基于无人机倾斜摄像技术的土地测量研究
2020-11-13曹玉琴
曹玉琴

摘要:为了探究无人机倾斜摄像技术在土地测量中的应用,首先对无人机倾斜摄影技术基本理论进行了分析;然后以我国浙江省德清市某试验区域为背景,以地籍图测量为例,对数据采集及处理和地籍图矢量化进行了介绍;最后结合RTK实地测量,对航测技术的精度进行了评定。试验及研究表明,第一,无人机摄影测绘技术具有自动化程度高、测绘高效率及耗费时间短等优点;其次,地籍图精度评定结果表明,航测技术所得精度完全满足当前我国对1:1000地籍图测量和1:500地形图测量精度要求;最后,无人机倾斜摄像技术一次性覆盖面少、相机质量低和获取的数据量巨大目前仍旧为目前航测技术推广使用中的瓶颈,有待于我们展开更多的研究来实现技术突破。
关键词:无人机;倾斜摄像技术;土地测量;精度评定
中图分类号:TP391
文献标志码:A
ResearchonLandSurveyBasedonUAVTiltCameraTechnology
CAOYuqin
(
ZhangyeLandPlanningandSurveyingInstitute,Zhangye734000,China
)
Abstract:ThispapertakesatestareainDeqingCityofZhejiangProvinceasthebackground,andtakescadastralsurveyasanexampletoexploretheapplicationofUAVtiltcameratechnologyinlandsurvey.Firstly,thebasictheoryofUAVtiltphotographyisanalyzed.Thenthedataacquisitionandprocessingandthevectorizationofcadastralsurveyareintroduced.Finally,combiningwithRTKfieldsurvey,theaccuracyofaerialsurveytechnologyisevaluated.Testandresearchshowthat,firstly,UAVphotogrammetrytechnologyhastheadvantagesofhighautomation,highefficiencyandshorttimeconsumption;secondly,theaccuracyevaluationresultsofcadastralmapshowthattheaccuracyobtainedbyaerialsurveytechnologyfullymeetsthecurrentrequirementsof1:1000CadastralMapSurveyand1:500TopographicMapSurveyinChina;finally,theUAVtiltcameratechnologyhasfewonetimecoverage,lowcameraqualityandhugeamountofdata.Atpresent,itisstillthebottleneckinthepromotionanduseofaerialsurveytechnology,whichneedsmoreresearchtoachievetechnicalbreakthrough.
