论无人驾驶卡车在新疆大南湖露天煤矿应用的可行性
2020-11-28肖明
肖明
摘 要:为提高新疆大南湖露天煤矿卡车运输效率,降低运输环节成本,进一步提升智能化装备水平,通过对露天煤矿现有的卡车运输工况条件进行分析,提出在卡车运输环节采用无人驾驶技术,通过分析无人驾驶卡车的技术特点以及产生的经济效益,结果表明,在新疆大南湖露天煤矿采用无人驾驶卡车技术可行,年节约生产成本约2500万元,经济效益良好,为矿山实现绿色智能化开采提供了选择。
关键词:无人驾驶卡车;大南湖露天煤矿;技术可行性;效益分析;智能高效
中图分类号:P618 文献标识码:A 文章编号:1671-2064(2020)12-0204-02
0 引言
大南湖矿区位于国家大型煤炭基地新疆基地吐哈区东部,是国家“十三五”时期规划的“疆电外送”“疆煤东运”重点煤电基地,大南湖露天煤矿一期设计生产能力6.0Mt/a,规划生产能力20.0Mt/a。地表境界面积37.23km2,可采原煤量1630.81Mt,设计服务年限为140年。目前生产中剥离工艺为单斗-卡车工艺,采煤工艺为单斗-卡车-半移动破碎站-带式输送机半连续工艺,采、运、排工程均采用小型化设备作业,主要的设备规格为5m3液压挖掘机匹配60t宽体卡车,运输卡车达90台,运输工人300人,高频繁的卡车调度和大规模的用工要求给大南湖露天煤矿实现智能高效开采带来了极大的挑战。
无人驾驶技术可有效提高露天矿智能高效开采水平,但作为新型技术性研究成果,面对露天矿上封闭、复杂的交通状况以及经济效益先导的考核,在其正式广泛应用前必须展开严格的可行性分析,以实现预期的应用目标。为此,从技术和经济层面探究大南湖露天煤矿无人驾驶卡车的运用可行性有着重要的现实意义。
1 矿山运输现状与存在问题
1.1 运输现状
大南湖露天煤矿采剥工程目前采用外包运营模式,采矿设备按照小型化装备水平配置,主要采矿设备已有22台4m3液压挖掘机及90台60t自卸卡车,辅助采矿设备13台。剥离与采煤台阶全部采用水平划分,台阶高度为10m,排土台阶高度为20m。目前露天煤矿形成了原煤运输及剥离运输两套开拓运输系统。原煤由60t卡车经工作帮移动坡道、采场北帮运输平盘及出入沟运往地面破碎站进行破碎;剥离物由60t卡车经工作帮移动坡道、采场南部出入沟、排土场排土运输坡道运往排土场排弃。
1.2 存在问题
大南湖露天煤矿地处西北戈壁荒漠,人烟稀少,工作环境极为恶劣,矿山生产时常由于极端天气停工停产。目前存在着如下问题制约着本矿实现智能高效开采:首先,由于采用小型化设备,需聘请大量经验丰富的专业驾驶人员进行操作,面对当前人力资源成本不断攀升、地理位置偏远且招工难的问题,加大了本矿生产用工风险;其次,采掘场及排土场车多人多,为运输调度、生产管理带来了挑战,存在着较大的安全风险;最后,由于气候恶劣且矿山运输道路条件不佳,加剧了运输环节中柴油及轮胎的消耗成本。
2 无人驾驶技术应用
2.1 无人驾驶技术发展现状
无人驾驶技术一直是国内外探究的热门话题,日、美对于矿山无人驾驶技术的研究走在了世界前列。其中日本早在20世纪80年代就开始在礦山作业中尝试应用无人驾驶技术,步入到21世纪后,日本小松公司尝试将无人驾驶运输系统运用到智利铜矿当中,历经3年,全面完成无人驾驶运输系统的部署,成为全世界范围内无人驾驶在采矿领域的首次尝试,取得成功[1]。在小松公司的推动下,无人驾驶卡车在采矿领域已逐步实现大规模商业化应用。
