一个新发现:“中等驾驶人”在微观交通世界中的存在性实证*
2020-11-13潘存书符经厚王郸祁
徐 进 潘存书 符经厚 王郸祁 刘 俊
(1.重庆交通大学山区复杂道路环境“人-车-路”协同与安全重庆市重点实验室 重庆400074 2.重庆交通大学交通运输学院 重庆400074)
0 引 言
一直以来,人的行为举动被认为是复杂、离散、随意的,预测人的行为——不管是个体行为还是群体行为均十分困难,甚至被认为是不可能的,因为人的行为是大脑决策的结果,而现在对于人脑及脑神经的了解还不够深入[1-2]。预测人类行为的几个必备的前提是:人类的行为是否存在规律, 基于抽样数据得到的统计结果与个体之间是否存在对应关系[3-4], 从一个人过去的行为是否可以推断他的未来?[5]
在交通世界中,人的行为在宏观层面表现为出行行为和交通方式的选择[6],当选择小汽车作为交通工具时在微观层面则表现为驾驶行为[7],即驾驶员控制汽车沿道路行进。汽车的运动学行为是人类在驾驶车辆时,车辆对驾驶人操纵行为的响应,其中行驶速度是车辆对速度控制操作(油门和制动踏板、档位等驾驶操作)的响应,而操纵行为来自于驾驶人接受道路环境信息之后的决策,因此汽车行驶速度在本质上是驾驶人行为的某种反映和呈现。
在设计道路和交通设施时,通常以中等驾驶人的行为作为设计依据,比如以中等驾驶人的行驶速度(即设计车速)作为几何线形参数的控制依据[8-10]。而“中等驾驶人”显然是一个抽象的概念,是一个统计意义上的驾驶人,即驾驶行为表征参数中的中位数,由此产生一个问题:即“中等驾驶人”在真实世界中是否真的存在?道路是一个带状结构物,驾驶人操纵汽车在道路上行驶是一个连续的时空移动过程。以速度为例,将一段道路分成M 个节段,得到M+1 个横断面,每个横断面测99 辆车的速度,速度中位数即50th百分位的速度实测值,假设驾驶人甲在断面i 的速度值为中位数,即在i 断面,甲是中等驾驶人,那么在i+1,i+2,…,i+n 断面甲是否还是中等驾驶人?如果是,表明人的交通行为具有连续性,那么交通行为是可以预测的,如果不是,预测交通行为显然是不可行的或者是无效的。(做一个类比:随机抽取99 位8 岁女孩并测量身高,中位值即第50位身高是女孩贾某;第二年同一时间还是测量这99 名的身高,中位值是否是贾某,还是别的女孩;那么第三年、第四年……直至身高停止增长,贾某是否继续还是保持中位值,或者跟中位值非常接近,又或是远远的偏离中位值?)
需要说明的是,现有的一些研究和工程应用会涉及到汽车运行状态预测,比如前向碰撞预警、换道轨迹规划,以及自动驾驶车辆轨迹规划等[11-15],此类行为预测是根据车辆当前状态、车辆动力性能和舒适性/安全性约束条件,在前方可行区域内搜索最优解,见图1(b),此类问题的本质是根据车辆惯性、性能和约束来预测下一时刻的运动状态,对人的行为因素考虑较少;但是对于较长的路段或者是一整条路,单靠车辆惯性的叠加已无法完成车辆行为预测,驾驶人的行为因素则是占支配作用,见图1(c)。