Keywords:UAV;tiltcameratechnology;landsurvey;accuracyevaluation
0引言
隨着计算机和无人机等技术的迅猛发展,无人机航空摄影测量技术也逐渐被测量研究者和从业者所重视,无人机摄影测量技术也因其耗时短、人工成本低廉、可重复性强等优点而一直被视图广泛应用于土地测量中[12]。传统的土地测量是利用全站仪、RTK等测绘仪器,人工现场采集数据并配合记录现场实际物体的概况,后经内页处理,形成电子版土地信息[3]。尤其在地籍图测量中,完成一次全国性的地籍图测量,采用传统的方法需要耗费大量的人力和物力,而且受移动速度、透视环境、接受信号等限制,人工测绘的速度及其有限,实际的地籍图变化情况很难得以及时更新[4]。对比之下,无人机摄影测绘技术因自动化程度高而带来的高效率、短周期且能获得三维数据等特点在土地测量中凸显出了更具使用前景和研究的价值[56]。为此,本文以浙江省德清市某试验区域为背景,以地籍图测量为例,对基于无人机倾斜摄像技术的土地测量技术展开研究,旨于为无人机倾斜摄像技术在土地测量中加速推广使用提供理论和技术支持。
1无人机倾斜摄影技术理论
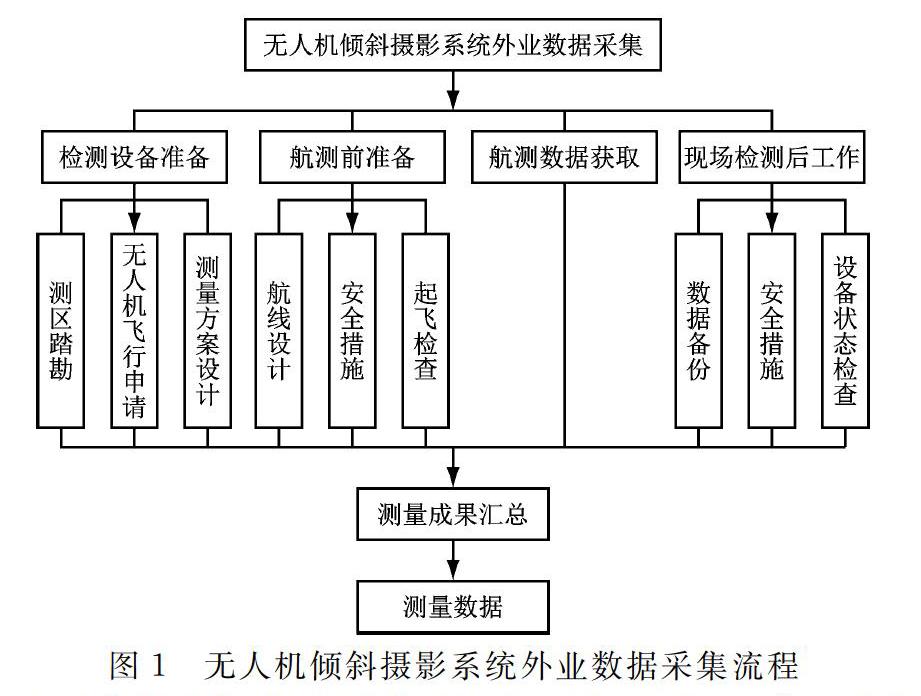
无人机倾斜摄影系统作业数据采集流程如图1所示。
无人机倾斜摄影系统外业数据采集流程,主要包含检测设备进场、航摄前准备、航测数据获取及航测后作业等4个方面[7]。因为现在飞行器不允许随便飞行,随意航测前应先对测区踏勘,出具初步航测设计方案并就航测飞行区域向相关部门提交申请,上述即为航测设备进场作业[8]。航测前准备工作包括航线设计,航测过程中既有设施、设备及人员和机器安全保护措施,及飞行器起飞前的检查工作。航测准备工作完成后即可执行航测过程,航测后需要对数据备份并保障测量数据安全,然后确认相关设备设施的安全且没有损坏。至此,一次航测作业完成,以下对无人机倾斜摄影的基本原理及数据采集进行简要介绍。
1.1基本原理
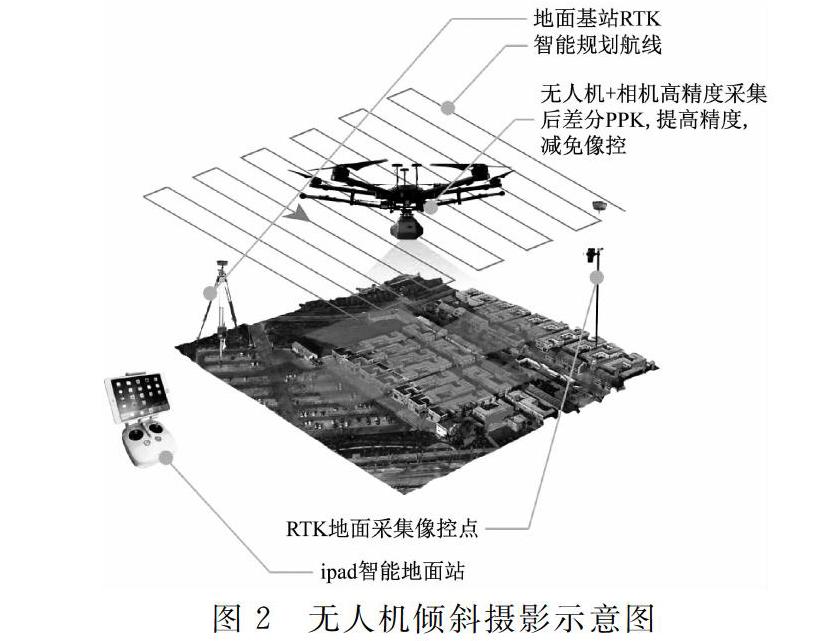
无人机摄影测量是通过将摄像机搭载在无人机上,综合无人机的飞行功能和摄像机的摄像功能来完成摄像的过程。为了保证精度和摄像范围,一个无人机上往往搭载多个摄像机,搭载过程中摄像机的光轴与铅锤方向有一定夹角,因此也称之为无人机倾斜摄影,对于常用的5个摄像机的设备,一般搭设下视、前视、后视、左视和右视摄像机,其中下视为铅锤视角,其余4个视角与铅锤视角间夹角可在15°~45°之间进行调整[910]。无人机上搭载的一般为PostProcessingKinematic(PPK,GPS动态后处理差分)其精度完全满足土地测量的需求,而RealTimeKinematic测量系统,虽然精度高,但目前尚无法满足无人机高速飞行状态下的位置记录,为完成试验数据验证,本文采用RTK配合无人机校准测量区域坐标,如图2所示。
选定试验区域为我国浙江省德清市某地块,选定区域面积为600m×400m,区域内无高大树木和建筑,且没有变电站等强磁场区域。
