基于测量数据积累的弱目标检测前跟踪算法
2020-11-24
(国防科技大学 电子科学学院,湖南 长沙 410073)
0 引言
随着隐身技术的发展,低信噪比(SNR)目标给雷达检测与跟踪系统带来巨大的挑战。传统先检测后跟踪(Detect Before Track,DBT)技术将检测和跟踪任务当作独立的任务分别处理,首先进行目标检测,再由跟踪模块对检测结果进行关联、状态估计和航迹处理。当目标回波信噪比降低,检测模块的阈值处理可能导致大量的弱目标被丢弃,发生漏检;而为了提高检测概率,降低检测阈值,则可能引起虚警密度增高,不得不将大量资源用于处理数据关联,限制了系统处理其他任务的能力。尽管有学者引入神经网络方法对目标进行检测,但是网络性能受限于超参数的设置和数据集质量的影响,目前未形成有效的超参数优化手段[1]。为了克服上述问题,20 世纪80 年代逐渐形成检测前跟踪(Track Before Detect,TBD)的思想,其基本方案是对潜在目标进行跟踪,通过积累多帧观测数据的回波能量,提高目标的检测判决SNR,因此,TBD 也可以看作是一种幅度特征辅助的跟踪算法。
TBD 技术首次应用于红外目标的检测与跟踪[2],随后扩展到雷达相关领域[3]。尽管GROSSI等[4]提出了使用低门限以减少观测数据,但目前大部分TBD 的相关研究仍采用完整的传感器原始观测数据。在雷达应用中一般使用极坐标下的回波视频观测数据,其对应的观测空间与目标状态空间通常存在高度非线性映射关系,因而不能使用严格要求系统线性高斯的卡尔曼滤波。同时,由2001 年SALMOND 等[5]首次将粒子滤波引入到TBD 框架中,并认为目标强度信息是先验已知的,该假设对于非合作目标一般是不成立的。利用统计模型近似目标雷达截面积(RCS)起伏特性存在一个问题[6]——目标RCS 的平均值如何获得。同时,在点目标假设条件下,尽管认为接收信号仅包含一个频率响应的单色波[7],但是根据发射信号的模糊函数和接收回波时使用的窗函数会导致目标能量扩散到临近分辨单元,BPOERS 等[8]利用高斯混合点扩散函数PSF 来描述这种现象,但是该算法中仍然假设目标强度参数是先验已知的。TONISSEN 等[9]利用最大似然估计对目标的起伏进行估计,而ROLLASON等[10]直接将目标的强度信息建模为目标状态变量,随滤波器的预测更新进行估计。在上述TBD算法中,PSF 的参数是根据经验设置的,且该参数设置的数值也会影响目标强度参数的估计值。
本文在目标强度参数未知的条件下,提出一种基于多帧测量数据积累的弱目标TBD 算法,通过积累目标潜在航迹在多帧间的测量数据,完成对目标强度参数的准确估计,同时有效实现对弱目标的联合检测与跟踪。在不同条件下,所提算法与将目标强度参数建模为状态变量的主流TBD 算法进行仿真比较。仿真结果表明,基于测量数据积累的TBD具有更稳健、目标强度参数估计更准的优势。
1 系统模型
1.1 目标动态模型
考虑一个点目标在x-y平面内运动,目标的运动状态服从一阶马尔科夫匀速直线(CV)运动,速度干扰为加性过程噪声,则目标状态的动态模型可表示为


式中:T为雷达扫描时间间隔。
目标存在变量mk∈{0 1}可建模为一个二状态马尔科夫链,mk=1 表示k时刻目标存在于观测区域中,mk=0 则表示k时刻没有目标存在,相应的马尔科夫转移概率矩阵可表示为

式中:pb=p{mk=1|mk-1=0}为目标新生概率;ps=p{mk=1|mk-1=1}为目标持续存在概率。
1.2 传感器测量模型
考虑经过脉冲压缩处理后的雷达距离-方位强度观测数据。在k时刻,1 次雷达扫描获取的观测数据Zk包含了Nr和Na个分辨单元,其中距离和方位的分辨率分别为Δr和Δa,可以得到



