虚拟仿真装配本科实验教学方法探讨
2020-11-25
(南京工程学院机械工程学院 江苏·南京 211167)
1 问题背景
装配是《机械制造工艺学》课程的重要章节,虚拟装配或数字化装配是现代先进装配技术的关键内涵之一1。以《机械制造工艺学》讲授的内容为基础,飞行器制造专业开设了《飞机装配工艺学》2,船舶工程技术专业开设了《船体装配工艺学》3,等等。然而建设大型结构制造尤其是装配的实践教学平台有如下难题:(1)飞行器、大型船舶舱段等大型制造装配现场难以复制使得学校开展大型装配实验没有可行性。(2)操作安全性要求使得学校难以开展装配实验。(3)传统装配实验模式无法满足探究性实验的要求。传统实验更多是认知型实验,让学生掌握实验的基本方法和操作,不允许出现“失败”的实验结果,学生往往都在正确工艺参数指导下做重复实验,严重影响学生探索精神,实验探究性不强4-6。
目前虚拟仿真教学在各高校广泛开展7。但针对虚拟仿真装配教学,由于涉及的数学知识与专业课程较多,实践过程中尚较难针对本科生开展虚拟仿真装配教学,或仅停留在视频观看或较为简单的操作。针对上述问题,本实验教学依托某型国家虚拟仿真实验教学平台,探讨了大型结构数字化装配的理论知识及其简化讲解技巧,基于该系统开展教学方法与流程设计研究,帮助学生系统地掌握主流先进数字化装配技术原理、工艺设计方法、实验分析方法。
2 大型结构数字化装配的理论简化
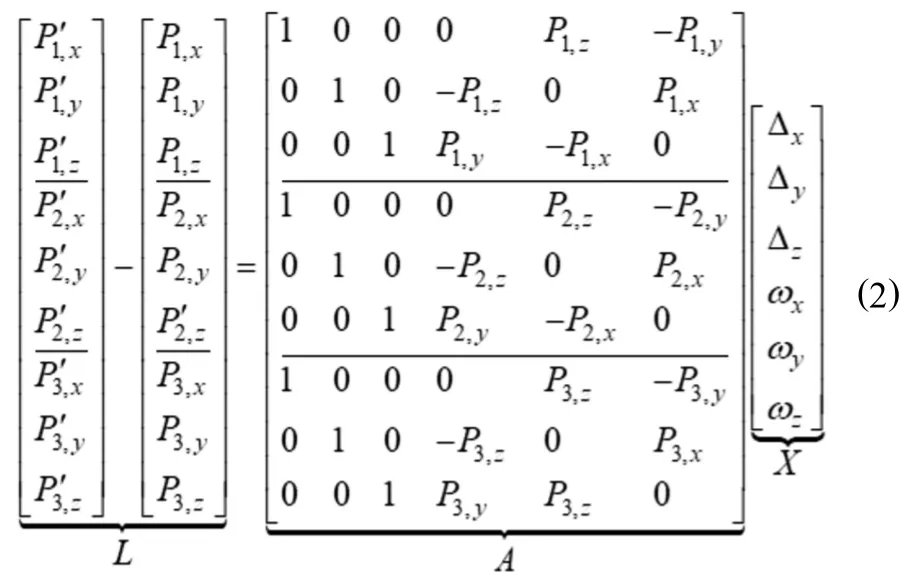