为此,笔者在重庆市选择了3 处复杂行驶环境作为实验路段,每个路段均包含不同的行驶场景,开展了自然状态下的实车驾驶实验,在真实的交通世界中采集了超过70位驾驶员的连续速度数据,在有限样本量情况下,从微观层面证实了中等驾驶行为(假设中的中等驾驶人)的客观存在,为微观驾驶行为预测、道路设施设计等提供理论支撑和关键科学证据。
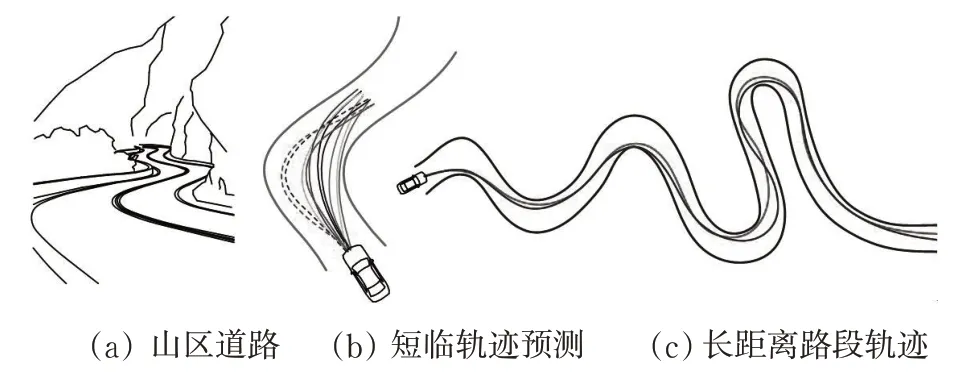
图1 短临轨迹预测与长距离路段上的轨迹行为Fig.1 path prediction and path behavior on a long road segment
1 实验方案
现有的研究主要是通过驾驶模拟器来研究人类在驾驶活动中的行为,但受驾驶模拟舱软硬件、场景逼真度和驾驶心态的影响,驾驶体验与真实道路之间可能存在较大的差异,导致驾驶操纵和车辆运行特性与真车驾驶不一致,进而影响研究结果的可信度。自然驾驶是近年来获取驾驶数据、剖析驾驶行为特征的一种研究方法,用车载仪器采集自然状态下的车辆运行数据和驾驶操纵数据,真实记录驾驶人的行为以及车辆运行状态。为此,本文是采用真车自然驾驶来采集汽车在道路上的连续行驶速度。
1.1 试验道路
重庆作为著名的山城,其依山傍水、错落有致的地形条件和地理特征,决定了桥隧密集、坡陡弯急、多层立体的道路特点,一直以来都是国内复杂立交的天然样本库。在重庆市辖域内选择3 处实验地点,分别是涪陵长江一桥以及南桥头立交螺旋匝道(道路I)、菜园坝长江大桥以及南桥头立交(苏家坝立交)(道路II)、江南立交匝道—向黄路—向黄隧道(道路III),见图2。涪陵长江一桥桥头立交匝道由720o螺旋匝道和连接曲线构成,螺旋匝道为恒定半径圆曲线,匝道横断面布置为双幅分向行驶,每幅单车道,上行匝道半径(内圈)39.525 m,下行匝道半径(外圈)50 m,匝道坡度4.5%。苏家坝立交空中鸟瞰为小提琴形状,为了满足通航高度菜园坝长江大桥主线桥墩较高,上下匝道桥靠近江岸一侧均由高墩支撑,最大墩高70 m,即典型的高悬空匝道;其中入口匝道包含1 座140 m 的短隧道;匝道横断面为双车道。江南立交匝道横断面为双车道,平曲线半径60 m,向黄隧道为1座890 m的中隧道。
本文选择的3 处试验地点,包含了不同形式的路段单元,包括直线路段、小半径曲线路段、多层螺旋线、隧道段等,见图2。实车驾驶时,每1处行驶环境均需完成不同场景的切换,以及简单←→复杂场景间的转换。
1.2 试验车和车载仪器
