配电环网柜操作机器人设计与控制方法研究
2020-11-27赵法强刘颖张智宏李昭远
赵法强,刘颖,张智宏,李昭远
(1.深圳供电局有限公司,广东 深圳 518122;2.北京航空航天大学 仪器科学与光电工程学院,北京 100191)
配电环网柜[1]是供电系统中不可或缺的部分,其核心部分采用负荷开关和熔断器。相对于变电站内开关,外网中环网柜具有种类繁多[2]、灭弧方式各异、防护质量参差不齐、服役时间长、运行环境恶劣、潮湿环境放电、操作空间狭窄等安全隐患。随着电压的增加,环网柜合环转电过程对操作人员存在极大的人身威胁。针对环网柜的安全隐患,许多学者从防护等级[3]、灭弧方式[4]、绝缘保护[5]等角度出发提高环网柜的操作安全性能,但对配电环网柜的使用和维修还停留在人工阶段,国内外环网柜操作爆炸的事件常有发生,威胁操作人员安全。为解决环网柜维护[6-7]和作业过程中操作安全问题,采用带有双关节机械手的配电环网柜电气操作机器人代替人工操作,可使环网柜的操作更加智能、安全、高效。
机械手的控制[8-10]对于操作机器人的应用十分关键,在整个设计结构中,机械手固定在设计结构的主体上,根据不同的操作孔径更换相应的操作头后,弹操结构的扭力电动机旋转对准操作孔的操作杆完成环网柜的切换电作业。机械手的末端执行机构的初始位置和最终位置固定已知,机械手的运动具有高度重复的特点,适合迭代学习控制[11](iterative learning control,ILC)算法。ILC算法是在重复过程中通过误差信息不断迭代修正控制效果,可在短时间内实现对未知对象运行轨迹的高精度跟踪以进行拟合控制,不需要明确的数学模型。该方法自1984年Arimote等人[12]提出以来,吸引了国内外学者的广泛研究。ILC[13-14]的技术关键点主要有收敛性[15]、稳定性[16]、收敛速度[17]、学习律设计问题[18],常规的ILC算法适用于简单的控制系统,许多学者致力于收敛性与收敛速度以及学习律设计的优化研究,以提高ILC算法的性能与应用范围。杨红[19]将遗忘因子引入PD型ILC算法中,改进了收敛条件,通过仿真得出其算法的误差跟踪性能得到提高,误差迭代曲线更平滑,但在收敛次数和速度上没有明显的优势。曹伟[20]等人设计出闭环指数变增益的ILC学习律,放宽了收敛条件,同时也放松了对初始状态函数的要求,提高了ILC算法的收敛速度,但收敛速度过快极易导致系统不稳定问题出现。
本文根据遗忘因子能减弱前一次迭代数据对当前迭代的影响程度,保证算法收敛到零点附近的一个领域内和变增益[21]能提高算法收敛性等特点,提出一种基于参数优化的D型ILC算法,旨在结合遗忘因子和变增益学习律在ILC算法中的优势,提高算法的收敛速度及收敛速度过快时系统的稳定性,解决变增益学习律增益参数选取困难的问题,提升迭代学习的算法性能;同时,本文针对配电环网柜的操作安全隐患,进行电气环网柜操作机器人的设计,介绍了操作机器人的整体方案与设计关键点,为实现对机器人机械手的精确控制,提出基于参数优化的D型ILC算法,给出了基于参数优化的ILC算法的控制律,对收敛条件和收敛性作出了解析和证明;最后通过电气环网柜操作机器人双关节机械手的MATLAB仿真控制来验证本文的所提算法的优势。
1 操作机器人的设计
1.1 整体设计内容
机器人设计主要部分为电气控制、伸缩支架、电源、遥控、机械手等。电气控制部分控制整个操作过程中动力电动机的转动、停止;伸缩支架是将机器人的主体结构固定在配电柜上;电源部分实现对弹操结构和机械手的供电;遥控部分对机器人进行远程无线遥控,实现弹操结构和机械手的横向移动,使其对准环网柜的操作孔。电气控制部分的主控芯片是STM32F103RBT6,减速电动机是工业用12 V无刷直流电动机,减速到60 r/min,同时采用步进电动机外置减速装置。伸缩支架由长度50 cm、直径30 mm和26 mm的碳纤维管及转接头和螺纹连接头等构成,安装固定在配电柜上。机械手根据不同的操作孔类型自动更换操作头,再将操作头对准操作孔后,利用电动机扭力扭转操作头,完成电气作业。摇控信号接收模块使用NRF2401,与主控制部分通信。电源部分的设计结合了芯片的工作电压、弹操结构的供电电压与机械手输入输出电压。操作机器人的设计结构如图1所示。
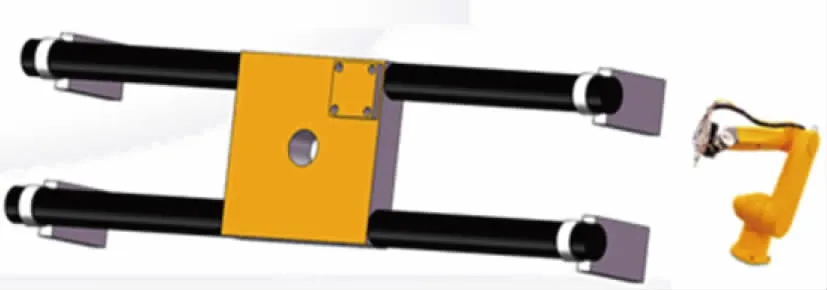
图1 操作机器人的设计模型Fig.1 Design model of the operating robot
1.2 关键点的设计
1.2.1 扭力控制电路设计
扭力控制是检测电动机供电电桥的对地的电流,如图2所示。图2中,电阻R3上的电流就是电动机的工作电流,设备在生产测试时用专用的扭力计来检测力度,同时检测R3电压值,计算出电流的大小。在使用中如果电流值突然增大,那么电动机就有损坏的可能,还可能损坏控制电路。主控芯片的模数转换(analog to digital converter,ADC)高速检测,能在最短的时间内检测到电流值的变化,同时停止电动机的转动。

