无人机集群智能的生成样式研究
2020-11-26许瑞明
许瑞明
(军事科学院评估论证研究中心,北京 100091)
0 引言
无人机以其诸多优势已成为战场上的新宠,无人机集群作战已经或即将成为未来的重要作战方式。美军《2016—2036 年小型无人机系统飞行规划》把“蜂群”作战作为小型无人机的4种作战运用方式之一,提出了小型无人机“蜂群”协同作战构想,开发了包括小精灵(Gremlins)、灰山鹑(Perdix)、低成本无人机集群技术(LOCUST)等多个无人机集群作战项目[1-2]。近期无人机集群在叙利亚战争、也门战争中的表现已反映出无人机集群作战所具有的充分潜力。
智能技术是包括无人机在内的各类无人系统的重要技术支撑,无人机及其集群能自主判断、决策和行动,靠的是智能的支持。目前,集群智能研究已成为学界的一大热门研究领域,研究成果不胜枚举。但对于无人机集群来讲,其智能的生成模式及其应用实现途径等智能生成样式问题还缺乏联系实际的探索和系统归纳,该问题的回答可为无人机集群未来作战的力量编成、作战运用设计提供基础支撑,也可为无人机集群智能生成技术研发提供需求指引。
1 无人机集群智能的生成模式
无人机集群是由多个无人机组成的空中无人机集群及其地面站共同形成的完成特定任务的有机整体。集群中的无人机可以是同构的,也可以是异构的;集群中的无人机数量少可以数架,多可以成百上千架。
无人机集群是一种物理表象,其智能的生成有2种:一种是群体智能的涌现性体现,如群体内部的自洽或自治;另一种是由更高的智能体赋予,如人的干预、地面或集群内部的中心节点干预等。
关于群体智能的涌现性体现,较早的研究来自对自然界中蜜蜂、蚂蚁等昆虫群体行为的观察。这些昆虫个体的智能并不高,看起来并没有集中的指挥,但它们却能协同工作,依靠群体的能力,发挥出超出个体的宏观层面上的智能,这种生物通过协作表现出的宏观智能行为特征被称为群体智能(swarm intelligence)[3-5]。国内外学者借鉴各类生物群体智能涌现机理开发了一系列群体智能优化算法,成果颇丰。自1991年开始,国内外学者相继提出了蚁群优化算法、粒子群优化算法、人工蜂群算法、人工鱼群算法、狼群算法等群体智能优化算法,并持续加以改进[6-7]。
从智能生成主体视角看,群体智能的涌现性体现可归类于分布式智能生成,由更高的智能体赋予智能可归类于集中式智能生成。参考分布式智能的多Agent系统和分布式问题求解两大研究方向[8],可将群体智能的涌现性体现区分为仿生行为式智能生成和功能分布式智能生成2种生成模式。仿生行为式智能生成是指无人机个体直接模仿生物个体简单智能行为,通过无人机个体间交互涌现出无人机集群整体层次智能的一种模式。功能分布式智能生成是指把智能生成任务分解为多个子任务赋予各个无人机个体,通过协同求解生成集群智能的一种模式。概括起来,无人机集群智能的生成模式可区分为集中式、仿生行为式和功能分布式3种。
智能生成还有一种理解是通过大量样本训练提升任务的完成能力,本文并未涉及这一范畴,主要有2点考虑:一是该范畴研究视角与本文不同;二是该范畴内容极其丰富,需要专门撰文研究分析。
2 集中式智能生成的应用实现途径
对于无人机集群来讲,集中式智能生成主要应用于战前的任务规划和战中的任务再规划。
2.1 战前任务规划
智能应用于战前任务规划主要体现在任务分解与调度、任务资源分配、航路规划等几个环节,其应用实现的主体为地面站。