使用2种车载仪器来记录汽车在试验道路上的连续行驶速度,分别是Mobileye ME630 ALL(前视碰撞预警系统)和SPEEDBOX 惯性测速系统,其中SPEEDBOX 是基于高精度GPS 和IMU 相组合,在卫星信号遮挡时,对IMU输出的加速度信号进行积分补偿确实的位置和速度数据,但在实验中发现,同其他基于贯导补偿的航姿测量系统一样,在进入隧道5 s之后补偿精度下降,不到10 s之后信号完全失真;其中涪陵长江一桥下层螺旋匝道也存在位置信号丢失、惯导也无法进行补偿的问题。道路I和道路II的试验车是别克GL8(别克天尊),道路3的试验车是现代胜达(SANTAfe)。实验仪器和车辆见图3。
本文在学习掌握功能强大的分子动力学模拟软件Materials studio的基础上,结合对SiBCN的学习,从理论上建立了SiBCN陶瓷先驱体的单胞分子模型,运用分子动力学理论从分子水平的微观角度进行了模拟研究,整理实验所得到的结果与数据,初步得到如下结论:
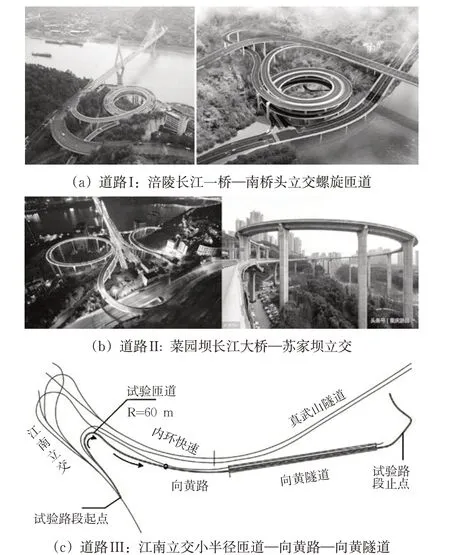
图2 本文的3处试验地点Fig.2 Three test sites of this work
1.3 被试(驾驶人)
本次试验的时间跨度为2017—2019年,共有72位被试参与本文的实车自然驾驶试验,其中道路I实车试验是在2017 年开展,被试10 人;道路II 实车试验在2018年开展,有30位被试参与实验;道路III的实车试验是在2019年开展,有32位被试参与实车驾驶。表1是驾驶人的主要信息。在实验开始前每位被试填写气质类型测试量表和多维度驾驶风格测试量表,被试在填写量表之前会得到额外的费用,作为填写量表占用时间所获得的报酬。

图3 试验车和车载仪器Fig.3 Experimental vehicle and on-board instruments

表1 实车试验的驾驶人信息Tab.1 Information of drivers participated the field driving test
1.4 实验流程
综合实验对象所处的路网条件、道路设施和交通组织模式,选择合适的数据记录起始点和车辆调头位置。根据试验时的交通情况,每位驾驶人完成3~6 次的遍历行驶,保证能够采集到自由流的行驶速度。以道路I 为例,车辆在起始点启动后同时开始记录数据,然后向前驶入螺旋匝道,从螺旋匝道驶出之后继续向前行驶至调头位置调转车辆,然后完成相反坡向的螺旋匝道行驶,之后再回到起始位置,最终完成螺旋匝道上行和下行的一次完整遍历。
2 数据处理
实车试验结束后对每个驾驶人的连续驾驶数据进行切分和截取,以数据记录起点和车辆掉头位置作为切分点,得到数据节段,每个节段包含实验路段和前后衔接路段的单次行驶数据;然后根据试验路段的起止点位置进一步切分数据,剔除绕行路段的冗余数据,得到试验路段起止点之间的连续速度曲线。
Mobileye ME630ALL是从汽车CAN总线获取的速度数据,第一列为时间轴。为分析方便,对速度数据进行积分,即把时间轴换成里程轴,得到里程-速度数据(Li,Vi)和相应的连续曲线,Li是第i 个点位的行驶里程,Vi是该点位的速度值。对速度值异常的曲线进行剔除,比如前方有严重干扰导致速度异常降低时。实验道路I 共得到45 条速度曲线;实验道路II上行方向108条速度曲线,下行方向106条速度曲线;道路III速度曲线有效样本数为80条。实验道路I~III的行驶速度实测曲线见图4。