图2 减速电动机控制电路Fig.2 Control circuit of gear motor
1.2.2 遥控接收部分设计
摇控接收装置采用1个NRF2401的模块,如图3所示。NRF2401是一款新型单片射频收发模块,工作于2.4 ~2.5 GHz 频段,内置频率合成器、功率放大器、晶体振荡器、调制器等功能模块,并融合了增强型技术,其中输出功率和通信频道可通过程序进行配置。NRF2401功耗低,在以-6 dBm的功率发射信号时,工作电流只有12.3 mA;接收信号时,工作电流只有9 mA。NRF2401具有多种低功率工作模式,工作在100 MW时电流为160 mA,且可以实现远距离数据传输。模块主控单片机连接是SPI串行接口,其最高通信速率可以达到10 MB/s。

图3 遥控器接收控制Fig.3 Receiving control of remote control
1.2.3 机械手的控制部分
设计的机械手固定在整个操作机器人的主体结构上,与弹操结构一起在伸缩支架上横向移动,完成操作头的更换与切换电等电器作业。机械手的控制方法一般分为点控制和连续轨迹控制。点控制方法仅控制起点和终点的姿势,机械手在两点之间的运动轨迹没有规定,易于实现但控制精度不高;连续轨迹控制是以连续轨迹模式,沿设定的任何空间曲线运动,控制2个以上的运动轴,很好地切合项目双关节机械手的ILC。控制系统的工作方式可分为手动和自动2种模式,设计中可设定手动单步的工作模式,采用远程客户端APP与机械手进行通信完成电气操作。为选取合适的控制方法实现对机械手的精确控制,本文对ILC算法进行深入研究,利用MATALB的Simulink对机械手进行仿真建模,探究和验证提高ILC算法的性能和效率。
2 机械手的控制
2.1 基于参数优化的D型ILC算法原理
迭代控制的目标是指设定的输出yd(t)与初始状态xk(0)之间,在给定的时间t∈[0,T]内,按照一定的学习控制规律通过多次重复的运行,使控制系统的输入uk(t)趋于设定的输入ud(t),控制系统的输出yk(t)趋于yd(t)。Arimoto等人首先给出D型ILC学习律,算法基本结构如图4所示。图中uk(t)为输入信号;yk(t)为输出信号;uk+1(t)为修正后的输入信号,k为系统迭代次数,在[0,T]范围内k=0,1,2,…,n。迭代控制系统的输出误差

