高速公路苜蓿叶型立交环形匝道侧滑事故仿真研究*
2020-11-13李诗佳窦同乐
李诗佳 窦同乐 徐 进,2▲
(1.重庆交通大学交通运输学院 重庆400074;2.重庆交通大学山区复杂道路环境“人-车-路”协同与安全重庆市重点实验室 重庆400074)
0 引 言
随着汽车保有量的上升,高速公路交通事故急剧增加,互通立交区域成为了交通事故高发区。以G93成渝环线高速公路宜宾至泸州段为例,2017年—2019年10月主线和互通(含收费站)发生交通事故总计733例,其中互通立交(含收费区域)发生事故255例,占总量34.78%,白鹤林枢纽互通发生事故67例,占全线交通事故总量的9.14%,占互通立交事故总量的26.27%。互通立交的事故多发点主要集中在匝道路段和出口三角区,其中前者与驾驶人不合理的速度选择行为有关,后者与指路信息不明确有关。高速公路由于主线速度较高导致车辆驶出主线进入匝道后的速度仍维持在较高的幅值,而匝道的线形指标远低于主线,使得匝道上的行驶车辆稳定性劣化,更容易发生事故。与入口匝道相比,出口匝道(从高速公路主线驶出后进入的匝道)的事故风险更高。
关于互通立交的运行特性,崔强[1]、徐进等[2]开展了几类典型城市立交的实车驾驶实验,基于自然驾驶数据对立交匝道以及连接部位的行驶速度特性和纵向加速度进行了分析,确定了互通立交进/出口加速长度和减速长度的起止点分布。徐进[3]通过实车试验采集了自然驾驶下环形匝道的行驶速度和横向加速度数据,对上下行匝道速度变化趋势,横向加速度均值、峰值进行了分析;林伟[4]通过实车路试采集了互通立交匝道的驾驶数据,分析了几类立交匝道的横向运行特性,得到了匝道横向加速度和车道使用的统计特性。徐进等[5-6]获取了螺旋匝道的自然驾驶数据,分析了螺旋匝道的速度和横向加速度特性。Farah等[7]使用无人机悬停在高空拍摄了互通立交匝道的视频,提取了匝道的车辆行驶速度,并确定了大型车和小客车的速度模式。Beinum等[8]用同样的手段提取了互通立交区域内的车辆运行轨迹,分析了立交匝道以及交织区的驾驶行为模式。
