动中通关键技术研究
2020-11-16赵勇叶鑫
赵勇 叶鑫
摘要:本文结合动中通的性能特点,探讨了动中通技术在现代通信中的应用,对相关技术在其中的应用进行了较为全面的研究分析。
关键词:动中通;现代通信;关键技术
中图分类号:TN927.2 文献标识码:A 文章编号:1007-9416(2020)09-0014-02
0 引言
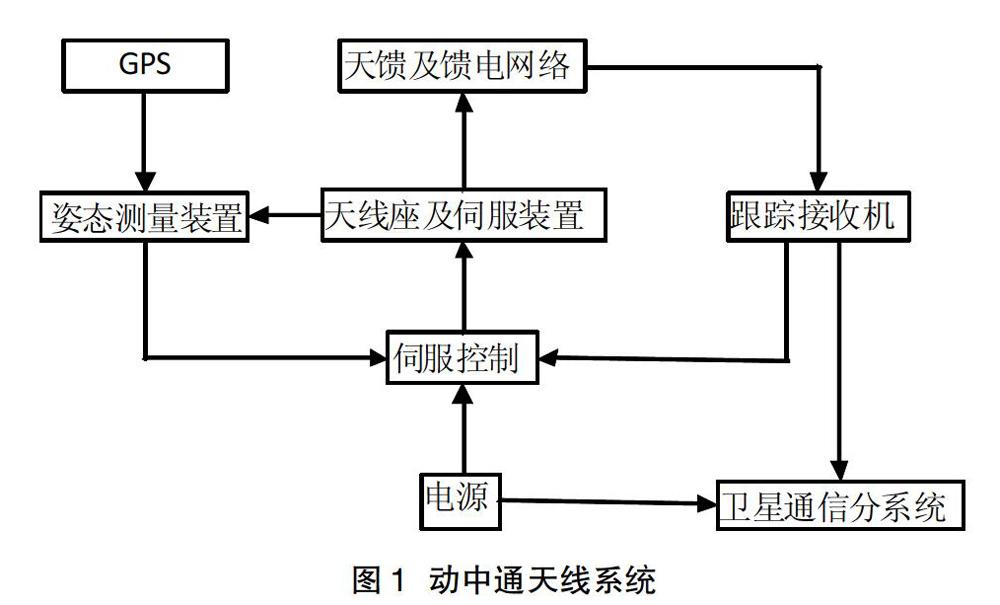
动中通是一种特殊的卫星通信天线系统,能够在车辆、舰船、飞机等载体移动过程中始终保持对准卫星,从而保证卫星通信连续不中断,系统框图如图1所示。随着移动多媒体等现代卫星通信需求和技术的发展,基于动中通技术的卫星通信系统已经在军事、应急、电信等诸多领域得到越来越广泛的应用。
1 动中通的主要特点
根据天馈技术的不同,可以将动中通分为抛物面型动中通、喇叭阵平板动中通和相控阵动中通等,根据载体的不同,可以将动中通分为车载动中通、舰载动中通和机载动中通等。
总体来看,动中通的主要特点包括:(1)指向保持:天线能够依靠指向记忆功能,在载体运动导致瞬间中断后保持精确的指向;(2)极化自动跟踪:当载体驶出盲区后能够快速跟踪卫星,恢复通信;(3)快速捕获:初始捕获和丢失信号再捕获均可在几秒钟内完成。(4)多频段:主要工作频段包括C,X/SHF,Ka,EHF等。
2 动中通关键技术
2.1 天馈原理与技术
动中通天线主要可分为几种:(1)抛物面型:可采用高效率变焦椭圆波束天线设计技术,形成抛物面或切割抛物面型的反射面,降低天线安装高度,一般采用碳纤维反射面,减轻重量,可选择陀螺、惯导等技术实现开环稳定,选择单脉冲、信标极值方式实现闭环跟踪,优点是增益高,缺点是难以做到低轮廓。(2)喇叭阵平板型:采用喇叭阵及波导合成、分配技术,形成平板型的天线面,降低天线安装高度,可采用电镀注塑工艺,减轻平板重量,选择陀螺、惯导等技术实现开环稳定,一般选择信标极值方式实现闭环跟踪,优点是增益比懸置带平板天线高,缺点是平板较厚,波导合成网络复杂。(3)固定方向型:采用收发分离的相控阵天线,三个子阵发射,一个子阵接收,综合应用INS惯导模块、GPS和AGC电平实现天线的稳定跟踪。(4)可调方向型:该型动中通有若干片接收天线和若干片发射天线,基于相控阵天线技术实现天线的空间波束合成,体积得到有效缩小,方位采用机械扫描,俯仰采用机电混合扫描,综合利用GPS、陀螺、频踪、倾角传感器等实现开环稳定和闭环跟踪,完成系统的高速动态跟踪。(5)柱面型:综合应用INS惯导模块、GPS和AGC电平实现天线的稳定跟踪。
2.2 稳定跟踪原理与技术
(1)惯导跟踪:采用开环方式,可利用激光或光纤陀螺获得天线载体的精确姿态,也可首先用中低精度惯导确定航向,再利用DGPS对航向进行精确校准,获得天线载体的精确姿态,从而控制天线准确对准卫星。利用激光或光纤陀螺获得天线载体的精确姿态,对系统精度要求较高,激光陀螺和光纤陀螺都是光学陀螺,都是基于萨格奈克效应,不同的是一个在谐振腔中传播,一个在光纤中传播。激光陀螺光在谐振腔中传播,受外界影响小,因此精度较高,但谐振腔成本昂贵。光纤成本低,但是易受温度变化造成的热胀冷缩不均以及缠绕时张力变化影响。首先用中低精度惯导确定航向,再利用DGPS对航向进行精确校准,获得天线载体的精确姿态,这种方法对惯导系统的精度要求不高,同时,DGPS的精度与基线长度密切相关,基线越长,精度越高,且在载体运动时精度较高,静止时精度较差,初始寻星时所需GPS卫星数量较多,遮挡严重时工作受限[1]。