轨道车辆蛇行运动GA-LQR主动控制研究
2020-11-18晏永曾京翟玉江张庆
晏永,曾京,翟玉江,张庆
轨道车辆蛇行运动GA-LQR主动控制研究
晏永1,曾京2,翟玉江3,张庆1
(1. 宁夏师范学院 物理与电子信息工程学院,宁夏 固原 756000;2. 西南交通大学 牵引动力国家重点实验室,四川 成都 610031;3.五邑大学 轨道交通学院,广东 江门 529000)
基于简化低自由度车辆模型与整车蛇行运动模型,研究性能指标对车辆主动悬挂LQR控制效果差异,利用遗传算法迭代得到最优的LQR控制器。研究结果表明:利用简化1/4车辆模型与整车模型设计出的主动控制器控制效果相差很大;性能指标的选择对车辆悬挂优化控制至关重要;对比2种不同性能指标条件,车体前、后端Sperling指数均有明显下降,而合理的性能指标会达到更加优异的主动控制效果,可以在较大运行速度范围内提高系统的平稳性。
车辆蛇行运动;主动控制;LQR控制;遗传算法
主动控制技术可以通过调节悬挂隔振参数提供所需的控制力,有效衰减轨道车辆车体振动[1]。同时,车体横向低频运动是影响生理和心理疲劳的主要因素[2]。线性二次型优化理论(LQR)作为一种经典的最优控制算法,在车辆悬架系统主动隔振领域的应用,克服了被动悬架系统的局限性[3],与PID等控制算法比较均具有良好的控制性能[4]。通过优化被动悬挂来改善动力学参数效果有限,采用LQR控制算法设计的车辆主动悬架系统,可以明显减少油罐车中轨道不平顺以及液体晃动对车辆的破坏性影响[5]。采用该控制理论设计的液压气动半主动悬架可以快速降低上部车辆的振动,在系统受到扰动作用下可以快速达到平衡[6]。通过加速度反馈采用线性二次高斯控制律(LQG)有效降低了轨道车辆车体横向振动响应[7]。但在LQR控制器设计过程中,权系数和的选择需要具备一定的专业工程经验,存在主观性的缺点。近年来结合大量优化算法可有选择出更佳的权值[8]。遗传算法(GA)凭借快速搜索线性二次型最优控制的加权系数优势[9],有助于使系统获得更佳的设计性能。利用GA-LQR振动控制方法可以明显改善乘坐舒适性和操纵稳定性[10−13]。在轨道车辆运行稳定性试验阶段,一种重要方法就是采用轨道同向激振法[16]测试车辆系统横向稳定性,此时车辆近似等效为1/4简化车辆横向模型。基于简化模型也开展了很多车辆悬挂控制优化研究成果[4,14−15],并且LQR控制器的性能又能优于模糊控制效果[3]。但简化车辆模型主动控制效果是否同样适用于整车模型是本文重点。本文在此简化模型下,针对给定性能指标设计最优LQR控制器。然后考虑车辆运行中轨道对轮对激扰存在时延特性,在同一性能指标下对比简化与整车车辆模型时LQR控制效果。同时,性能指标的选择对车辆稳定性的优化又是重要环节,最后选用不同的性能指标对比分析设计的最优LQR控制器对车辆运行平稳性差异。
1 车辆系统模型
通过滚振台对国内某型具有一系大定位悬挂刚度的动车组进行动力学性能试验,对滚振台施加武广线实测轨道线路激扰,由图1可知轮对与构架振动位移、频率几乎保持着同步运动。

