门机起升调平系统的设计与探讨
2020-11-25何兴
何兴
(秦皇岛港股份有限公司杂货港务分公司,河北 秦皇岛 066000)

图1 门机起升机构速度调平程序
港口装卸用门座式起重机(简称门机)主要由起升、旋转、变幅、行走四大运行机构组成,其中起升机构是使用最频繁的机构,其稳定性直接影响着门机的装卸效率。起升机构是由开闭、支持两个小机构组成,在使用抓斗作业时,需对开闭斗位置进行标定后再作业,而在正常使用中,作业人员习惯在开闭斗标定时让支持机构处于不受力状态,防止起升过程中抓斗自动打开货物散落对下方的人员及设备造成威胁,在起升的过程中再由程序内部的速度补偿对支持、开闭进行调平。但在使用过程中,我们发现开闭机构的故障率明显高于支持机构,严重的甚至导致开闭机构溜勾(即抓斗下坠)发生安全事故。分析起升机构程序及现场数据发现支持机构经过速度补偿后能与开闭保持水平,但基本没有承重,抓斗及货物的主要重量全部由开闭机构承重,容易发生此类安全事故,但如果将支持机构的速度补偿调大,则容易导致抓斗在半空开斗,同样存在较大的安全隐患。如果在速度补偿调平的基础上增加一种调平程序就能解决该问题,防止此类事故的发生。
1 速度补偿程序的工作原理
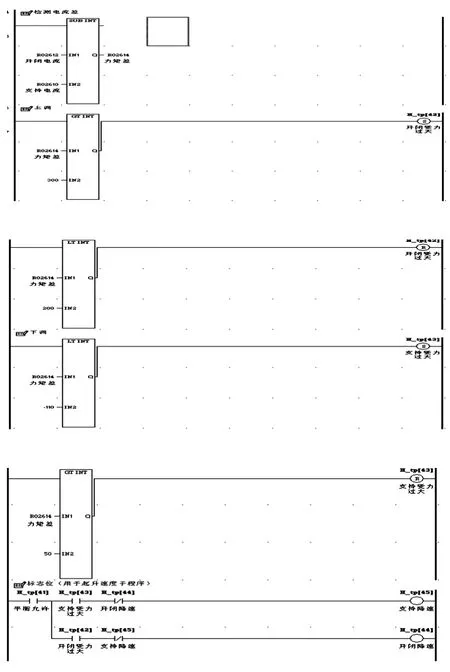
图2 力矩调平程序的设计
从图1可以看出,速度调平的基础是闭斗设定的情况为基础的,人为控制因素较大,操作人员为了避免闭斗不严以及中途开斗导致货物撒漏的情况发生,一般开闭斗标定时让支持机构处于不受力状态,在起升过程中速度补偿只能将支持、开闭机构调整到闭斗标定时的状况,开闭承受整个起升机构的重量,开闭系统的变频器、电机、钢丝绳均处于过载的状态,非常不利于门机安全运行。
2 力矩调平程序的设计
在该程序块中最初选择将开闭与支持的变频器输出电流采集进行减法运算,结果作为两个机构的力矩差,来对支持、开闭进行速度调整,但在使用过程中,发现变频器的输出电流对该机构的城中情况反应不是很准确,受机械磨损等外界情况影响较大,在使用时经常有调整过大或不到位的情况发生,后将开闭、支持电流的采集点选用力矩限制器的承重限位,既能准确地反映开闭、支持的实际承重,又能在程序中设定整车的最大起重量,防止门机超载存在安全隐患。并且在程序设计时开闭承重的比重比支持稍高,同时又不会使开闭全部承重,两个机构的力矩基本能保持在同一水平。
3 结语
该系统是为了确保门机起升机构运行时,支持与开闭两个小机构在保持速度与力矩的一致的同时,防止抓斗的自动开斗,确保门机的安全运行。经过几年的应用实践,门机起升调平系统已证明它的效果及可靠性,提高生产效率的同时还能增强设备的稳定性和安全性。