Ω(xk)为k时刻受到状态为xk的目标影响的分辨单元索引范围,即若点目标状态对应的空域位置索引为(ix,jx)时,

nr与有关,na与有关。在雷达距离-方位强度观测数据中,受目标影响的区域通常是一个nr×na大小的矩形区域,如图1 所示。

图1 目标影响的分辨单元索引范围示意图Fig.1 Schematic diagram of the index range of resolution cells affected by the target
由点目标的起伏特性和点扩散函数可知,当姿态不发生显著变化时,点目标的回波是一个平稳随机过程,其一阶矩(即目标强度参数)具有时不变性。因此,可以通过一段时间内的观测数据来估计目标强度参数。本文假定目标回波强度起伏模型为Swerling1 模型,则在状态xk的条件下,似然函数服从参数为的指数分布[8]:

式中:

2 伯努利粒子滤波算法
贝叶斯观点认为,后验概率密度函数(Probability Density Function,PDF)封装了目标状态的所有信息。只要通过贝叶斯定理递归地更新目标后验PDF,就能得到目标的状态估计。伯努利滤波器是理论最优单目标贝叶斯滤波器[11],其预测与更新方程如下:

式中:tk|k-1(xk|xk-1)为由目标动态模型导出的目标状态转移密度函数;为第k帧目标在整个量测集上的似然函数。
由于测量模型经过二维笛卡尔坐标系到雷达距离-方位角极坐标的变换,同时考虑点扩散函数的影响,目标状态与测量之间存在非线性映射关系。本文采用当前广泛应用的粒子滤波完成前述非线性贝叶斯的预测和更新步骤[12]。
2.1 目标平均强度参数估计方法
由式(8)所表征的似然函数计算需已知目标强度参数,利用式(10)进行更新时,必须首先对目标强度进行估计。ROLLASON 提出的TBD 算法是将目标强度建模为状态变量,随粒子状态更新。计算似然函数时,利用该状态量作为目标强度参数。但是强度参数估计精度与PSF 参数设置紧密相关,仿真实验结果表明,即使准确的PSF 参数设置也不能保证估计目标强度参数的精度。尽管目前大多数以状态变量建模目标强度的TBD 算法能够完成目标的联合检测与跟踪,但是不能够有效准确估计目标未知的强度信息,难以为后续的目标分类或识别提供有用的目标强度特征。针对上述问题,本文通过积累目标航迹多帧间所占据分辨单元的测量数据集合,以积累数据的多帧最大似然估计值作为目标平均强度的估计,由下式计算得到:

式中:u(⋅)为阶跃函数;Ψk为积累数据的多帧最大似然估计值,

式中:σ2为测量噪声功率,本文中假定是已知的;e为受目标状态影响的分辨单元索引。
将式(11)结果代入式(7)和式(8),可以得到当前滤波时刻的目标强度似然函数。
Th为输出阈值,对于有限长的观测数据,野值对估计结果可能产生较大影响,需要剔除野值的影响[13]。本文采用阈值处理的方式,即仅当估计功率大于输出阈值时,估计器才输出目标强度估计;否则,其测量值假定为由噪声引起。数据积累长度必须达到设定的积累长度Wl,之后对积累数据求平均值输出,即k≥Wl。为了简化后续说明,定义与输出阈值对应的输出阈值SNR:

式中:RT为输出阈值SNR。
2.2 伯努利TBD 的粒子实现
设在k-1 时刻,得到粒子的状态以及目标存在概率的估计pk-1,那么伯努利粒子滤波方案可由以下步骤递归得到[12]:
步骤1预测存在概率:

步骤2随机从建议密度分布函数中产生粒子状态及其对应的权重:

式中:N为存活粒子的数目;B为新生粒子的数目。
步骤3贝叶斯框架下的TBD 算法通常可以认为是一种目标强度特征辅助的跟踪滤波算法,因此,在滤波过程中通常需要使用目标强度信息作为先验知识。在粒子实现中,粒子的状态演化路径可以看作目标的潜在航迹,通过目标潜在航迹的测量数据可提取目标的强度信息,本文所提算法利用下式计算似然比:
式中:f1(⋅|x,P)表示状态为x的目标似然函数,P为式(11)通过积累测量数据估计得到的目标平均强度;f(⋅)为噪声似然函数,由式(7)和式(8)给出。
步骤4更新粒子权重:

步骤5估计存在概率:

步骤6归一化粒子权重并估计目标状态:

采用最小均方误差估计器(MMSE)对目标状态进行估计:

步骤7重采样粒子得到。
3 仿真分析
3.1 仿真条件说明
设置雷达传感器位于坐标系原点,系统设置参数见表1。仿真设置200 个雷达传感器扫描周期,扫描间隔T=1 s,产生200 帧仿真数据。假设雷达测量区域为r∈[11 km 12 km],θ∈[45o90o],距离分辨率Δr=2 m,方位分辨率Δa=0.5o,则距离单元数为Nr=500,方位单元数Na=90。目标在第15 帧出现于(8.0 km 8.5 km)处,并以的速度朝向雷达作匀速直线运动。目标回波平均强度为Ptar=0.9。

表1 实验1 中滤波器参数设置Tab.1 Filter parameter settings for Experiment 1
仿真中其他参数设置为:目标存活概率ps=0.99;新生概率pb=0.01;每时刻滤波粒子总数为8 000,其中新生粒子B=2 000,存活粒子N=6 000;粒子新生概率密度分布bk(x)假定为状态空间内的均匀分布,即

SNR 定义为

式中:R为SNR。
仿真实验算法性能评估指标采用最优子模式分 配(Optional Sub-Pattern Assignment,OSPA)[14]作为目标状态估计精度的评价标准,选取OSPA 参数截断距离c=200 m,距离参数p=2。定义目标平均强度估计精度为