图1 车辆横向振动数据采集与分析(有轨道激扰,车速380 km/h)
故本文将该型车的转向架近似等效成刚性转向架,建立了七自由度车辆蛇行运动模型。在原始车辆参数不变前提下,引入阻尼主动调节装置,横向安装在车体与前、后转向架中心的位置,根据采集到的时域数据动态调节阻尼力达到改善车辆稳定性、舒适性的目的。车辆系统结构简化由转向架、车体以及悬挂装置构成,结构如图2所示。
由于轮对与构架为刚性连接,满足轮对摇头角与构架摇头角相等,故在文献[17]刚性转向架建模分析基础上,建立了七自由度整车蛇行运动数学模型,其中车体包含横移c,摇头角位移c与侧滚c3个自由度;前、后转向架各包含横移t,摇头角位移t2个自由度。为了后续设计和优化主动控制器,首先需要将车辆模型转换为状态空间方程形式为
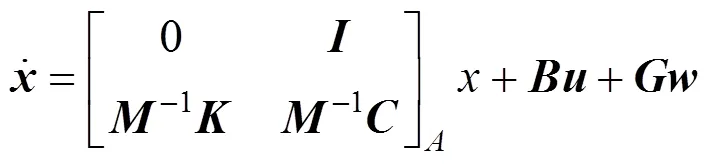
其中状态变量=[t1,t2,t1,t2,c,c,c]T,=diag (t,t,tψ,tψ,c,cψ,cθ)为质量系数矩阵,为7维单位矩阵。=[act1,act2]T是系统主动控制作动力,=[r1,r2,r3,r4]T中轨道横向不平顺输入向量。和分别为七维刚度矩阵和阻尼矩阵,分别为

其中
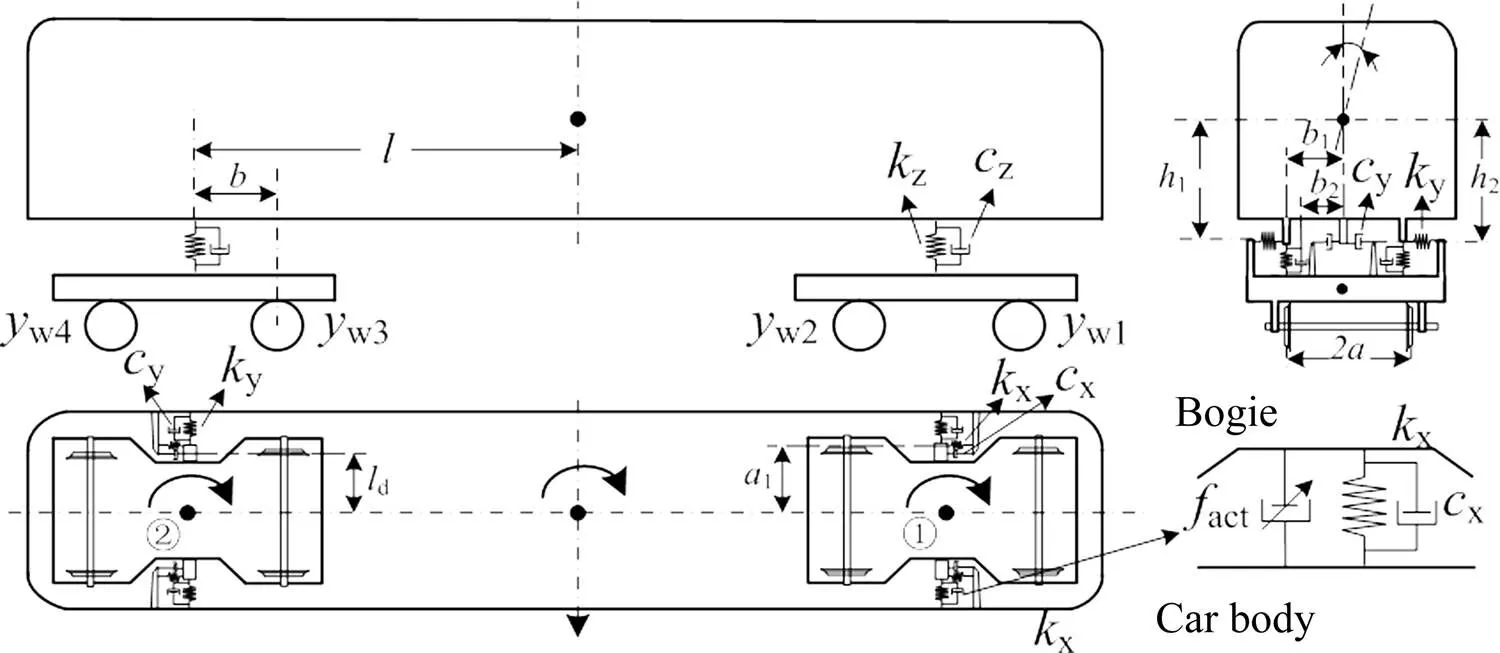
图2 车辆结构示意图
2 分析方法
工程中求解二次型状态调节器时,由于采集数据受限,往往不需要将所有状态变量作为性能指标,根据研究对象不同的性能要求,只需要关注特定的运动参数即可,故本文采用输出反馈代替状态反馈,性能指标形式为
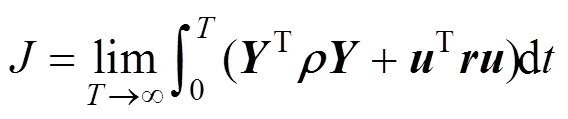
其中=diag(1,…,ρ),=diag(1,2)为权重矩阵,其中为关注的性能参数数量,12分别为前、后转向架横向阻尼力加权系数。为了改善系统稳定性,需要设计一个输出反馈控制器改变闭环控制系统特征根分布,控制系统结构如图3所示。
控制器=−1T,其中矩阵可由Riccati方程求出:
T+−−1T+=0 (3)
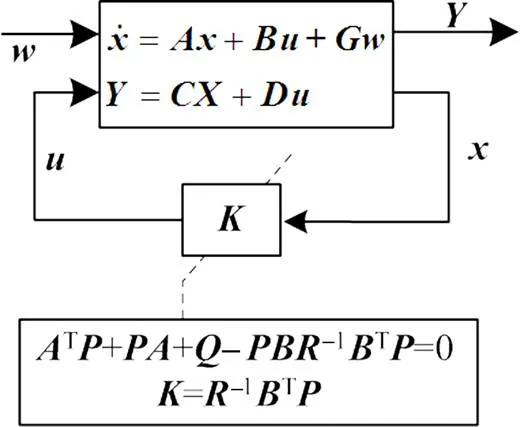
图3 二次型闭环控制系统
由此可知,直接决定控制器的形式。由于,该控制器的最优控制性能主要决定于权重系数和,本文采用遗传算法对权重系数配比优化。在进化搜索中以适应度函数为依据,利用种群每个个体的适应度来进行搜索[10]。适应度函数复杂度选取直接影响到遗传算法收敛速度以及能否找到最优解,故形式应尽可能简单。本文遗传算法筛选种群主要参数见表1。