多视角摄像机通过时间核准其采集的图像,配备相应的计算机系统控制多台摄像机同时触发摄像功能,集中采集土地信息数据并同步[11]。同时无人机摄像设备自带的姿态测量装置获取每一个摄像机的姿态参数,并将姿态参数与土地测量信息同步储存起来,以供后续数据处理,得到真实的土地测量信息[12]。
1.2数据采集
本文以本次所采用的六旋翼五相机无人机搭载倾斜摄影相机(以下简称相机)为例,对其数据采集过程进行介绍。该相机具备铅锤和前后左右共计5个影像采集相机,最高飞行高度280m(自其起飞点计算),最大分辨率和最小曝光间距分别为0.02m和5s,相机总像素超18千万像素,5个相机镜头均采用28mm/F2.4(等效焦距)。4个非铅锤视角和铅锤视角之间的夹角均可以可在15°~45°之间进行调整,相机实物图如图3所示。
本次数据采集过程中,相机夹角选择40°,纵向重叠和横向重叠度分别为80%和60%,航飞高度200m。
2无人机倾斜摄影数据处理
根据现场实际情况,首先确定测区并在测区内确定最高和最低海拔高度及测区平均海拔高度,以确定航线及起测点,数据获取流程见图1所示。无人机5个相机的数据分别储存在5个文件夹下,获取数据后首先检查摄影区域的重叠度,对于不满足预设需求的进行补测,以正射视角相机的时间参数校准其余4个相机所采集的数据,并将其连接在一起进行处理,对于时间参数不一致的数据进行删除,以保证最终留下的相片与坐标点、经纬度等参数(POS参数)能够一一对应[13]。
航测所得数据处理流程如图4所示。
外业数据获取后的数据处理流程,此次土地信息数据处理软件使用当前使用较多的Smart3Dcapture。该软件既能在静态影响处理中使用,还可以在摄像机中获取视频帧,在ContextCaptuerMaster模块内新建工程,然后通过空中三角测量计算得到基于实际土地信息的点云并在这些高密度点云的基础上,通过时间等参数对不同文件夹下的影像数据进行关联并计算,最终得到影像图生成数字化地表模型、正射影像图及全景三维模型。精度评定如表1所示。
3地籍矢量化及精度评定
模型在三维平台上展现的正射影响效果如图5所示。
不同视角下全景地表模型图如图6(a)(b)所示。
航测和计算所得的全景真实地表模型,其中图5为模型在三维平台上展现的正射影响效果,图6(a)为40°俯视效果图,图6(b)为其局部放大效果图。由图可见,通过对不同视角图像的操作,我们便可以获得测区内地表信息的细部特点。
Smart3Dcapture软件在基于现场航测所得信息建模时已经通过航测控制点和RTK测量所得的真实坐标进行过核对,所以计算所得的三维虚拟模型与真实地表信息误差在我们允许范围内,可视为虚拟模型与真实信息具备一致性。本文给出局部基于三维模型绘制的二维矢量地籍图,如图7所示。
图7中所标记的红点即为精度验证标记点,红色线条为地表建筑物及测区内主干道边界线。鉴于航测所得的三维虚拟模型与真实地表信息误差完全在地籍图测量的误差允许范围以内,因此当获得三维全景模型后,结合所得数据,我们可以很块地确定测区内地籍图测量所需信息。
综上所述,因为在误差允许范围内,虚拟模型与真实信息可视为具备一致性,因此对地籍图测量的准确性可以借助于对三维模型准确度评价进行表征。本文选取图7所示的5个精度验证标记点为例,采用RTK对其进行现场实测。精度评定结果如表2所示。
4总结