任务分解与调度模糊空间大,应由军事人员和机器协同完成。其中军事人员提供任务分解和调度知识、对机器提供的任务分解和调度方案作修改调整和确认;机器基于任务分解和调度知识,依靠推理工具给出任务分解和调度方案。层次任务网络(hierarchical task network,HTN)是一种基于分层抽象和领域知识的智能规划技术,其主要思想是利用领域知识递归地将复杂抽象的任务进行逐层分解,直到可以通过执行规划动作就能完成的原子任务为止[9]。以层次任务网络为规划器,结合框架等知识表示手段,可有效实现任务分解和调度的有限智能推理。
任务资源分配以机器为主完成,军事人员对机器提供的分配方案作局部调整和最终确认。当任务资源分配问题比较简单时,传统优化方法如线性规划、整数规划等可用于任务资源分配。但在影响因素多、分配关系复杂情况下,传统优化方法往往不够有效。自然计算领域中的大多数方法是任务资源分配的有效方法。自然计算(nature-inspired computation)是各类相关自然科学和计算机科学相互交叉而产生的研究领域。自然计算方法包括进化计算算法、生物启发计算算法、群体智能优化算法等[10-11]。
航路规划应基本以机器为主完成,军事人员对机器提供的航路规划方案作个别调整和最终确认。无人机航路规划是指依据具体任务明确飞行约束条件,寻找从起点到终点的最优或较优的可行航路。优化准则和约束条件与具体任务有关。通常,航路规划选择路线最安全、油耗最少、路线最短、时间最短等其中一个或数个作为优化准则。线路安全需要考虑地形起伏、恶劣天气、障碍物、火力、探测、干扰等威胁因素。约束条件通常包括性能约束和任务约束。性能约束如最高最低飞行高度、最高最低飞行速度、最大偏航角、最大爬升/下降角、最小转弯半径、最小航路段长度等约束。任务约束如禁飞区、时域协同、空域协同、进入任务区方向等约束。航路规划算法多种多样,还没有统一的分类标准。目前公认比较有效的算法是启发式优化算法,主要指自然计算领域中的遗传算法、神经网络算法、蚁群算法、粒子群优化算法、模拟退火法等。
2.2 战中任务再规划
智能应用于战中任务再规划主要体现在任务调整和航路再规划2个环节,其应用实现的主体既可以是地面站,也可以是空中无人机集群中某个担负中心节点角色的无人机。
任务调整和航路再规划除了可采用战前任务规划所用智能算法外,在地面站还可采用平行系统方法实现智能效果。
平行系统方法是一种新颖的辅助决策方法,它构建与现实系统对应的一个或多个虚拟或理想的人工系统,将实际系统与人工系统相互连接,对二者之间的行为进行对比和分析,完成对各自未来的状况的“借鉴”和“预估”,完成对实际系统的管理与控制[12]。以平行系统理论为指导,中山大学陈龙等专家提出了平行无人系统的概念和框架,对平行无人系统的建模、平行学习、平行规划、平行控制等关键技术进行了研究,并设计了平行驾驶验证平台和平行机器人验证平台,验证了平行无人系统框架的可行性[13]。
借鉴平行系统思想,参考平行无人系统和平行机群[14]设计,一种平行无人机集群系统架构如图1所示。图1中,人工空中无人机集群、地面控制平台、空地通信部件、指控小组属于地面站的组成部分;实际空中无人机集群和人工空中无人机集群对应于平行系统中的实际系统和人工系统;地面控制平台执行实际空中无人机集群的态势显示与控制;指控小组控制地面控制平台和人工空中无人机集群的运行,通过地面控制平台实现对实际空中无人机集群的指挥控制。地面控制平台通过空地通信部件与实际空中无人机集群实现双向信息交流;人工空中无人机集群单向接收空中无人机集群的信息;人工空中无人机集群与地面控制平台直接互联,实现双向信息交流。
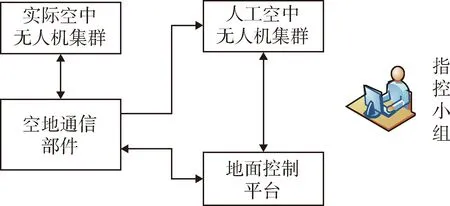
图1 一种平行无人机集群系统架构Fig.1 A parallel UAV cluster system architecture