表1 遗传算法参数设定
3 不同性能指标优化分析
本部分主要研究不同性能指标下设计的LQR主动控制器是否同时适用于整车及简化低自由车辆平稳性问题:首先分析了轨道不平顺同步激振时主动控制性能,进一步对比考虑轨道不平顺时延特性下性能指标对主动控制效果差异,最后分析了主动控制器差异对轨道车辆平稳性的影响。
3.1 轨道不平顺同步激振
轮对受到轨道同步激振时可将车辆蛇行运动模型近似等效为1/4车辆简化模型。为了同时分析车辆平稳性优化目标以及主动控制力特点,建立性能指标为

其中:1,2和3分别为车体横向、摇头与侧滚加速度加权系数,4为主动控制力的加权系数。
本文将其转化为单目标优化问题,即计算适应度函数最小时对应的LQR控制器即为设计目标,如(5)所示。与(4)相比,略去主动控制力部分,目的为获得优化后的主动控制力特征。

当种群迭代到第10代时,适应度函数值趋于平稳且很小,说明即车体横移、摇头及侧滚三者能量和非常小,此时最优权重个体分别为1=8.26× 105,2=9.28×105,3=9.29×105,4=10−9,此时控制力最大值达到3.5 kN。可以预测如果继续缩小权值4,主动控制力会更大。
通过计算前、后转向架中心上方对应的车体监测点横向位移,经过转向架向上传递的高频率能量得到很好的衰减,车体表现为低频小幅值振动,波动在3.5×10−7m附近,说明车体几乎保持不动,如图4所示。
(a) 车体;(b) 转向架
虽然设计出的控制器可以保证车体几乎不动,但模型的简化能否让实际车辆车体达到类似的减振动效果在后续内容分析。
3.2 轨道不平顺正常激励