图4 迭代学习基本结构Fig.4 Basic structure diagram of iterative learning
ek(t)=yd(t)-yk(t).
(1)
学习方式可分为开环学习和闭环学习2种,其中将第k+1次的控制输入作为第k次控制输入与第k次输出误差的校正项为开环学习,即
(2)
闭环学习控制算法是取第k+1次运行的误差作为学习的修正项,即
(3)
2.2 参数优化ILC算法
设被控对象的动态特性过程为:
(4)
式中:x(t)为被控对象的动态特性矩阵;f为被控对象的动态特性矩阵函数;xk(t)为被控对象第k次迭代的状态矩阵;B(t)为输入系统增益矩阵;C(t)为状态增益系统矩阵。
为加快ILC算法收敛速度引入变增益学习矩阵,同时为克制因收敛速度过快而系统跟踪误差波动缺点,在D型ILC算法中引入遗忘因子和学习矩阵,即
uk+1(t)=(1-r(k))uk(t)+

(5)
式中:r(k)为遗忘因子,且为迭代次数k的函数;L为学习律的增益矢量;uk,0(t)为初始输入在第k次迭代的剩余控制,且uk+1,0(t)=r(k)uk,0(t)。误差形式变化为增量形式
uk+1(t)-uk(t)=r(k)U(t)+
αk+1(t)DΔek(t+1).
(6)
式中:U(t)=uk,0(t)-uk(t);L=αk+1(t)D,D为增益矢量且为正定矩阵;Δek(t+1)=ek(t+1)-ek-1(t-1)为误差增量变化;αk+1(t)为增益矢量。在式(5)中遗忘因子r(k)和增益矢量αk+1(t)对算法的收敛性、收敛速度等有很大的影响,故需要利用参数优化方法[21]对参数进行优化求解。
2.3 参数优化函数
由式(6)设计参数优化函数
Jk+1(r(k),αk+1(t))=
argmin(Jk+1(r(k),βk+1(t))).
(7)
式中βk+1(t)为优化增益函数矩阵。目标优化函数Jk+1为
Jk+1(r(k),αk+1(t))=‖ek+1(t+1)‖2+

(8)
式中:w1和w2为参数加权系数,加入‖ek+1(t+1)‖2是为了确保系统误差的最小化,而加入遗忘因子r(k)和增益矢量αk+1(t)是为保证最适系统输入增量变化。
由式(1)得
ek+1(t)=yd(t)-yk+1(t)=
yd(t)-yk(t)+yk(t)-yk+1(t)=
ek(t)-(yk+1(t)-yk(t)).
(9)
将式(6)代入式(9)得
ek+1(t)=ek(t)-G(r(k)U(t)+
αk+1(t)DΔek(t+1)).
(10)
式中G(t)为系统输入输出算子,且
G(t)=

‖ek+1(t)‖2=
‖ek(t)-G(r(k)U(t)+αk+1(t)DΔek(t+1))‖2=
‖ek(t)‖2+‖G(r(k)U(t)+αk+1(t)DΔek(t+1))‖2-
2〈ek(t),G(r(k)U(t)+αk+1(t)DΔek(t+1))〉=
‖ek(t)‖2+r2(k)‖GU(t)‖2+
2r(k)αk+1(t)〈GU(t),GDΔek(t+1)〉-
2r(k)〈ek(t),GU(t)〉-
2αk+1(t)〈ek(t),GDΔek(t+1)〉.
(11)