仿真手段广泛被应用于曲线路段的运行特性分析与评价,之前主要应用在山区道路主线路段[9-11],近年来开始应用于互通立交匝道。刘晨[12]利用Carsim 对公路线形评价指标及方法进行研究;李平[13]通过Trucksim对弯道路段半径、超高、道路附着系数等对弯道安全速度阈值进行研究;窦同乐等[14-15]运用Trucksim/Carsim 软件进行不同类型互通立交的车辆行驶仿真,基于仿真输出的车辆横向/竖向/纵向加速度对匝道行驶舒适性进行了分析。王晓玉[16]利用多个车辆稳态响应指标建立评价体系,使用Carisim开展行驶仿真实验,利用建立的评体系对匝道运行进行了安全评价。吴初娜等[17]基于Trucksim行驶仿真实验结果,以横向侧偏量和轮胎垂直荷载转移率研究了客车在弯道超速行驶对横向稳定性的影响。
综上,目前实车驾驶试验主要是获取自然驾驶数据,然后进行驾驶行为特征和车辆运行状态分析,但无法得到临界状态数据,无法用于事故风险分析。基于行驶动力学仿真的手段虽然应用在互通立交匝道的运行过程模拟,但现有的研究并未对涉及事故匝道的形成机制。基于此,为了揭示高速公路枢纽互通立交的事故形成机制,本文以宜泸高速白鹤林枢纽互通为研究对象,在Carism 软件环境下建立高速公路主线、连接部和匝道的三维数字模型,模拟在不同超速程度、减速起点位置、道路附着系数下,小客车从高速公路驶入匝道的完整运行过程,对苜蓿叶型匝道上的车辆侧向失稳事故进行微观分析研究。
1 仿真方法与模型
1.1 研究对象
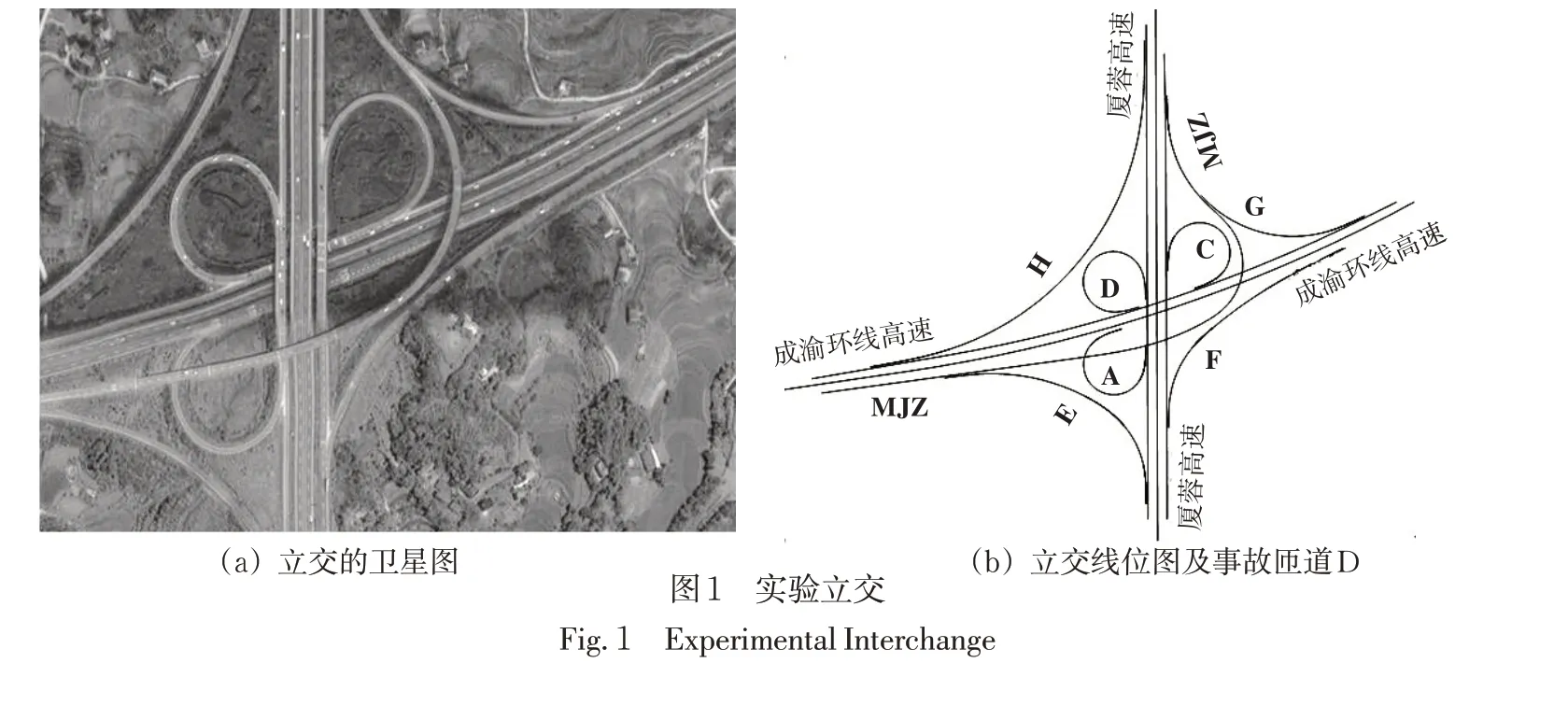
以宜泸高速公路白鹤林枢纽互通为研究对象,该互通的样式为半苜蓿叶型半定向型立交,位于四川省泸州市纳溪区境内,见图1(a)。该互通连接宜泸高速公路与隆纳高速公路(夏蓉高速公路的一部分)。2017 年至2019 年10 月期间,发生交通事故共计67 例,其中发生在匝道(匝道D)的事故数33例,约占总量49%,事故形态均为车辆与匝道外侧护栏发生碰撞,因此D 匝道为该枢纽立交的事故高发匝道。
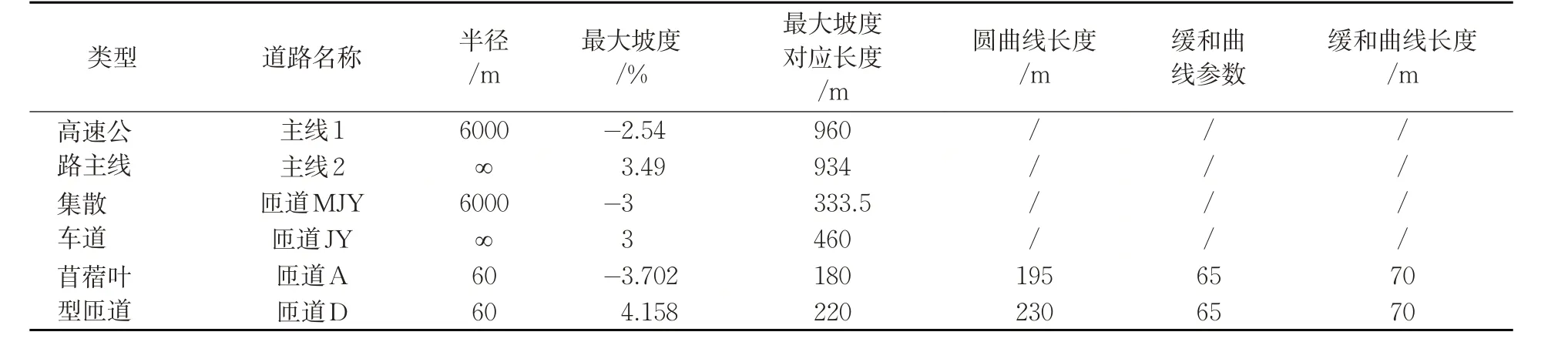
表1 仿真道路的线形参数Tab.1 Alignment parameters of the simulated roads
1.2 仿真方法
根据白鹤林主线及匝道的设计参数,通过CAD软件对仿真道路进行平面线形、道路纵断面、道路超高加宽设计,之后将纬地软件复现后的立交数据导入到Carsim 道路模型中,完成仿真互通立交在Carsim 软件里的三维建模。然后,在Carsim 中完成车辆建模及仿真工况设置;再进行车辆在高速公路上由主线到匝道的行驶过程模拟。
1.3 道路建模