在课堂教学中,首先讲解数字化对接装配系统组成,如图1所示,以及系统运行原理,其硬件包括用于大空间三坐标测量的激光跟踪仪、三坐标运动定位器、运动控制系统、大部件等。引导学生回忆机械制造工艺学、线性代数、机构学等基础知识,并进行适当补充。应该注意,由于实际装配的数学模型较为复杂,需要设计简化推导方法,从而使理论水平尚浅的本科学生可较为直观简便地接受大型结构数字化装配的理论知识。在此以大型结构2的调姿量计算为例,设P1,L P3为关键点当前坐标,P1',L P3'为关键点理论坐标。S1,L S3为球心当前坐标,给出装配运动量计算步骤如下:
2.1 位姿解算
对于单点,当前坐标和理论坐标之间有小旋量关系
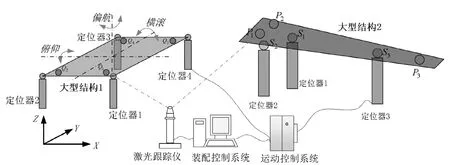
图1:大型结构数字化装配原理示意图

上式中,T为表示矩阵转置,-1表示矩阵求逆。
2.2 姿态调整运动解算
以定位器1为例,在姿态调整(不平移)后的球心坐标为S1',根据式
则运动量为
定位器2,3与此相同。
上述方程的理解或推导记忆仅需要学生掌握常规的线性代数、机构学等相关知识即可,相对于大型结构装配真实方程大大简化,但其核心原理并未改变。
3 虚拟仿真装配实验教学方法与流程
在课堂理论知识讲解的前提下,设计装配仿真教学应用过程如图2所示,教学过程中的部分界面如图3所示。仿真教学主要过程如下:
(1)大型结构吊装上架:采用动画模拟技术,使学生了解实际大型结构桁吊上架过程。
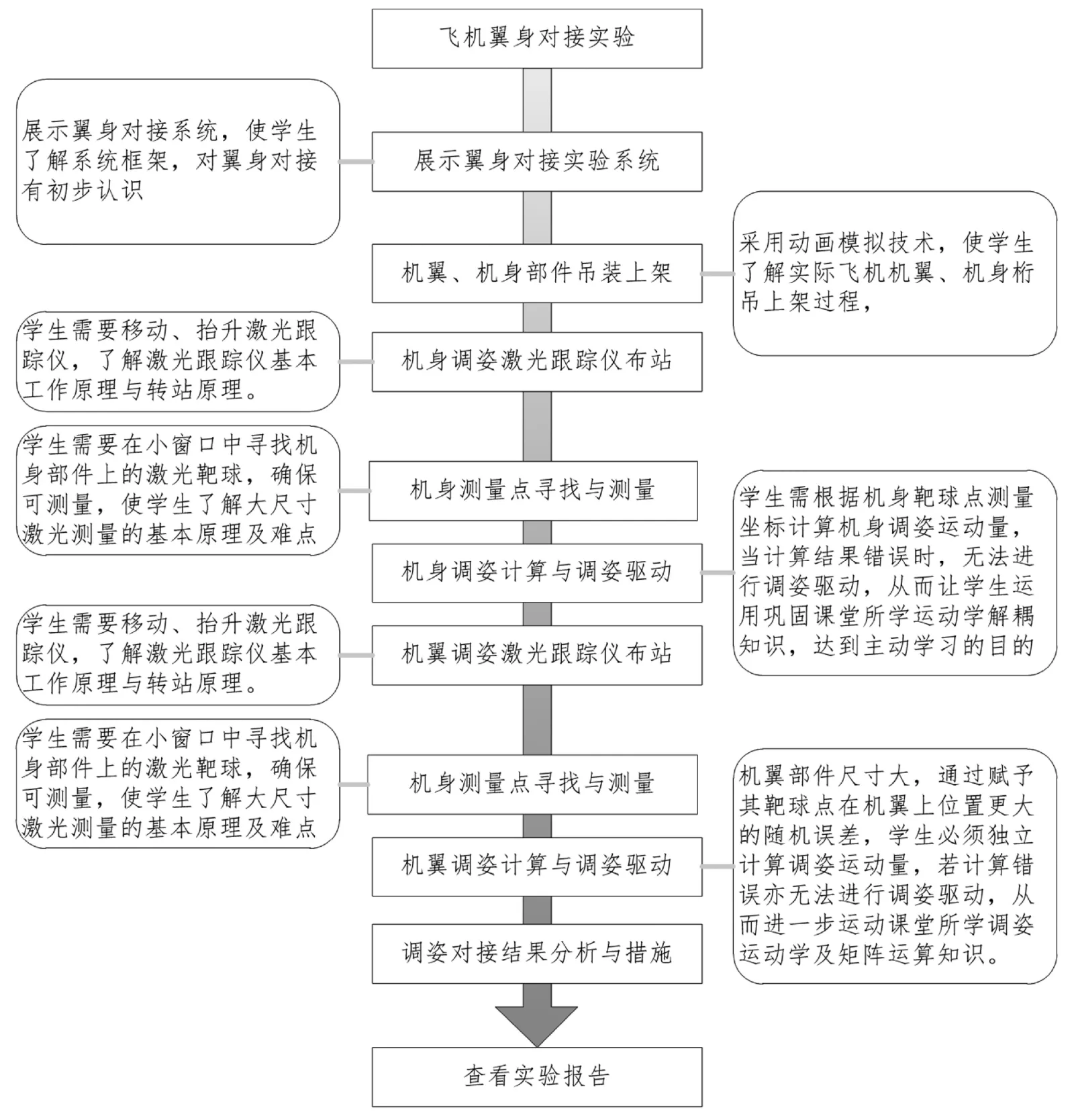
图2:大型结构虚拟仿真装配实验教学方法
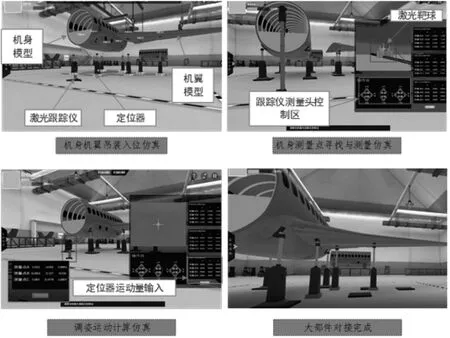
图3:大型结构数字化装配仿真实验教学场景(部分)