式中:Ttar、L分别为雷达测量区域内目标存活的时间帧以及其相应的帧数。
3.2 仿真结果与分析
实验1 对比以状态变量建模目标强度的TBD算法(下文称主流TBD 算法)与本文所提的基于测量数据积累的TBD 算法的性能。由于主流TBD 算法性能受限于点扩散函数各维度扩散参数的设置,本实验设置3 组不同扩散参数设置的主流TBD,与基于测量数据积累的TBD 进行性能对比。需要指出的是,同一维度下的扩散参数Lr和R设置时,有意义的为其比值,故本实验参数设置见表1。
对比所提基于测量数据积累的TBD 算法与不同扩散参数设置下主流TBD 算法的OSPA、目标存活概率和目标平均强度估计性能,如图2~图4 所示。由于基于测量数据积累的TBD 算法是通过粒子积累强度测量数据估计目标平均强度,粒子必须至少连续存活Wl帧才能输出有效的估计值,即基于测量数据积累的TBD 算法需要一个Wl帧的起始时延,因而收敛速度低于主流TBD 算法。随着时间的积累,目标平均强度估计逐渐收敛到目标真实平均强度处,所提算法OSPA 也逐渐收敛到主流TBD算法在目标强度参数与扩散参数完全已知时的曲线(本文称该曲线为贝叶斯最优性能曲线,即在该算法框架下,所有先验都是已知且准确的)。对于目标的存在性,一种通常的做法就是与目标存活概率检测阈值比较,事实上该阈值通常与系统的虚警指标有关。本文不讨论相关内容,因此,设置为0.5[12],即当目标存活概率大于0.5 时即认为目标已经被检测到。在SNR 为6 dB 的情况下,所提算法和主流TBD 都能在目标出现后较快检测到目标,如图3 所示。
此外,相比于基于测量数据积累的TBD 算法,主流TBD 算法在PSF 的扩散参数选择不同数值时,表现出不同程度的性能损失,尤其是当所设置扩散参数小于真实参数时,滤波器是以增大目标平均强度估计为代价来保持有效的检测和跟踪性能。本文所提基于测量数据积累的TBD 算法则在保持良好的跟踪和检测性能的基础上,提高了目标平均强度估计的准确性,如图4 所示。依据上述实验及相关评价指标,可以得到各组算法的仿真实验结果对比,本文所提算法在平均估计精度接近扩展参数已知的主流TBD 算法的同时,强度参数估计精度相较于主流TBD 算法具有明显的优势,见表2。
实验2 为了评估所提算法的性能,考虑不同SNR 观测场景,本实验给出了3 组不同SNR 条件的滤波器,参数设置见表3。
图5~图7 显示了固定噪声功率σ2、R分别设置为12 dB、9 dB、6 dB 时基于测量数据积累的TBD 算法的性能对比。在不同SNR 条件下,基于测量数据积累的TBD 最终均能够收敛于参数完全已知时的TBD 最优性能处。
结合图5 与图6 可以看出,滤波器收敛速度受SNR 影响,低SNR 时收敛时间更长。由表4 可以看出,检测到目标的帧数在6 dB 时,相较于9 dB 与12 dB 有2 帧的延迟,估计精度也更低。
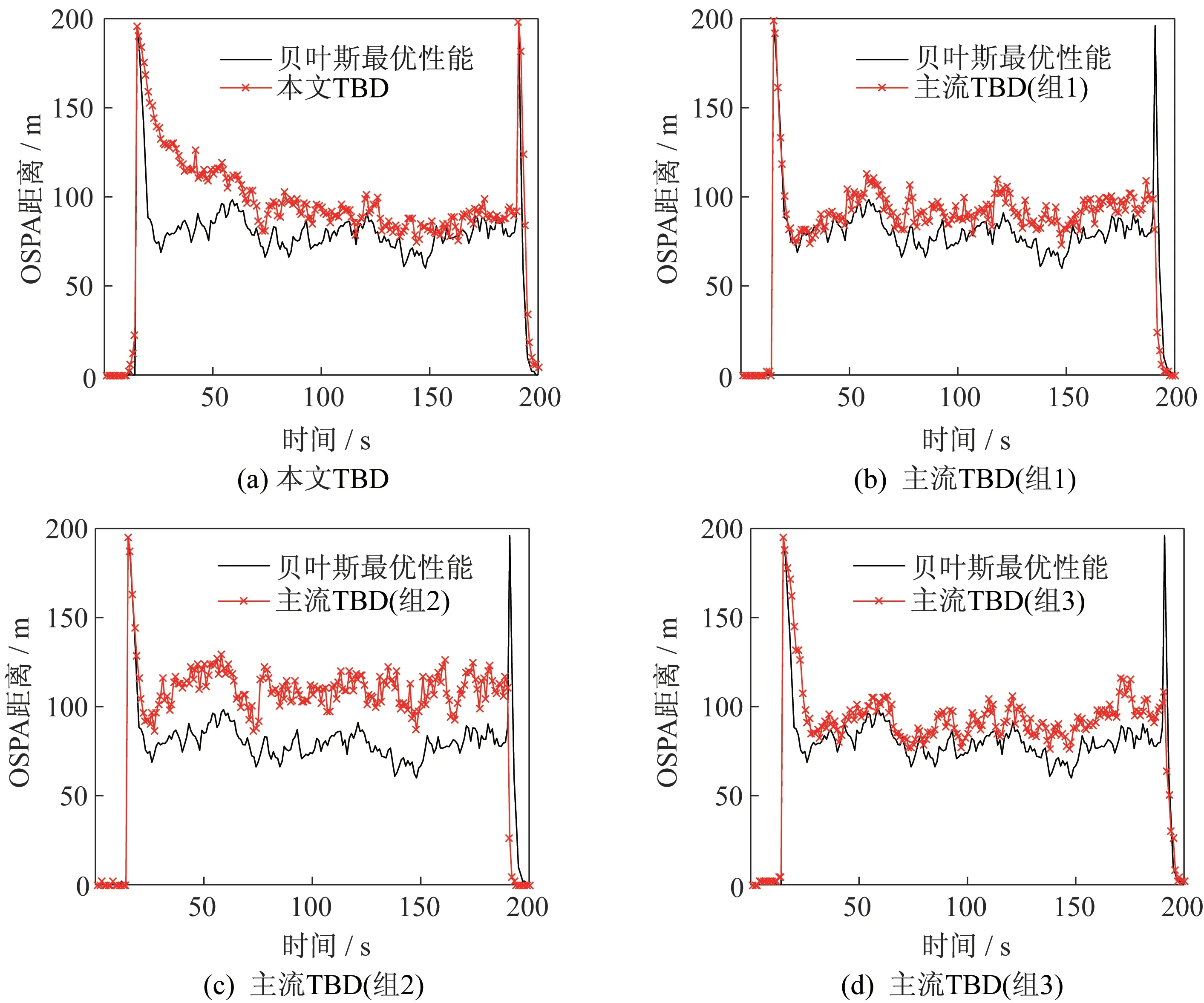
图2 实验1 中不同算法与贝叶斯最优OSPA 性能对比Fig.2 Comparison of the OSPA distance results obtained by different algorithms and the Bayesian optimal method in Experiment 1