在Carism 仿真软件中对白鹤林互通中包括事故匝道在内的6 条路径进行仿真复现,将其命名为主线1、主线2、MJY 匝道、JY 匝道、匝道A、匝道D(事故匝道),见图2;其中MJY 匝道与JY 匝道是集散车道,匝道A 和匝道D 是2 条线形相似的右转小半径匝道;主线1与MJY匝道为大半径曲线路段,车辆在该路段行驶的动力学响应类似直线行驶响应状态;由于主线1 与MJY 匝道,主线2 与JY 匝道线形条件相似,车辆在集散车道行驶的动力学响应与主线相同,故研究中,将车辆由集散车道到匝道再到集散车道的换线过程,视为车辆由主线到匝道再到主线的换线过程进行研究。
在仿真实验中,以道路中心线为参考路径,对每一条路线在系统中进行path-ID命名;通过设置事件Event 进行仿真车辆的转向控制。互通立交行驶的本质是线路转换,当车辆行驶到切换线路前的某一站值时,通过触发Event,系统调用线路Path-ID实现车辆在2 条线路之间的转换,同时将新线路的站值赋给sv_sta_road,以此满足仿真车辆在换道后的行车条件。

表2 仿真线路的ID 命名Tab.2 ID name of route in driving simulation
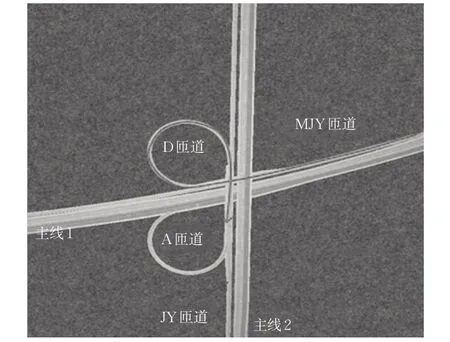
图2 仿真道路及行驶路径Fig.2 the simulated road and the target path
1.4 车辆模型
结合白鹤林互通立交的交通组成、事故车型分布、以及不利原则等因素,选取SUV 作为仿真车型。SUV具有较大的整车质量和较快的行驶速度,且重心位置与三厢车对比更高,更容易发生行驶失衡导致交通事故,事故后果相对于三厢小轿车更严重。试验使用Carsim软件自带的SUV整车模型,包含车体、传动系、转向系、制动系、轮胎及空气动力学等7大系统。
1.5 仿真工况
为了得到白鹤林互通立交事故匝道的发生机制,本文设置3 种仿真工况进行事故匝道的驾驶仿真虚拟实验,具体如下。
工况一:道路附着系数为0.6,速度控制采用恒定目标速度行驶,根据匝道行驶速度的实测值分布,在匝道限速40 km/h 的基础上使车辆分别在超速0%,20%,50%,70%的条件下,按照仿真路线恒速行驶,完成仿真实验,以研究不同超速程度下车辆在匝道行驶的安全性。
工况二:道路附着系数为0.6,采用恒定目标速度和速度预测2种控制方式。车辆在行驶至某站值前,采用恒定目标速度,达到该站值时触发事件Event,切换为速度预瞄控制。速度控制切换点设置在匝道入口附近,在速度预瞄控制下车辆会减速制动,控制方式切换点即车辆减速起点。
