受测试数据中裂缝特征不完备的影响,其召回率低于本文算法的,因此其综合评价指标F值表现不佳。Canny算法识别结果中裂缝和接缝内部中空,导致其召回率较低。文献[17]算法拟合的平面模型自由度差,与道面主轮廓的吻合度低,导致识别效果不理想,且无法避免将大面积道面识别为裂缝,进一步降低了精确率。DeepCrack算法在3个指标上均有良好的表现,但该算法检测结果易受到训练数据影响,在部分裂缝位置存在一定的漏检,导致其F值指标略低于本文算法的。
此外, 同一算法对不同形态裂缝的识别性能存在差异,通过计算以上指标的均值无法全面反映算法的适用性与稳定性。因此,本文使用标准差系数V=σ/x·100%展示各算法识别结果的离散程度,其中,x和σ分别为识别结果在各个指标上的均值和标准差。标准差系数反映了检测结果在各个指标上的离散程度。标准差系数越小,表明算法对数据集中每幅图像的识别结果越相近,即算法识别结果的稳定性越强。
表2展示了各算法识别结果在3个指标上的标准差系数(分别用VP、VR和VF表示)。从中可看出,Canny算法受到识别图像中裂缝面积的影响,导致其召回率上的标准差系数较差;CrackForest算法在3个指标上的标准差系数表现较好,但是受到机场道面情况复杂、部分裂缝特征不明显的影响,其稳定性略低;DeepCrack算法采用深度卷积模型检测裂缝,相比CrackForest算法具有更强的学习能力,因此其稳定性高于CrackForest的;而文献[17]算法识别结果3个指标的标准差系数远高于本文算法的,一定程度上反映了道面主轮廓提取精度对细小裂缝识别稳定性的影响。
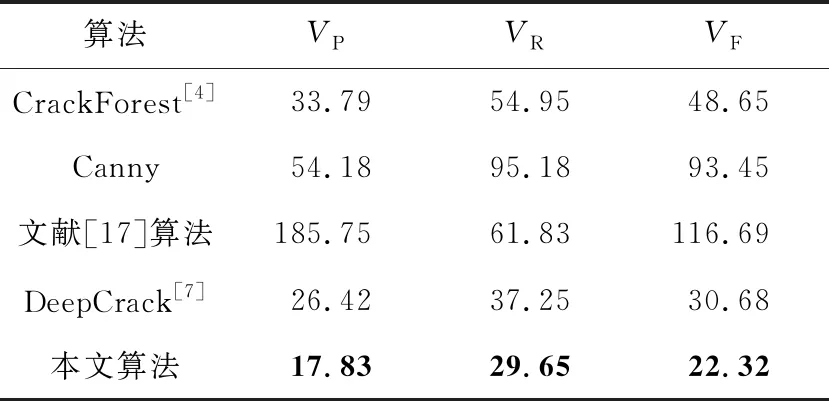
Table 2 Variation coefficient of crack detection results
图7综合展示了各算法的检测性能,其中柱体的高度为指标数据的均值,线段的长度为指标数据的0.2倍标准差,线段长度越短表明算法检测结果的稳定性越强。由图7可知,本文算法在保证F值均值较高的情况下,其标准差最低,因此本文算法可获得稳定性较好且综合性能较高的识别效果。

Figure 7 Histogram error bar of Precision,Recall and F value图7 准确率、召回率、F值柱状图和误差棒图
5 结束语
为满足机场高精度、窄时限、大范围的裂缝自动检测实际需求,针对基于深度相机检测技术面临着道面表观结构复杂和裂缝识别平台剧烈震动的双重强干扰下机场道面细小裂缝检测困难的难题,本文进行了基于三维深度数据的机场道面细小裂缝精确识别算法研究。为了避免三维深度数据中纹理、深度相机裂缝识别平台带来的噪声、异常数据和道面主轮廓相互混叠影响,本文提出了一种结合L2正则化与改进贪心策略的道面主轮廓提取算法(RG-spline),并基于该算法实现了强干扰情况下机场道面细小裂缝的精确提取。在真实机场道面三维数据集上的实验结果表明,本文算法能有效地提高主轮廓提取的精确率,从而获得稳定性较好且综合性能较高的细小裂缝识别效果。该算法为机场道面裂缝的局部精准修护提供了技术支持,能够满足实际检测需求。