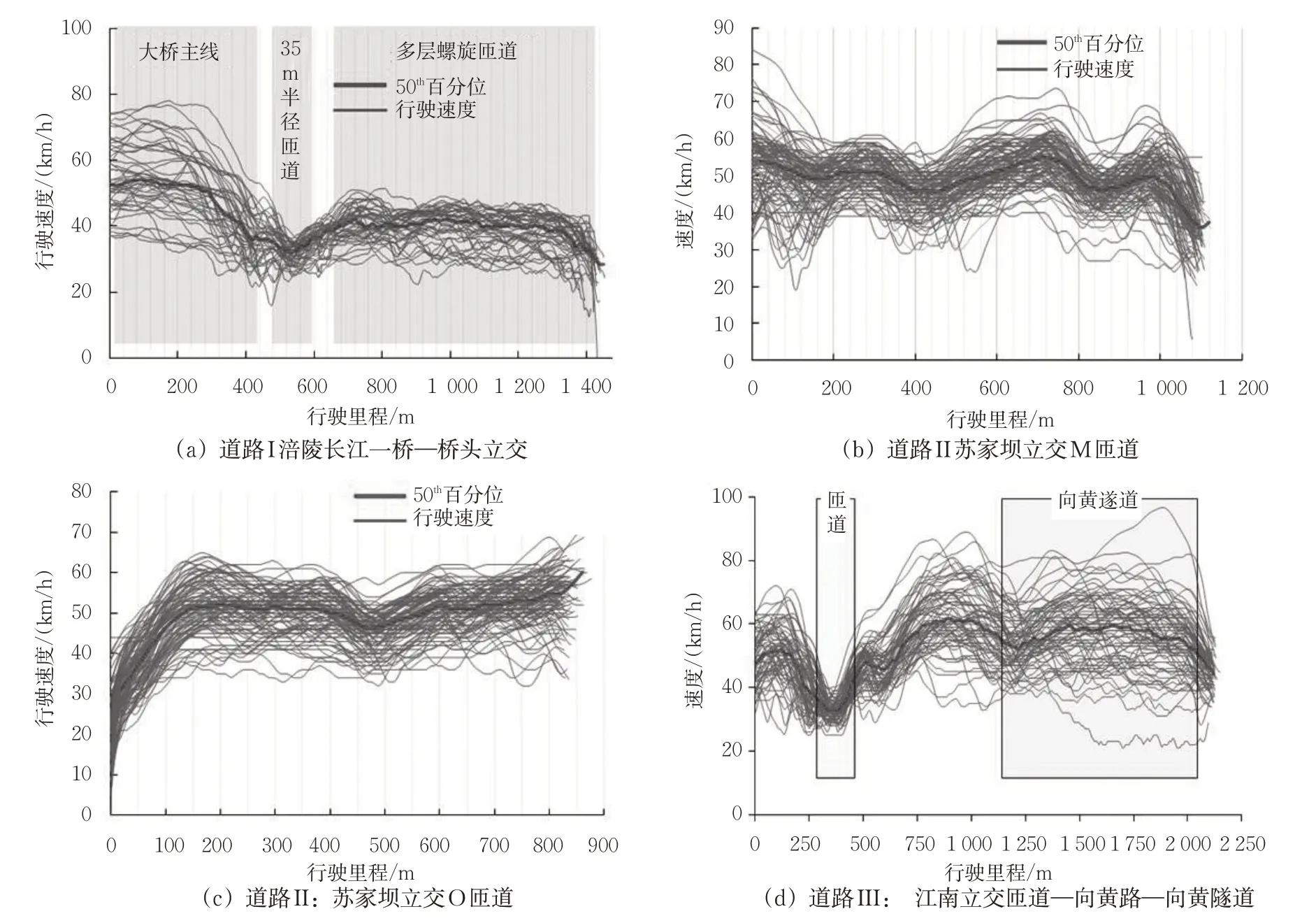
图4 行驶速度实测曲线以及中位值速度Fig.4 measured speed profiles and the 50th percentile speed profiele
由于速度幅值是随时间而变化,每一条速度曲线的里程轴并不是等间隔的,不同驾驶人的速度幅值以及同一驾驶人不同次数的速度幅值之间也存在差异,导致各条速度曲线的里程轴数据Li不一致。本文在绘制特征中位值速度曲线时(50th百分位速度值),需要将不定间隔的速度数据(Li,Vi)转化成固定间隔数据(Li,Vi),本文将里程间隔取为10 m,即整数里程Li= j·10 m。由于Mobileye 是读取CAN 总线数据来获得汽车行驶速度,CAN 总线的输出数据频率为10 Hz,采样时间间隔约为0.1 s,本文3条实验路段的(Li,Vi)数据,相邻数据点之间的里程间隔大都分布在1~1.7 m 之间。本文采用插值法来计算Vi,即Li落在Li和Li-1之间时,

对本文的3 条实验道路进行节段切分,节段长度为10 m,2 个横断面之间为1 个节段,使用PERCENTILE()函数可求出每个横断面的速度中位值(中位数)V50j,j 为断面序号,逐次连接相邻断面的V50j值得到中位行驶速度曲线,即“中等驾驶人”的行驶速度,如图4中的深色加粗线条。然后,针对每个横断面位置,计算各条行驶速度曲线在该位置的速度值与V50之间的差绝对值Vabs,j,k,k 为速度曲线编号。接下来,针对每条速度曲线,求出各个断面的速度差绝对值之和,即:

M 为实验道路按10 m进行等间距分割之后的横断面个数。最后,找出Vabs,k最小值对应的速度实测曲线,该曲线即为最接近中等驾驶人的行驶速度。
3 “中等驾驶人”的存在性实证
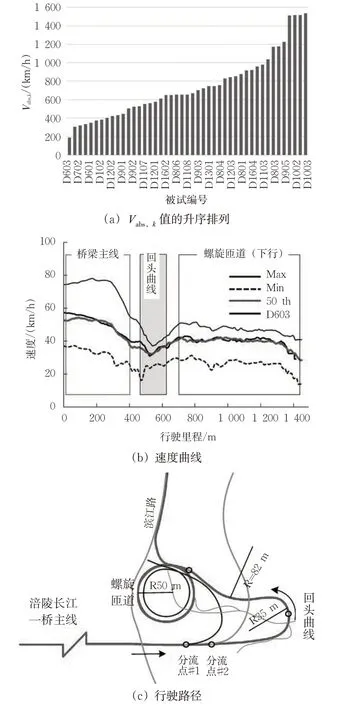
图5 涪陵长江一桥中等驾驶人的速度选择行为Fig.5 Speed of medium driver at Fuling Yangtze River Bridge
图6 (a)~(b)是苏家坝立交M匝道和O匝道的甄选结果。2条匝道与中位值速度的重合度最高的速度曲线均来自与编号为D24的驾驶人,与涪陵长江一桥相比,D24的速度曲线与50th百分位速度值的重合度更高,M匝道前450 m、O匝道前480 m范围内,曲线几乎完全重合。 M匝道是1条由5段圆曲线和8条回旋线衔接而成的连续曲线路段,而且是高悬空匝道,速度在该匝道范围内的经历了多次变化;O匝道是由4段圆曲线和5条回旋线顺次衔接而成,汽车进入该匝道之前经过1处T形交叉,行驶速度较低,因此驶入匝道之后有加速行为,匝道范围内还包含1 条长约170 m的曲线隧道。在如此复杂的道路条件下,D24的速度曲线在M匝道每个断面的平均速度差为1.06 km/h,而O 匝道每个断面的平均速度差仅有0.57 km/h,几乎可以完全忽略掉。即驾驶人D24与“中等驾驶人”在速度选择行为上高度一致。