工况三:车辆速度控制采用恒定目标速度,改变路面附着系数μ逐次进行虚拟行驶仿真,μ值分别为0.3,0.35,0.4,0.45,0.5,0.55,0.6,0.65,车辆依次以超速0%,20%,50%,70%的恒定速度进行仿真实验,分析不同气候条件下,匝道路面抗滑性与车辆行驶安全性的关系。
2 匝道超速行为对侧滑的影响
汽车侧滑是小半径匝道的常见事故形态,侧向加速度ay和横摆角速度ω 可以用来表征车辆在小半径弯道上的行驶稳定性。以横向加速度ay来表征行驶稳定性/驾驶舒适性时,其阈值为[18]:ay<1.8 m/s2,稳定性/舒适性较好;1.8 m/s2<ay<3.6 m/s2,稳定性/舒适性一般;3.6 m/s2<ay<5 m/s2,稳定性/舒适性较差;5 m/s2<ay,非常不稳定/不舒适。横摆角速度ω 与横向加速度ay之间的关系为:根据侧向加速度ay的阈值,以及事故匝道D的限速值40 km/h,计算出横摆角速ω的阈值,见表3。
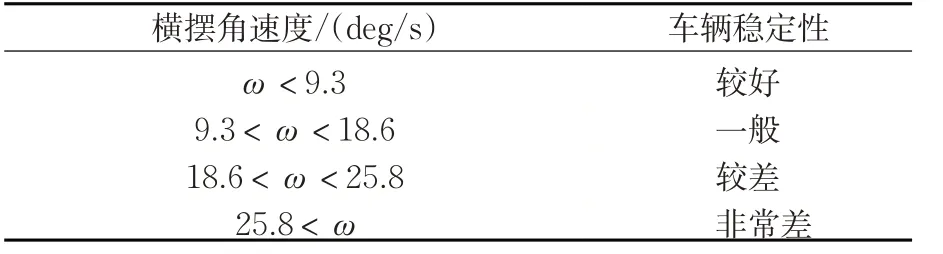
表3 横摆角速度与车辆稳定性的关系Tab.3 Relationship between yaw rate and vehicle stability
峰值附着系数是指车辆4个车轮上法线上所受的侧向力与竖直方向的垂直力比值绝对值中的最大值[8],表达式见式1,能够作为衡量车辆侧滑安全性指标;当路面附着系数μ 小于临界值时,行车安全;当μ 大于临界值时,行车危险;当μ 等于或接近临界值时,车辆发生侧滑。
式中:μ( z )为峰值附着系数;Fyi(z)为轮胎侧向力;Fzi(z)为轮胎垂直力,i=L1,L2,R1,R2,分别表示左前轮、左后轮、右前轮、右后轮。
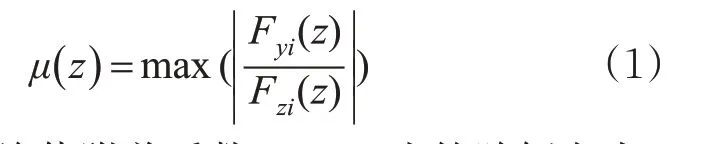
以40 km/h(匝道限速值)为基础车速值,根据匝道测速结果的分布区间使车辆以超速0%,20%,50%,70%完成从高速主线到匝道D 的定速行驶,即仿真速度为40 km/h, 48 km/h, 60 km/h,68 km/h。从仿真输出结果提取出车身侧偏角、横向加速度、轨迹坐标等汽车运行参数,然后计算出轨迹横向偏移量、横摆角速度、峰值附着系数等指标值得连续量,见图3。