基于上述平行系统架构,无人机集群地面站智能生成机理本质上可归纳为通过优化实现智能效果。人工空中无人机集群与实际空中无人机集群平行执行,人工空中无人机集群从实际空中无人机集群定期接收战场态势信息,从地面控制平台实时获取指控信息,针对战场态势新变化生成任务分配和航路规划新方案,并通过快速仿真实验实现方案对比,得到任务分配和航路规划新的优化方案,并将新的优化方案传到地面指控平台。指控小组依据新的优化方案做出指控决策。
需要强调的一点是:平行系统方法成立的前提条件是地空通信延迟与地面计算能力满足任务调整和航路再规划时限性要求。
3 仿生行为式智能生成的应用实现途径
借鉴生物群智能涌现机理,可以将成本相对低廉、功能相对简单的多个无人机组成无人机集群,通过无人机间、无人机与环境间的交互实现无人机集群的智能涌现以完成复杂的作战任务。仿生行为式智能生成主要可用于陌生环境下航路搜索、攻击与优化,以及集群队形控制2个方向。
3.1 陌生环境下航路搜索、攻击与优化
(1) 个体能力要求
如果无人机集群仅仅局限于模仿生物集群的搜索与简单攻击行为,则其个体能力可以相对简单,一般有以下几个方面:一是机动能力满足动力学运动学要求;二是具有识别目标(如蚂蚁识别食物、狼识别猎物)的能力;三是个体间的简单通信能力;四是具有攻击小型目标的能力。
满足这些功能要求的无人机可以做得比较廉价,因而可以大量配备。
(2) 行动过程与规则
以无人机集群搜索打击劫持人质的匪徒为例。
数名匪徒将多名群众劫持为人质于一内部结构未知的建筑物内,匪徒与人质处于建筑物内部何处不得而知。建筑物各个大门被匪徒关闭,有部分窗户破损可以进出微型无人机。无人机集群的任务是从出发地隐蔽接近建筑物,然后找到破损窗户,从破损窗户进入建筑物,寻找到达匪徒所在位置的通道,并击毙或制服全部匪徒。
行动过程如下:
第1步:输入任务指令和参数。任务指令:击毙或制服匪徒;参数:匪徒识别特征,匪徒所处建筑物的位置、外观。
第2步:隐蔽接近建筑物。无人机集群根据指令,自主飞行到建筑物附近隐蔽集结。
第3步:搜索破损窗户。各搜索无人机围绕建筑物按一定搜索策略(如平行搜索)进行搜索,发现破损窗户或到达指定时间后报告搜索情况。
第4步:搜索目标和可行飞行通道。各搜索无人机随机选择从多个破损窗户中的一个进入建筑物,并在建筑物内各个房间随机搜索,发现目标或到达指定时间后报告搜索情况。期间,为避免重复搜索,搜索无人机与邻近无人机交换已搜索区域的信息。
第5步:对目标攻击。攻击无人机根据搜索无人机提供的通道信息,选择优化路径,飞行至目标区域,对目标实施攻击。
第6步:返回。完成攻击的无人机在集结处集中,到达规定的时间后集体返回到出发地。
行动规则如下:
路径选择。如果多于一条无人机进出通道,则选择路径短、暴露时间少的一条。
目标在多处时攻击无人机的选择。各攻击无人机按照各处目标数量占比随机选择一处目标。
攻击目标选择。攻击无人机到达目标区后,随机选择一个目标进行攻击,后续攻击无人机在未被选择目标中随机选择一个目标进行攻击。
(3) 特点分析
仿生行为式智能生成有如下特点:
1) 无人机个体功能简单,因而廉价,可以大量制造。
2) 寻优是可靠的。因为群体中个体数量众多,部分个体失效并不影响整体寻优的效果。
3) 可以并行执行任务。尽管存在冗余,单位效率不高,但由于个体众多,因此可以并行执行任务,如多个个体同时执行搜索任务。
4) 群体寻优效率不高。因为存在冗余,又没有中央控制,其寻优的资源分配并不是高度有序的,重复作业现象广泛存在,因而寻优的效率是不高的。
3.2 集群队形控制
无人机集群队形控制是仿生行为式智能生成应用的另一个重要方向。