同样在20世纪80年代,美国也开展了无人驾驶技术应用研究,其中卡特彼勒公司开发了MineStar矿上无人作业体系,其以地理信息、自动控制、健康监测、车队管理等技术为核心,形成了无人作业体系化研究,实现对运载车辆的自动化控制,目前该系统已成功运用到美国6家采矿企业,其中150多台设备已实现运载矿岩超过10亿t的任务量[2]。
中国在无人驾驶技术上的研究起步较晚,近年来,以慧拓智能、踏歌智行等一批互联网科技公司为代表,正全力研发矿山无人驾驶技术,目前已取得了突破性的成果,但研究成果还处于测试阶段,待大规模投入市场。
2.2 无人驾驶技术在大南湖露天煤矿的应用
无人驾驶卡车在新疆大南湖露天煤矿中运用,主要任务是按照固定线路进行原煤及剥离物运输,主要应用于自动排卸、自动避障、倒车入位、重载爬坡、精准停靠、挖机装载等场景。与公路上驾驶车辆不同,煤矿中运输具有特殊性,其需要保障运输的精准性与可靠性,因而,无人驾驶卡车系统根据煤矿运输的场景以及工作目标,构建起以环境感知、动力学控制、高精度地图绘制、作业场景描述为基础的多学科交叉复合技术系统,为卡车的稳定、安全运行提供了可靠的技术支持[3]。
2.2.1 环境感知技术
环境感知技术是指利用相机、毫米波雷达、激光雷达等精密的测距、传感装置感知与检测周围环境,精准识别障碍物,并通过对环境内多目标的追踪对卡车行驶环境进行全面解读,为无人驾驶提供可靠的依据[4]。面对着大南湖露天煤矿开采面积大、矿区内沙尘严重影响着传感器的感知能力,矿山道路等级低、质量差、车辆行驶中时常颠簸对环境感知系统的抗扰动能力要求严格,新疆天气条件恶劣、昼夜温差大对于环境感知系统部件性能考验。通过多功能环境传感器优化配置与之适应。
2.2.2 动力学控制技术
无人驾驶卡车得以在露天矿山平稳运行,要求其能够在任何场景下始终保持稳定的自适应能力,并主动做好平衡性控制,安全、可靠地完成既定的技术动作,基于动力学原理的控制技术可实现卡车的横纵向控制[5]。
2.2.3 高精度地图绘制技术
采用高精度地图绘制技术,可实现精度在1m、相对精度在10cm~20cm之间的地图绘制,从而可更加精细与真实地反映道路情况,该项技术借助高精度坐标绘制更完整、更准确的道路形状,并添加道路高程、坡度等数据对道路状况进行详细描述。此外,通过技术手段降低地图数据传输的延迟,可为卡车连续作业提供可靠保障[6]。
2.2.4工作场景描述技术
矿区作业场景分为正常、非正常、紧急三种场景,正常场景则为无任何障碍及意外下展开作业;非正常则是矿区内有作业或障碍需要卡车避让,并会对卡车自主装卸等产生影响;紧急场景是指对于卡车运行有较大安全威胁、危害的场景[7]。结合不同场景情况以及所带来的危害提前制定应急预案,输入到控制系统中,以便卡车作业中精准判断环境。
3 技术优势
无人驾驶技术在矿山运输中的应用具有极为突出的优势,首先,节省了聘用驾驶司机以及辅助人员的人力资源成本,且规避了运载车辆驾驶中人为因素的干扰,减少因驾驶人员不良习惯造成的车辆损伤以及人员损伤;其次,随着无人驾驶技术发展水平的提升,目前可实现对无人驾驶卡车自动化与智能化控制,配合GPS定位、智能控制系统的应用,实现了车辆与控制系统远程传输信息,大大提高整体的协调作业效率,延长运载设备的使用寿命;最后,无人驾驶卡车的成功运用,将减少矿山作业对人力资源的依赖,大大提升作业的机械化程度,国际知名矿业企业力拓集团曾统计过3年期间运载设备使用及效益情况,据统计结果显示,无人驾驶卡车的应用使运载车辆工作效率提高了21%,成本节约近15%,且无人驾驶卡车的应用可因提高工作效率减少能源消耗,带来显著的生态效益,符合可持续发展理念[8]。