本文以浙江省德清市某试验区域为背景,以地籍图测量为例,通过对无人机倾斜摄影技术基本理论、数据采集及處理和地籍图矢量化及结合RTK的精度评定的研究,对无人机倾斜摄像技术在土地测量中的应用进行了研究,得到主要结论如下:
(1)无人机摄影测绘技术因自动化程度高而带来的高效率、短周期且能获得三维数据,通过软件计算便能获得准确的土地信息,避免了传统测量方法耗时耗力的弊端,具备极大的推广使用价值;
(2)地籍图精度评定结果表明,无人机摄影测绘技术所得精度完全满足当前我国对1:1000地籍图测量和1:500地形图测量精度(分别为0.05m和0.1m)的要求;
(3)虽然无人机摄影测绘技术有诸多优点,但其一次性覆盖面少、相机质量低和获取的数据量巨大仍旧为目前航测技术推广使用中的瓶颈,有待于我们展开更多的研究来实现技术突破。
参考文献
[1]
朱国强,刘勇,程鹏正.无人机倾斜摄影技术支持下的三维精细模型制作[J].测绘通报,2016(9):151152.
[2]王明,李丽慧,廖小辉,等.基于无人机航摄的高陡/直立边坡快速地形测量及三维数值建模方法[J].工程地质学报,2019,27(5):9991008.
[3]资新运,耿帅,赵姝帆,等.数字工业摄像技术用于转轴动态扭矩测量原理的研究[J].中国激光,2015(2):230236.
[4]冯威.高寒高海拔复杂艰险山区无人机勘察技术应用[J].铁道工程学报,2019(8):913.
[5]刘永吉,任伟,孙喜彬.基于倾斜摄影测量技术的曲面建筑立面图测绘方法[J].建筑技术,2019(5):605607.
[6]毕凯,黄少林.无人机航测技术在农村土地调查工作底图制作中的应用[J].国土资源遥感,2016,28(2):149153.
[7]胡同喜,牛雪峰,谭洋,等.基于SURF算法的无人机遥感影像拼接技术[J].测绘通报,2015(1):5558.
[8]BMMiller,KVStepanyan,AKPopov,etal.UAVnavigationbasedonvideosequencescapturedbytheonboardvideocamera[J].Automation&RemoteControl,2017,78(12):22112221.
[9]张宁,杨润书,甘淑.无人机航测技术针对山区高速公路带状测区的应用研究[J].公路,2018(7):245249.
[10]HironoriTotoki,YoshimasaOchi,MasayukiSato,etal.DesignandTestingofaLowOrderFlightControlSystemforQuadTiltWingUAV[J].JournalofGuidanceControl&Dynamics,2016,39(10):18.
[11]赵燕伶,洪增林,付垒.无人机遥感技术在土地违法监测中的应用研究[J].矿产勘查,2019,10(4):976983.
[12]于强强,茹乐,于云龙,等.基于网络编码的无人机数据链技术研究[J].计算机测量与控制,2015,23(7):25632565.
[13]潘银松,刘天刚,马泽忠,等.基于MS5611的小型无人机高度检测系统设计[J].电子测量技术,2015(7):2226.
(收稿日期:2020.03.11)