图3 实验1 不同算法与贝叶斯最优目标存活概率对比Fig.3 Comparison of the target existence probability results obtained by different algorithms and the Bayesian optimal method in Experiment 1

图4 实验1 中不同算法与贝叶斯最优目标平均强度估计对比Fig.4 Comparison of the target average intensity estimation results obtained by different algorithms and the Bayesian optimal method in Experiment 1

表2 实验1 中各组滤波器仿真实验结果对比Tab.2 Comparison of the simulation results of each group of filters for Experiment 1

表3 实验2 中滤波器参数设置Tab.3 Filter parameter settings for Experiment 2
图7 显示了SNR 越高,目标平均强度估计值离目标真实强度值越远。这是由于本实验在不同信号SNR 时仍选择相同的输出阈值Th,因而对于高SNR 目标,低幅度测量数据的积累会降低输出目标强度的估计值,导致滤波器需要耗费更长的积累时间才能收敛到目标真实强度。下面设计实验3 进一步验证该结论。
实验3 为了验证不同输出阈值Th对基于测量数据积累的TBD 滤波器目标平均强度估计的影响。输出阈值Th与RT关系由式(13)给出。本实验在R=9 dB 的条件下,对比4 组不同输出阈值的滤波器,参数设置见表5。
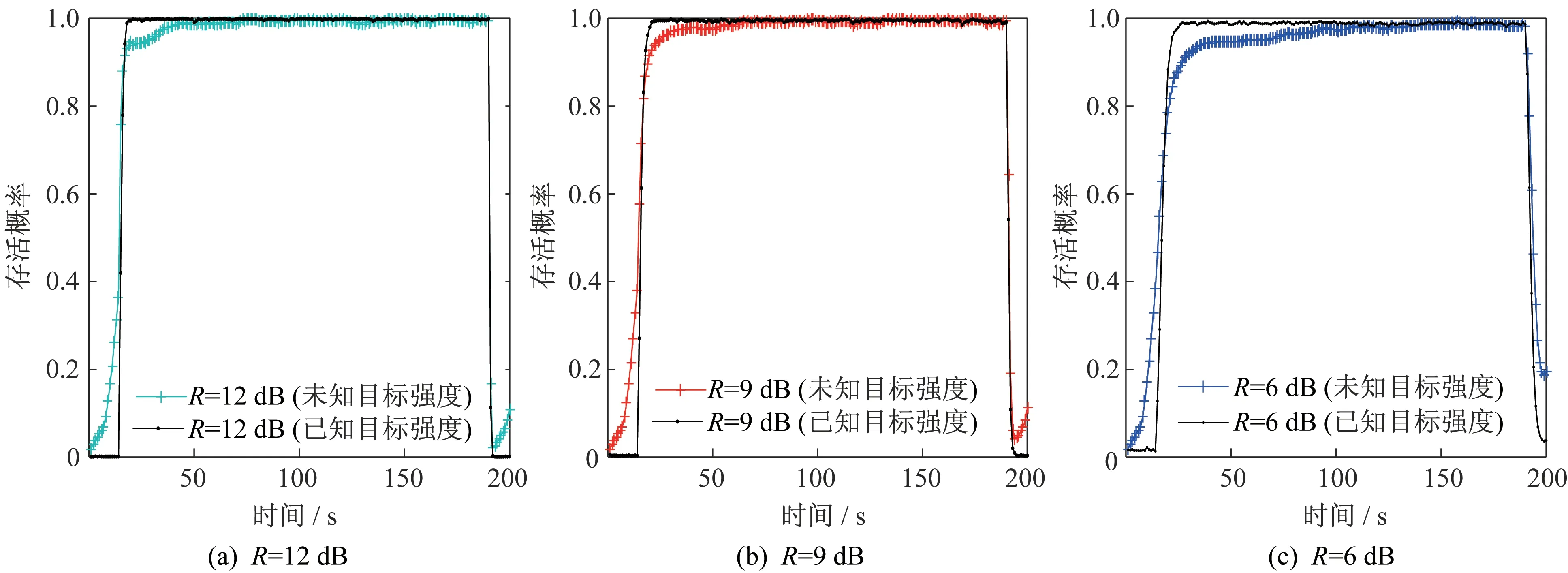
图5 实验2 中不同R 时,本文算法与贝叶斯最优目标存活概率对比Fig.5 Comparison of the target existence probability results obtained by the algorithm proposed in this paper and the Bayesian optimal method under differentR in Experiment 2