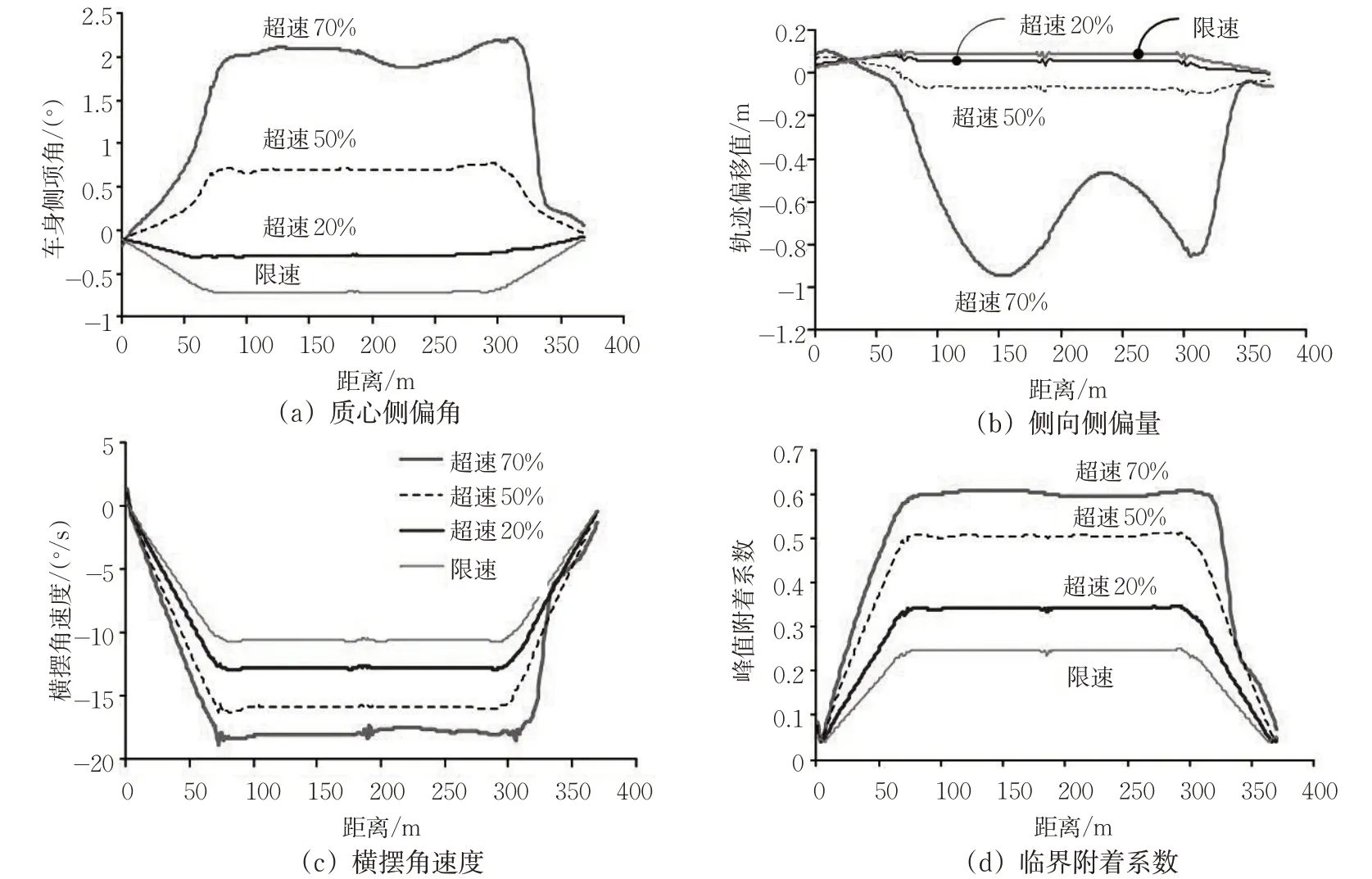
图3 不同超速程度下的匝道D车辆运行状态Fig.3 Vehicle running status under different overspeed on ramp D
由于匝道设置了超高(横坡),超速50%以上时车身超曲线外侧倾斜(图3(a)),而以限速值或超速20%行驶时车身轻微超曲线内侧倾斜,但倾斜幅度均很低。受轮胎侧偏特性的影响,当车轮承受的侧向力过大时,车辆行驶轨迹向弯道外侧偏移,使得车辆的偏移目标路径,在图3(b)中,超速程度小于等于50%时轨迹横向偏移量很低。当超速70%时,横向偏移量显著增加至并有较大波动最大值为0.95 m,已经致使车辆越出车道线,即车辆已经处于不安全状态。在图中,车辆按限速值或超速20%行驶时,侧偏量曲线值大于0,即轨迹向弯道内侧有轻微偏移,这是因为横向侧偏量是车辆质心相对于目标路径的侧偏量,匝道超高使车辆质心朝弯道内侧偏出。
图3(c)是车辆的横摆角速度曲线图,横摆角速度随着超速程度的增加而不断增大,表明车辆随着速度的增加,行驶稳定性越来越差。图3(d)是不同超速程度下车辆在匝道行驶时的峰值附着系数,峰值系数与超速程度呈正相关关系,超速50%,峰值系数有较大增量,但仍低于路面附着系数;超速70%时峰值系数已经超过路面附着系数,即轮胎与路面之间已经发生了侧滑。由此可见车辆在超速幅度低于20%时,风险较低,不会在匝道事故段发生侧滑;当超速70%行驶,横向侧偏量过大且轨迹侧偏值不稳定,车辆已经发生侧滑。
图4给出了超速50%和70%这2种工况,车辆在匝道行驶过程中轨迹横向偏移量达到最大值时的仿真画面,在图(b)中车辆轮胎已经超过弯道外侧路缘线,即车身已经偏离行车道。
3 不同减速点对侧滑的影响
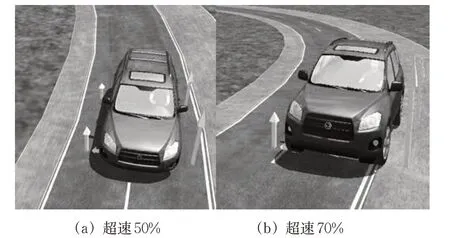
图4 最大侧向偏移处车辆行驶状况Fig.4 Vehicle driving condition at maximum lateral offset
在实际驾驶中,驾驶员进入匝道曲线路段时会在曲线之前开始减速。驾驶员开始减速操作的起点位置对车辆行驶稳定性存在显著的影响。为了研究分析二者之间的关系,使车辆以超速70%恒速行驶至各减速起点,然后切换速度控制模式,模拟车辆在不同减速起点开始减速操作的匝道行驶场景。车辆在进入匝道圆曲线前,主要在缓和曲线(长度为70 m)和之前的直道上进行减速,为此,减速起点位置见表4。