其中:1和2分别为前、后端监测点横向加速度加权系数,3为主动控制力的加权系数,适应度函数最小化形式为

在性能指标1和2下通过遗传迭代,得到适应度函数变化趋势如图5所示:2种性能指标分别在种群迭代到第11代、第9代时,适应度函数值趋于平稳。
对应2种性能指标下的最优权重个体如表2 所示。
相对应的控制器分别用1与2表示,具体如表3所示。

图5 性能指标迭代曲线(v=60 m/s)

表2 不同性能指标下的最优个体

表3 不同性能指标对应的控制器
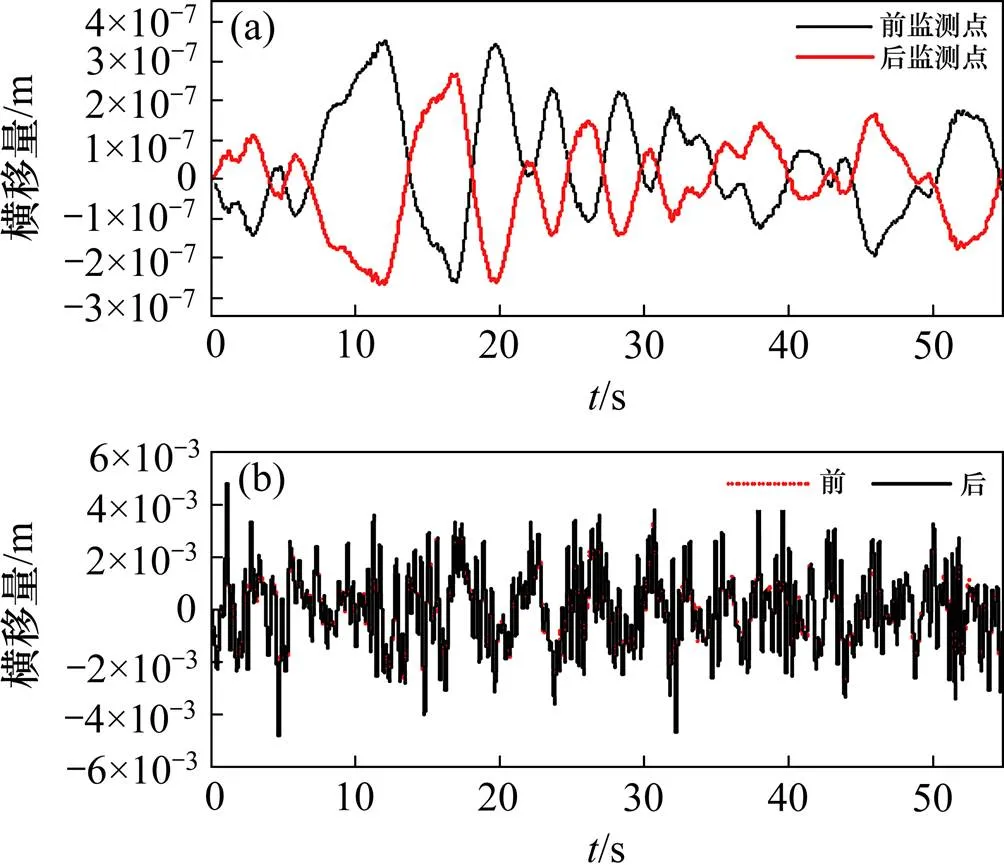
图6和图7分别对比了控制前、后以及不同LQR主动控制器对减小车体横向位移的效果。在控制器1的控制效果相对于无控制时振动有所衰减,如图6(a)所示,主要在频率为0.5~1 Hz振动峰值得到明显衰减如图6(b)所示。

(a) 车体横向位移对比;(b) 车体横向位移幅频特性
在控制器2作用下,车体振动主频带0~2.4 Hz振幅都衰减明显,尤其在振动幅值最大的0.3~0.6 Hz频率段,得到大幅降低如图7所示。
3.3 LQR控制对系统稳定性改善作用
Sperling平稳性指标是工程中评判车辆运行平稳性关键指标,表4给出了车辆在运行速度=60 m/s时控制前、后车体监测点横向振动Sperling指数,与被动控制相比,在控制器1作用时车体前后端分别优化2.05%与4.96%,在控制器2作用下平稳性改善率分别提高到11.04%与9.88%。