(2)单脉冲跟踪:采用闭环方式,首先,通过陀螺或电子罗盘和GPS的引导,天线能够基本对准目标卫星,之后再利用天线接收的差信号驱动天线减小误差,实现对卫星的高精度跟踪。单脉冲跟踪需要信道箱、单脉冲跟踪接收机和模耦合器,对接收机的灵敏度要求较高,天线口径小,跟踪范围在3分贝波束宽度内,如果天线受到遮挡收不到卫星信号或者因载体姿态快速变化超出跟踪范围均会导致跟踪失败,此时必须利用外部设备进行引导,恢复到跟踪范围内,才能继续实施跟踪,其系统可靠性一般。(3)信标极值跟踪:采用闭环方式,首先,通过电子罗盘和GPS的引导,天线能够基本对准目标卫星,之后再利用接收的信标信号进行运动扫描,完成天线对星,载体运动过程中,利用超前控制、专家库等技术实现对卫星的高精度跟踪。由于不需要高成本的惯导和单脉冲接收机,所以采取这种跟踪方式成本相对比较低,但系统控制较为复杂[2]。
2.3 开环与闭环相结合的测控方案
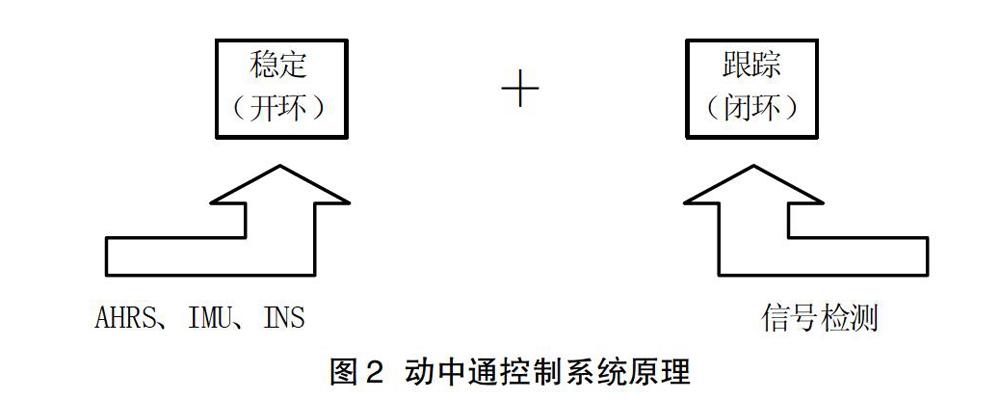
动中通的功能实现,关键在于系统实时测控的高效稳定,既要确保天线的跟踪精度,又要解决信标丢失后的天线跟踪问题,所以单独采用哪一种技术都难以满足系统的使用要求,需要综合利用上述稳定跟踪原理和技术,采用开环稳定、闭环跟踪、传感器融合的综合测控方案,既满足动中通功能实现的要求,又不依赖GPS、北斗卫星导航系统的信息,从而保持较强的抗干扰能力,其基本控制原理如图2所示[3]。
开环稳定主要是利用惯性测量组合模块获取的信息对天线进行控制,以隔离载体的瞬间扰动对天线指向的影响。通过惯性测量组合模块测量载体的角速率和线加速度,经过惯性传感器去噪、姿态估计算法和跟踪信息陀螺误差校正后,获得姿态角和角速率信息。为了对不同传感器进行数据融合,尽量克服其对姿态估计的影响,可以应用姿态估计算法,快速获取并准确跟踪陀螺零偏,同步获取准确的角速度信号。开环稳定在伺服工作的环路上主要体现为稳定环和位置环,其中稳定环的机理是隔离方程,利用组合姿态确定模块提供的角速率直接投影到天线坐标系进行补偿,保持波束在惯性空间指向稳定,位置环稳定则是由组合姿态确定模块获取的载体姿态,经坐标转换后得到天线指向角,在位置环路上实现捷联稳定。单独采用开环稳定时,惯性器件、伺服系统的漂移以及其它系统因素的影响,会导致天线波束逐渐偏离卫星波束中心,这就需要利用闭环跟踪对天线指向进行校正,从而保持天线准确地指向卫星。
3 结语
为了使动中通的性能达到最优,除采用合理的测控方案外,还可以综合加速度计和陀螺各自的优点,形成互补滤波器,使得在整个运动速度范围内,载体传感器敏感测量获得的值相对比较准确,使天线的稳定跟踪能力得到最大化保证。另外,可以根据阴影时间与基于姿态测量建立的软基准保持的精度,以自适应的方式设置搜索窗口,基于陀螺信息实现波束指向保持,在阴影状态下自适应在窗口范围内搜索卫星信标,较好地解决重捕获问题,在遮挡消失后快速捕获卫星恢复正常通信。
参考文献
[1] 王秉钧.现代卫星通信系统[M].北京:电子工业出版社,2004.
[2] 张亚男.低成本动中通测控系统姿态估计算法的设计与实现[D].成都:电子科技大学,2015.
[3] 林卫民.信息化战争与卫星通信[M].北京:解放军出版社,2005.