车辆曲线行驶时,轮胎与地面之间存在附着力,其值见式(3),在路面附着力系数维持稳定时,附着力的大小是一定的。根据行驶方向,附着力含纵向的驱动力/制动力,以及侧向力2 个部分,一个方向力的增大必然导致另一方向力的减少。以车辆在曲线路段制动为例,当车辆在高速下制动时,纵向上需求的制动力大,侧向上无法提供足够的力来抵消离心力,车辆进入侧滑甩尾的危险状态[19]。

式中,μ 为道路附着力系数;Fx为车辆纵向上的驱动力或制动;Fy为车辆法向上的侧向力。
图5(a)是仿真输出的不同减速起点位置对应的车身横摆角速度曲线,减速起点5~8 曲线超过稳定性阈值,其中减速起点5和6的侧向稳定性较差,减速起点7和8的侧向稳定性则非常差。图5(b)为不同减速起点下车辆在匝道路段的侧向偏移曲线,减速起点1~4的侧向偏移量为0,表明车辆没有侧滑;减速起点5~8 的轨迹偏移值曲线发生了较大的波动,表明车辆在仿真实验中发生了侧滑,且随着减速起点后移,车辆侧滑更加严重。不同减速起点下的轨迹偏移量峰值见表5。车辆侧滑行驶状态见图6,驾驶人采取的减速操作越晚,轨迹偏离行车道越严重。为此,驾驶人在进入匝道曲线路段之前内应尽早采取制动措施,保证足够的制动距离,以提高行车安全性。
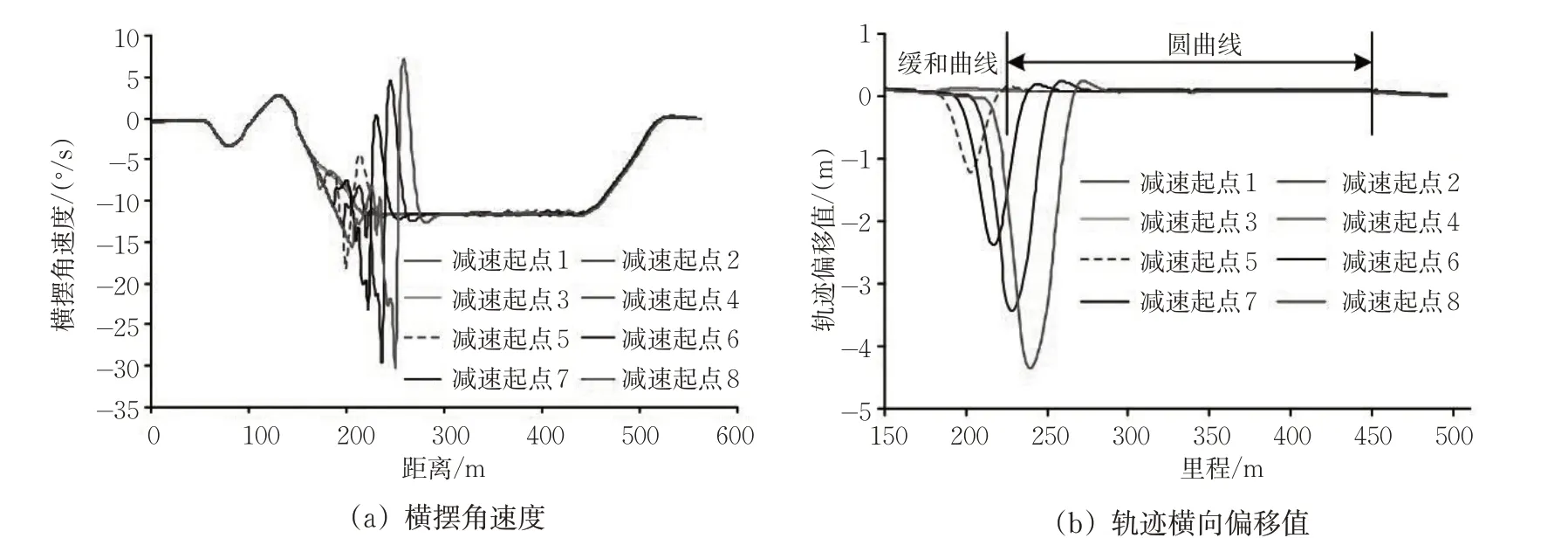
图5 不同减速起点进行制动时的汽车运动学响应Fig.5 vehicle dynamic response when driver brake at different deceleration start points

表4 减速起点与匝道起点的位置关系Tab.4 Position relationship between deceleration start point and ramp start point

表5 不同减速起点车辆的最大横向侧向偏移量Tab.5 Maximum lateral offset of vehicles for different starting points of deceleration
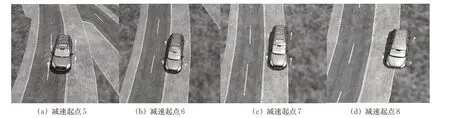
图6 最大横向偏移处车辆侧滑状态Fig.6 Vehicle sideslip at maximum lateral offset
4 路面附着系数对侧滑的影响