(2)激光跟踪仪布站:待机身、机翼放稳之后,点击激光跟踪仪,拖动到合适的位置,点击地面,即放置跟踪仪。(使用WSAD四个键,分别对应前进、后退、左移、右移)。由于学生需要移动、抬升激光跟踪仪,了解激光跟踪仪基本工作原理与转站原理。
(3)大型结构1(机身)测量点寻找与测量:跟踪仪放置成功后,点击操作台,控制测量仪的升降和转向,以找到测量点靶球,右边界面上的黄色十字标对应上测量点,右边的测量点坐标自动获取成功。由于学生需要在小窗口中寻找机身部件上的激光靶球,确保可测量,使学生了解大尺寸激光测量的难点(见图 2)。
(4)大型结构1调姿计算与调姿驱动:当大型结构1的四个点全部测量完毕后,学生根据课堂教授的理论知识计算出需要调整的值,然后在第三个里面点击输入,输入完毕后点击“开始调整”,大型结构1根据输入的值做对应调整。由于学生需根据大型结构1靶球点测量坐标计算大型结构1调姿运动量,当计算结果错误时,无法进行调姿驱动,从而让学生运用巩固课堂所学姿态与位置的运动学解耦知识,达到主动学习的目的。
(5)大型结构2(机翼)仿真装配实验教学与上述(2)-(4)相同,不再一一介绍。
(6)查看实验报告:上述步骤完成后,可点击“实验报告”按钮,系统弹出实验报告,查看报告并提交。
4 结论
通过基于简化模型的装配理论知识的讲解,帮助学生直观发现线性代数、矩阵论、高等数学等基础数学课程的重要性及价值。在大型结构数字化装配仿真实验过程中,学生通过激光跟踪仪的布站等环节,掌握激光跟踪仪的使用以及测量过程等知识,通过实践培养了学生知识的掌握能力;学生通过调姿计算和驱动,探索机械设计中运动学解耦分析方法,培养了工艺的探索优化能力;通过对装配过程和结果进行深入分析和实验报告撰写,培养了工程问题的分析总结能力。