(a) 车体横向位移差异;(b) 车体横向位移幅频特性

表4 Sperling平稳指标改善率(v=60 m/s)
针对不同性能指标下优化后的控制器1和2作速度介于20~115 m/s时车体前后监测点处的Sperling平稳性指标,如图8所示,可知优化后的LQR控制器在提高车体稳定性方面总体都有改善作用,控制器1在不超过110 m/s速度时可以比无控制器时平稳性指标要小,但超过110 m/s时平稳性指标加速提高超过了被动悬架的,此时控制器1的引入会加剧车辆振动;在研究速度范围内利用控制器2可以大幅衰减车体振动,较大幅度地提高了车体平稳性,虽然在低速度时Sperling指数趋于平稳,但依然要比无控制及性能指标一下的控制效果好。

图8 Sperling平稳指标改善率
由此可见,性能指标的选择对改善车体运行平稳性十分关键,本文选择的2种性能指标中,指标2不仅仅重系数个数少,而且可以有效地改善车辆运行稳定性。
4 结论
1) 在轨道车辆悬架主动控制研究中,宜采用整车模型,基于简化车辆模型设计的主动控制器会出现与实际整车模型控制效果相差很大的情况。
2) 性能指标的选择对车辆悬挂优化控制至关重要,本文选取车体前、后监测点处横向加速度时域数据作为控制器输入,在较大速度范围内,设计的控制器可以很好的衰减车体振动能量。
3) 良好的主动控制器可以有效提高系统运营速度范围内稳定性,从而提高系统的鲁棒性能。
[1] 陈春俊, 王开云. 高速列车横向半主动悬挂系统建模研究及分析[J]. 振动与冲击, 2006,25(4):151−154,169.CHEN Chunjun, WANG Kaiyun. Study on modeling of lateral semi-active suspension system of high-speed train[J]. Journal of Vibration and Shock, 2006,25(4):151−154,169.
[2] 朴明伟, 郝剑华, 梁树林, 等. 高速动车组振动舒适性影响因素分析[J]. 大连交通大学学报, 2011,32(3):1−6.PIAO Mingwei, HAO Jianhua, LIANG Shulin, et al. Investigation on influential factors of high-speed trainset ride comfort[J]. Journal of Dalian Jiaotong University, 2011,32(3):1−6.
[3] Hasbullah F, Faris W F. An evaluation of LQR and fuzzy logic controllers for active suspension using half car model[J]. International Journal of Vehicle Noise and Vibration, 2010,6(2−4):200−214.
[4] Gokul Prassad S, Malar Mohan K. A contemporary adaptive air suspension using LQR control for passenger vehicles[J]. ISA Transactions, 2019, 93: 244−254.
[5] Feizi M M, Rezvani M A. Design of LQR controller for active suspension system of partially filled tank cars[J]. Structural Engineering and Mechanics, 2014,49(3):329−353.
[6] CAO X, CAO L, WANG D. The exact linearization and LQR control of semiactive connected hydropneumatic suspension system[J]. Journal of Control Science and Engineering, 2015(2015): 690917.
[7] WANG D H, LIAO W H. Semi-active suspension systems for railway vehiclesusing magnetorheological dampers. Part I: system integration and modelling[J]. Vehicle System Dynamics, 2009,47(11):1305−1325.
[8] LIU M, GU F, ZHANG Y. Ride comfort optimization of in-wheel-motor electric vehicles with in-wheel vibration absorbers[J]. Energies, 2017,10(10): 1647.
[9] 周劲松, 任利惠, 沈钢, 等. 高速列车横向平稳性主动控制规律研究[J]. 铁道学报, 2004(5):31−35.ZHOU Jinsong, REN Lihui, SHEN Gang, et al. Inter-vehicle active suspension control strategies to improve lateral riding quality in high-speed railway trains[J]. Journal of the China Railway Society, 2004(5):31−35.
[10] 张进秋, 彭虎, 张建, 等. 车辆悬挂LQR主动控制权矩阵权重参数优化[J]. 振动与冲击, 2018,37(22):214−219. ZHANG Jinqiu, PENG Hu, ZHANG Jian, et al. Weight parameters optimization for the weight matrices in a vehicle suspension LQR active control[J]. Journal of Vibration and Shock,2018,37(22):214−219.
[11] 蓝会立, 高远, 范健文, 等. 基于遗传算法的车辆4自由度主动悬架最优控制研究[J]. 合肥工业大学学报(自然科学版), 2014(11):1304−1310. LAN Huili, GAO Yuan, FAN Jianwen, et al. Optimal control of vehicle active suspension with four degrees of freedom based on genetic algorithm[J]. Journal of Hefei University of Technology (Natural Science), 2014(11):1304−1310.