为了分析路面湿滑对行驶稳定性的影响,在仿真中将路面附着系数μ 分别设置为0.3,0.35,0.4,0.45,0.5,0.55,0.6,0.65,以模拟降雨天气时车辆在湿滑匝道路面上的行驶过程;同时,也将行驶速度作为实验变量。车辆在超速70%时,仅能在附着系数为0.65的匝道上完成仿真实验;在超速50%条件下,当道路附着系数为0.5 时,车辆在匝道内侧滑,但仍能完成实验;μ=0.45 时,车辆侧滑至匝道外侧无法完成实验;在超速20%时,车辆能完成绝大部分仿真实验,但μ 为0.35时车辆会发生侧滑;不同超速程度下完成的行驶仿真实验见表6。
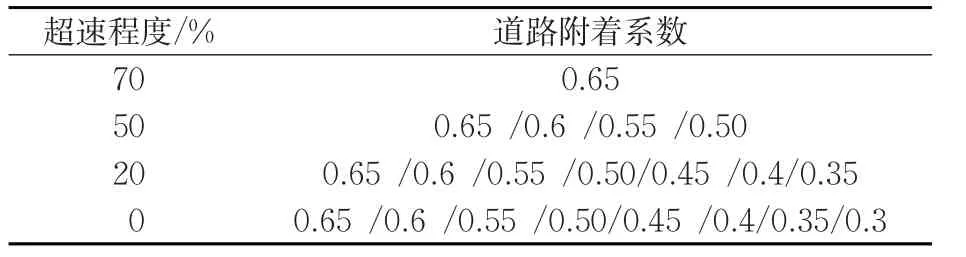
表6 不同超速程度下完成的路面附着系数实验Tab.6 Adhesion coefficient driving test completed under different overspeed

表7 不同附着系数下的最大横向侧偏量Tab.7 Maximum lateral offset under different adhesion coefficients
车辆在曲线路段行驶时,地面给车轮一个反向作用力来抵抗侧偏力。当车轮有侧向弹性时,由于侧向力的存在,车轮行驶方向将偏离目标路径。车轮滚动时,车轮接地印迹中心线与车轮平面方向的夹角即轮胎侧偏角[19],侧偏角的幅值主要受横向力的影响。当车辆正常行驶时,横向加速度ay不超过4 m/s2,轮胎侧偏角不超过4°~5°,且ay与侧偏角成线形关系;当ay超过4 m/s2时,轮胎侧偏角会进入非线性变化区间,轮胎侧偏特性发生显著变化,角度急剧变化,使得车辆不能进行正常的圆周运动,车辆转向半径迅速变化,即车辆发生侧滑。为研究路面附着系数对车辆匝道行驶侧滑性的影响,以超速50%为例,提取不同附着系数道路下的轮胎侧偏角进行分析。
当车辆存在转向不足特性时,驾驶员需要增加转向盘转角以弥补不足转向;而当速度增大时,转向不足会被放大,需要再进行额外的转向角度补偿。图7 给出了2 种路面附着系数条件下车辆轮胎的侧偏角曲线,在“缓和曲线-圆曲线”衔接位置(YH点和HY点)侧偏角会产生波动,路面附着系数越低越明显,这是由于目标路径(也就是车道中心线)的曲率变化率在YH和HY点处存在突变所致。此外,前轴轮胎的侧偏角幅值要显著高于后轴轮胎。

图7 轮胎侧偏角曲线Fig.7 Tire slip angle curve