(12)
由式(8)优化函数可知
(13)
系统跟踪误差ek+1(t)单调递减。根据式(11)递推和优化函数关系可知
(14)
2.4 收敛性分析
在基于参数优化的改进型ILC算法中,结合变增益与遗忘因子的优点,引入遗忘因子r(k)和可变增益α(t),则算法的学习律
(15)
定理:
式(4)中,假设在时间区间内的任意时刻存在对应于控制输入ud(t)的期望输出yd(t),即
(16)
则必须满足如下条件:

(17)

证明:
根据学习律式(15),将式(4)中第k+1次的迭代控制输入误差表示为
(18)
其中Δuk(t)=ud(t)-uk(t)。结合式(16),此时系统迭代误差

(19)
式中:xk(t)为被控对象的第k次迭代的动态特性矩阵;xd(t)为被控对象的期望动态特性矩阵。将式(19)简化为
(20)
将式(19)两边同时求导,由变上限积分求导公式得
(21)
将式(21)代入式(18)中得

(22)
式中:M=(1-r(k))I-α(t)LC(t)B(t);N=α(t)LC(t)A(t)。对式 (22)等式两边同时取范数得

(23)
两边同乘以e-λt(λ为常数)得

(24)

‖Δuk+1(t)‖λ≤ρ‖Δuk(t)‖λ+r(k)ε,
(25)
当λ取较大值时,系统满足收敛条件式(17),此时可表示为ρ<1,则:
(26)

(27)

3 算法仿真与分析
考虑线性定常系统:

(28)



图5 不同ILC算法对角度q1和角度q2的输出跟踪曲线Fig.5 Output tracking curves of different ILC algorithms to q1 and q2
由图5可知:本文所提算法在限定的迭代时间内,系统输出曲线与期望轨迹曲线基本重合,说明本文所提ILC算法基本能够完全跟踪期望轨迹。
图 6表示各算法在限定的迭代时间内对关节输出的角度和角速度跟踪误差曲线图。

图6 不同ILC算法对关节角度和角速度跟踪误差曲线Fig.6 Tracking error curves of different ILC algorithms to joint angle and angular velocity
由图6可知:系统在本文所提基于参数优化的ILC算法下,学习角度的跟踪误差在限定的迭代时间内能衰减到零附近,角速度的跟踪误差也能衰减到零附近。
图7表示不同算法对关节运动轨迹跟踪误差的收敛曲线。
由图7可知:本文所提算法在收敛速度上更快,收敛过程平稳不震荡,轨迹跟踪误差小,相比于其他2种算法优势较为明显。结合对关节运动角度和位置的跟踪对比,本文所提基于参数优化的ILC相对另2种算法具有更快收敛速度和平稳的收敛过程,能更好实现轨迹的完全跟踪。

图7 各算法迭代15次对关节轨迹跟踪误差收敛曲线Fig.7 Tracking error convergence curves of each algorithm to joint trajectory after 15 iterations
4 结论
本文针对目前配电环网柜操作的安全问题,提出配电环网柜操作机器人的设计方法,介绍了配电环网柜操作机器人设计结构与关键设计要点。为实现对机械手的精密操作,结合机器人的设计和使用特点,采用ILC算法对机械手进行控制。为改善变增益ILC算法收敛速度快而导致的系统跟踪误差波动大的情况,在变增益ILC算法中引入可变遗忘因子,并用参数优化解决增益参数选取问题,并提出基于参数优化的D型ILC算法,通过MATLAB仿真表明,本文算法相比于变增益D型ILC算法和遗忘因子的ILC算法具有更快收敛速度和平稳的收敛过程,能更好实现轨迹的完全跟踪。
在机械臂实际运行过程中可能还会存在外界干扰、自身运动时的震动以及其他时变摩擦等,控制的效果与实验结果会有差别。由于项目开发进度原因,未能在工程实际场景中进行实验验证,而仅通过MATLAB工具进行仿真测试,得到仿真中最优的控制算法,但不失为后续配电环网柜电气操作机器人的设计与控制打下一定基础。