关于集群队形控制,大体上可区分为局部规则控制法、长机—僚机法、人工势场法、虚拟结构法、一致性控制法等[4,15-16]。其中,局部规则控制法是完全采用仿生行为式智能生成的方法。局部规则控制法基于个体对邻近个体的局部感知,在简单规则支持下实现对集群整体队形的智能控制。
鸟群行为机制对于无人机集群编队协调自主控制具有很多借鉴意义。①二者所受到的环境干扰因素(比如强光照,厚云层以及不稳定气流等) 基本相同,鸟群系统中的集群运动机制对于这类特性环境噪声的抗干扰性恰恰也是设计无人机集群系统协调控制算法所需要的;②任务环境均要求二者只能在运动中进行交互;③二者在任务需求上均需要实现在避免个体发生碰撞的基础上,尝试与邻居个体保持接近,同时与其速度一致[17]。
Reynolds在对鸟群运动研究的基础上,于1986年提出Boid模型,该模型内个体可感知周围一定范围内邻近个体的飞行信息,并遵从3种基本行为准则—聚集(cohesion)、分离(separation) 和对齐(alignment),指导其做出下一步的飞行决策。基于Boid模型及相关扩展研究成果所构建的规则,无人机集群能够完成队形保持、避障等基本动作,实现集群队形基于简单规则的有限智能控制。对于集群队形切换、缩放、旋转等复杂动作,还需要在无人机个体获取指控信息条件下,采用特定的队形切换、缩放、旋转算法才能实现。
4 功能分布式智能生成的应用实现途径
功能分布式智能生成主要可用于信息融合、威胁判断、任务调整与航路再规划等方向。
4.1 信息融合和威胁判断
信息融合是人们通过对空间分布的多源信息——各种传感器的时空采样,对所关心的目标进行检测、关联(相关)、跟踪、估计和综合等多级多功能处理,以更高的精度、较高的概率或置信度得到人们所需要的目标状态和身份估计,以及完整、及时的态势评估,为指挥员提供有用的决策信息。信息融合可采用多种智能方法,如贝叶斯推理方法、Dempster-Shafer方法、模糊集合理论、聚类分析方法、专家系统方法、人工神经网络方法等[18]。
无人机集群的信息融合采用分布式的信息融合结构,其融合任务由多个个体平台按照预先约定规则共同协作完成。如对运动目标的信息融合,大多数无人机个体完成局部估计,担负融合中心任务的少数个体基于局部估计完成全局估计。信息融合的任何单个个体平台都不具备独立完成信息融合任务的能力,但将各个个体平台通过有限的通信联络组织起来,就可以完成较为复杂的信息融合任务,实现了基于分布式问题求解的智能涌现。
威胁判断可采用与信息融合类似算法或更简单的算法实现。威胁判断结论需要军事人员的最后确认。
4.2 任务调整和航路再规划
无人机集群任务调整与航路再规划可采用任务资源分配、航路规划所用的启发式优化算法,如果时效性不满足要求,可通过适当放宽算法收敛条件来解决。此外,无人机集群任务调整与航路再规划还需在线分布式实现。参与任务调整与航路再规划的各个无人机在计算时要反复与其他个体交互规划过程信息和结果信息。为此,无人机集群任务调整与航路再规划宜采用异步并行推进策略[19]。
5 结束语
无人机集群智能的生成模式及其应用实现途径等智能生成样式问题研究是无人机集群作战力量编成确定和作战运用设计的基础支撑。从智能生成的主体及其相互关系视角看,无人机集群智能的生成模式可归结为集中式、仿生行为式和功能分布式3种。
无人机集群智能生成方法广泛多样,传统优化方法可用但适应面比较窄,自然计算领域的大多数方法是无人机集群智能的有效生成方法;平行系统方法是一种新颖的辅助决策方法,能在一定条件下应用于地面站对空中无人机集群的任务调整和航路再规划;仿生行为智能生成方法有望用于陌生环境下航路搜索攻击与优化、集群队形保持和避障的有限智能控制。