图8 给出了前轴轮胎侧偏角与路面附着系数之间的关系,附着系数越低,各轮胎侧偏角越大。在μ为0.55~0.65 之间,侧偏角最大的右前轮的极值小于4°,表明车辆未发生侧滑。当μ=0.50 时,前轮侧偏角较μ 为0.50时显著增加,右前轮侧偏角超过5°,左前轮接近5°,车辆在该附着系数下的最大横向侧偏量为0.42 m,表明此时车辆在圆曲线入口位置发生了侧滑。因此,为保证匝道行车安全,应加强匝道排水避免路面积水,同时应加强速度管理,避免出现超速50%及以上的高速驾驶行为。
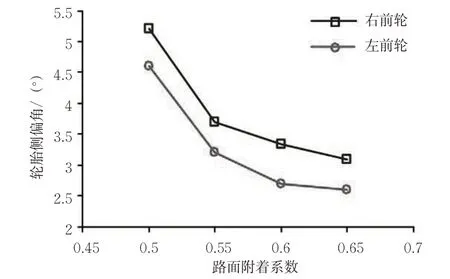
图8 不同附着系数下的前轮最大侧偏角Fig.8 Maximum slip angle of front wheel under different adhesion coefficients
5 结 论
环形匝道是一类事故高发匝道,为得到环形匝道的事故发生机制,以宜泸高速公路白鹤林枢纽互通对象,在Carsim 软件环境下建立该互通的三维模型,改变汽车行驶工况和运行条件,进行极限状态下的行驶模拟;仿真试验为单车试验,试验中车辆行驶没有受到交通流和交通信号的影响,与车辆实际行驶情况存在差异;由于研究主体是车辆不同超速程度、匝道减速起点位置、道路附着系数与侧滑的相关性,交通流和交通信号对其的影响程度较小;因此,仿真结果对于实际情况仍有一定的参考价值。主要结论如下。
1)超速行驶对车辆匝道行驶稳定性及车辆侧向偏移量有显著影响,不同超速程度对车辆匝道侧滑的风险性有明显差别,车辆在匝道行驶时应降低行驶速度至安全速度范围内。
2)车辆匝道行驶超速20%,在较差的道路条件下(路面有积水、浮雪、霜等),也可以安全行驶,车辆侧滑的风险较低;行驶超速50%,车辆在稍差的道路条件下(路面湿润),可以完成行驶,存在较高的侧滑风险;超速70%,即使在干燥路面(路面附着系数0.65)行驶也一定会发生侧滑。
3)车辆超速进入匝道时,驾驶员减速操作的起点位置对侧滑存在较大影响,减速起点距离匝道圆曲线越近侧滑危险性越大。
4)道路附着系数大小影响车辆侧滑性,超速程度越高,道路附着系数对车辆侧滑影响越大;车辆发生侧滑可能性随道路附着系数的减小而增大。
仿真试验只选取SUV车型进行分析研究,不能完全反映其他小客车车型在环形匝道侧滑情况。在下一步的研究中,可选取多种车型进行仿真试验比较分析,或以不同的驱动方式(前驱、后驱、四驱)进行环形匝道侧滑研究分析。