图6(c)是从O匝道驶入菜园坝长江大桥主线之后的中位值速度曲线以及重合度最高的实测速度(来源于被试D18),行驶方向为由南向北,见图7。该桥主线的限速值为60 km/h。虽然测试时间是日间非高峰期,但桥上交通量仍比较大,驾驶人的速度选择行为会受制于前车的运行状态,但既便如此,中位值速度与实测速度D18-4 仍有较高的重合度(Vabs,k=86.4 km/h,每个断面平均之后仅有1.41 km/h的速度差)。
图8 是实验道路III 的甄别结果,该路段包含1条60 m 半径的回头曲线匝道和1 条890 m 的中隧道,驾驶人为了适应行驶条件的变化对车速进行了多次调整。在各条速度曲线中,被试D30 第二次行驶的速度曲线的Vabs,k值最小,即最接近于中等驾驶人的行驶速度,速度曲线D30-2 在每个断面上与中位速度值平均相差2.77 km/h,高于实验道路I和II。
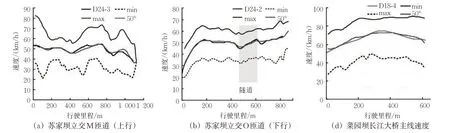
图6 苏家坝立交匝道和菜园坝长江大桥中等驾驶人的速度选择行为Fig.6 Speed behavior of medium driver at Sujiaba interchange and Caiyuanba Yangtze River Bridge

图7 菜园坝长江大桥—苏家坝立交Fig.7 Caiyuanba Yangtze River bridge and Sujiaba Interchange
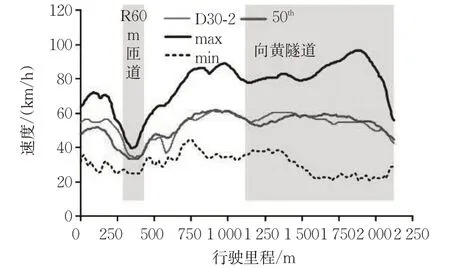
图8 江南立交匝道—向黄隧道中等驾驶人的速度Fig.8 Speed of medium driver at a ramp of Jiangnan interchange and Xianghuang tunnel
以上的分析结果表明,不管是行驶场景是直道还是连续弯道,不管是曲线桥、多层螺旋桥还是曲线隧道,不管行驶环境如何复杂和特殊,均有驾驶人表现出与“中等驾驶人”高度一致的速度选择行为。这种一致性体现在2个方面:①路段单元范围内(单个场景)的速度幅值一致性;②行驶场景切换时,在不同路段单元之间速度变化趋势的一致性;即在一个持续的时空范围内(较长时间的连续行驶过程),始终存在与“中等驾驶人”驾驶特征一致的时空轨迹。
根据图5~8 中的结果,速度曲线幅值与50th百分位速度最接近的驾驶人,可以等同为具有“中等驾驶行为”的驾驶人,即中等驾驶人。在上文5处典型路段(根据行驶方向,实验道路II含苏家坝立交M匝道、O匝道和大桥主线等3个典型路段)中,确定得到的中等驾驶人的基本信息为,见表2。