结合国内科技公司现阶段研究的无人驾驶卡车运行系统技术,尤其是在露天矿山中环境感知、动力学控制、高精度地图绘制、作业场景等技术创新成果,其为矿山实现智能高效开采提供了可靠的技术支撑。目前国内有关露天矿引进无人驾驶试验系统后,经过较长时间的试验实践,基本都达到了预期目标,所以说无人驾驶卡车技术可行。
4 效益分析
通过经济与生态效益两个方面,对传统卡车技术与无人驾驶技术进行对比,以探究无人驾驶卡车在大南湖露天煤矿运用的合理性。
4.1 经济效益分析
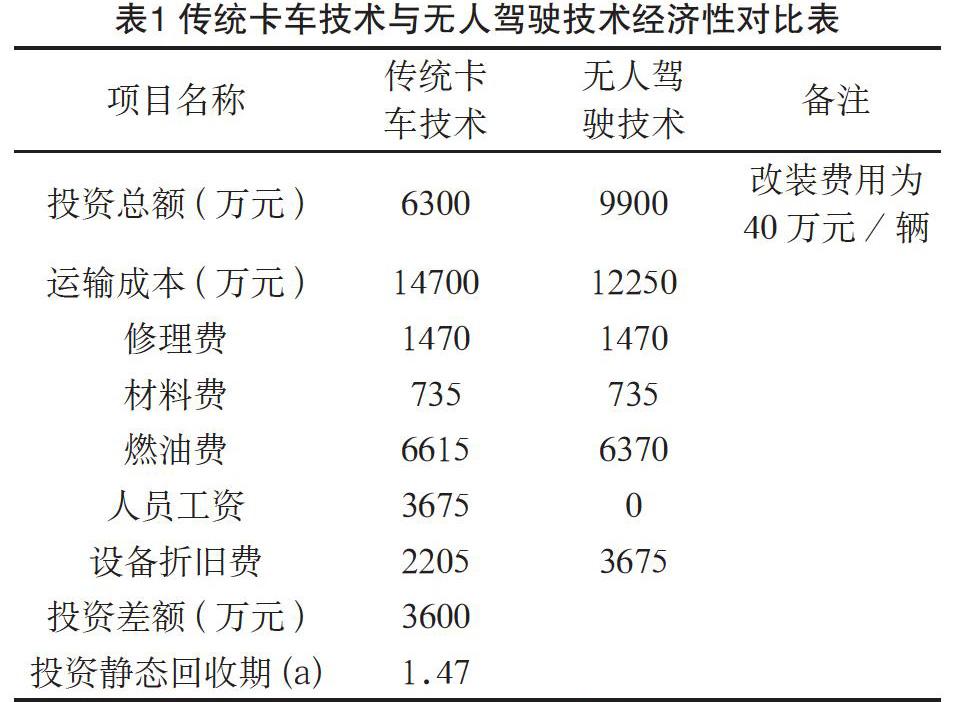
目前大南湖露天煤矿运输卡车均采用60t国产宽体卡车,卡车数量90台,按照70万元/辆的市场价计算,卡车总投资额为6300万元。
采用无人驾驶的宽体卡车可节省运输环节中人员工资,并通过无人驾驶系统的优化,可适当降低燃油消耗,另外,考虑无人驾驶卡车更高的投资额,一定程度上提高了生产成本中设备折旧费,两种技术的经济性对比结果见表1。
结合表1计算结果,无人驾驶技术投资额较传统卡车技术高3600万元,但由于运营成本低,年节省生产成本约2500万元,投资差额静态回收期仅为1.47年,表明无人驾驶技术经济效益良好。
4.2 生态效益分析
结合国外运行实践,以及国内科技公司的研究成果,无人驾驶卡车控制系统通过对卡车路径优化、运行状态改善等系统性规划,可有效降低露天煤矿运输系统的能耗,生产人员的减少进一步改善了从业者的工作环境,总之,生态效益十分可观。
5 结语
在大南湖露天煤矿卡车运输环节运用无人驾驶技术,技术及效益层面都具有可行性,技术上能够保障无人驾驶卡车的稳定与安全,经济上能够为企业创造更丰厚的利润,且符合绿色开采、智慧化开采理念,为大南湖露天煤矿实现智能高效开采提供了选择。
参考文献
[1] 白怡明.西湾露天煤矿110t大型矿山卡车无人驾驶系统关键技术[J].露天采矿技术,2020,35(1):29-32.
[2] 新疆天池能源有限责任公司.露天煤矿无人驾驶卡车智能车载终端方向调节减震支架:CN201920633166.5[P].2020-02-07.
[3] 新疆天池能源有限责任公司.一种露天煤矿无人驾驶系统手持指挥终端外结构:CN201920633168.4[P].2020-02-07.
[4] 周菲鑫.煤矿井下无人驾驶电机车定位系统研究[J].数字化用户,2018,24(51):223+225.
[5] 武学宏.矿井机车无人驾驶系统的研究[J].山东煤炭科技,2019(8):213-214+217.
[6] 周菲鑫.煤礦井下电机车无人驾驶测控系统研究[D].淮南:安徽理工大学,2019.
[7] 厦门大学嘉庚学院.一种煤矿井下无人驾驶无轨胶轮车控制系统:CN201820047087.1[P].2018-09-04.
[8]丁震,孟峰.矿用无人卡车国内外研究现状及关键技术[J].中国煤炭,2020,46(2):42-49.