图6 实验2 中不同R 时,本文算法与贝叶斯最优OSPA 性能对比Fig.6 Comparison of the OSPA distance results obtained by the algorithm proposed in this paper and the Bayesian optimal method under differentR in Experiment 2

图7 实验2 中不同R 时,本文算法与贝叶斯最优目标平均强度估计对比Fig.7 Comparison of the target average intensity estimation results obtained by the algorithm proposed in this paper and the Bayesian optimal method under differentR in Experiment 2

表4 实验2 中各组滤波器仿真实验结果对比Tab.4 Comparison of the simulation results of each group of filters for Experiment 2

表5 实验3 中滤波器参数设置Tab.5 Filter parameter settings for Experiment 3
图8~图10 给出了RT分别为1、2、3、4 dB 时滤波器的性能对比。图8 说明当滤波器收敛后,不同输出阈值对估计性能影响不大。从图9 可以看出,低的输出阈值会导致滤波器将幅度较高的噪声认为是目标产生的回波,进行数据积累从而输出目标平均强度估计,而高的输出阈值则大大降低噪声积累的可能,同时也限制了滤波器对目标产生的低幅度回波进行积累,使得滤波器收敛速度较慢。图10则说明了在相同测量RT的条件下,滤波器对目标平均强度估计收敛速度近似,不同输出阈值影响收敛起点,在本实验产生仿真帧数内,4 dB 的输出阈值能够使滤波器的目标强度估计达到目标真实强度处。因此,输出阈值Th的选择需要对收敛速度和噪声抑制折中选择。合适的输出阈值能够在保证收敛速度的同时,达到所需的估计精度。当输出阈值为4 dB 时(见表6),目标强度参数估计精度最高,但收敛速度相较于输出阈值1 dB 延迟了3 帧,并且由于前期收敛较慢,使得目标存活期间的平均OSPA增大。因此,输出阈值的选择取决于系统对目标强度参数估计精度的要求。

图8 实验3 中不同RT时,本文算法与贝叶斯最优OSPA 性能对比Fig.8 Comparison of the OSPA distance results obtained by the algorithm proposed in this paper and the Bayesian optimal method under differentRT in Experiment 3

图9 实验3 中不同RT时,本文算法与贝叶斯最优目标存活概率对比Fig.9 Comparison of the target existence probability results obtained by the algorithm proposed in this paper and the Bayesian optimal method under differentRT in Experiment 3

图10 实验3 中不同输出阈值时,本文算法与贝叶斯最优目标平均强度估计对比Fig.10 Comparison of the optimal target average intensity estimation results obtained by the algorithm proposed in this paper and the Bayesian optimal method under differentRT in Experiment 3

表6 各组滤波器仿真实验结果对比Tab.6 Comparison of the simulation results of each group of filters for Experiment 3
4 结束语
针对主流TBD 算法对目标强度估计精度受限于点扩散函数的设置,提出一种测量基于测量数据积累的的弱目标TBD 算法,通过目标潜在航迹积累其多帧间所占据分辨单元的测量数据,以积累数据的期望估计目标平均强度,能够在实现对弱目标的联合检测与跟踪的同时,对目标强度参数完成准确估计,可为后续目标分类或识别提供有用的目标强度信息。仿真结果表明,在低SNR 条件下,基于测量数据积累的TBD 算法在目标强度估计精度和稳健性均优于主流TBD 算法,收敛速度和噪声抑制性能受限于输出阈值的选择。下一步还将重点研究如何提高本文所提算法输出阈值的自适应选择,并推广到扩展目标情形[15]。