[12] 王启瑞, 朱婉玲, 陈无畏, 等. 基于遗传算法和LQG控制的汽车半主动悬架结构和控制参数的集成优化研究[J]. 汽车工程, 2002,24(3):236−240. WANG Qirui, ZHU Wanling, CHEN Wuwei, et al. Integrated optimization of structure and control parameters for an automotive semi-active suspension system based on genetic algorithm and LQG control[J]. Automotive Engineering, 2002,24(3):236−240.
[13] 张国胜, 方宗德, 李爱民, 等. 基于遗传算法的主动悬架最优控制方法研究[J]. 中国机械工程, 2007,18(12):1491−1495. ZHANG Guosheng, FANG Zongde, LI Aimin, et al. Optimal control of the active suspension based on the genetic algorithm[J].China Mechanical Engineering, 2007,18(12):1491−1495.
[14] 赵彩虹, 陈士安, 王骏骋. 刚度和阻尼系数对LQG控制主动悬架控制的影响分析[J]. 农业机械学报, 2015,46(12):301−308,354.ZHAO Caihong, CHEN Shian, WANG Juncheng. Influences of stiffness and damping parameters on control of active suspension based on LQG[J]. Transactions of the Chinese Society for Agricultural Machinery, 2015,46(12):301−308,354.
[15] Kumar M S, Vijayarangan S. Design of LQR controller for active suspension system[J]. Indian Journal of Engineering and Materials Sciences, 2006,13(3):173−179.
[16] 曾京, 邬平波, 郝建华. 铁道客车系统的垂向减振分析[J]. 中国铁道科学, 2006,27(3):62−67. ZENG Jing, WU Pingbo, HAO Jianhua. Analysis of vertical vibration reduction for railway vehicle systems[J]. China Railway Science, 2006,27(3):62−67.
[17] YAN Yong, ZENG Jing. Hopf bifurcation analysis of railway bogie[J]. Nonlinear Dynamics, 2018,92(1):107−117.
Active control analysis of railway vehicle hunting motion based on LQR and genetic algorithm
YAN Yong1, ZENG Jing2, ZHAI Yujiang3, ZHANG Qing1
(1. School of Physics and Electronic Information Engineering, Ningxia Normal University, Guyuan 756000, China; 2. State Key Laboratory of Traction Power, Southwest Jiaotong University, Chengdu 610031, China;3. School of Railway Tracks and Transportation, Wuyi University, Jiangmen 529020, China)
Optimal LQR control effects of active suspension on performance index were compared by simplified and the whole vehicle model considering track irregularity respectively. The optimal LQR controller was iteratively calculated by genetic algorithm. The results show that the active control effect designed by simplified vehicle model differs greatly from that of the whole vehicle model. Furthermore, performance index is very important for vehicle suspension control. Under two performance indexes, Sperling indexes at the front and rear end of the car body decrease significantly, Besides, the car body stability is greatly improved if performance index is properly selected during a large speed scale.
vehicle hunting motion; active control; LQR control; genetic algorithm

U270.1
A
1672 − 7029(2020)10 − 2642 − 07
10.19713/j.cnki.43−1423/u.T20200013
2020−01−04
国家自然科学基金资助项目(11790282);国家重点研发计划资助项目(2016YFB1200501);江门市科技计划资助项目(2015003)
晏永(1987−),男,吉林梅河口人,副教授,博士,从事车辆系统动力学研究;E−mail:lzyanyong@foxmail.com
(编辑 阳丽霞)