4 “85th百分位驾驶人”的存在性实证
由于以中等驾驶人的驾驶行为(将中等驾驶人的车速作为设计车速)作为道路设施的设计考量时,会有50%个体的行为没有照顾到,而容易导致各种安全问题。因此,近20 年来很多国家开始以85th百分位速度(即运行速度,V85)作为道路几何线形和交通设施的设计依据[16-17]。现有的研究是通过路侧观测的方法采集车辆驶过道路特定断面的地点速度,然后从断面速度中取85th百分位速度作为该断面的运行速度,再连接相邻断面的85th速度值,得到运行速度曲线[18-20],见图9。在图9中,4个断面的V85值分别是37,29,38 和25 km/h,假设第1 个断面的V85值是甲车的地点速度,那么第2 个断面的29 km/h 是否仍是甲车的通过速度,还是别的车辆比如乙车,如果是,那么第3个和第4个断面是否还再是甲车?这个疑问至今为止并没有答案。

表2 中等驾驶人的基本信息Tab.2 Basic information of medium driver
以10 m为固定间隔进行横断面划分,提取出速度曲线在每个横断面上的速度值,然后确定出85th百分位速度值,依次连接相邻横断面的85th百分位速度得到V85曲线,然后用最小速度差方法找出与V85曲线最接近的速度实车曲线。图10给出了3处实验地点的特征百分位速度值连续曲线(速度最大值、速度最小值、85th百分位速度、15th百分位速度),以及与85th百分位速度值(V85曲线)最接近的速度曲线。涪陵长江一桥以及下行螺旋匝道,被试D16 的实测速度最接近V85曲线,该路段147 个断面的速度差累积值为271 km/h,单个断面的平均速度差为1.84 km/h;苏家坝立交上行匝道(M 匝道)55 个断面的速度差累计值为144 km/h,单个断面的平均速度差为2.6 km/h;苏家坝立交下行匝道(O 匝道)45 个断面的速度差累计值为59 km/h,单个断面的平均速度差仅为1.3 km/h,江南立交匝道—向黄路—向黄隧道214 个断面的速度差累计值为718 km/h,单个断面的平均速度差为3.3 km/h,略高于另外2处实验地点。由于速度幅值非常接近并且具有相同的速度变化趋势,可认为这些驾驶人是85th百分位驾驶人。
图10(b)和图10(c)中,均是被试D4 的实测速度值与V85曲线最为接近,这2 条路段同属于苏家坝立交的匝道,是相同的样本,表明驾驶行为具有较高的稳定性,即在不同的路段表现出相同的速度特征。
江南立交—向黄路—向黄隧道的速度分布见图11,在图11(a)中能观察到由于行驶环境的改变,15th百分位和85th百分位速度曲线幅值沿行驶里程有明显的变化,2条曲线之间的包络区域的宽度也是随着行驶距离而变化,在进入小半径匝道时速度幅值迅速降低,同时包络区域的宽度开始收窄,即不同驾驶人在小半径曲线以及邻近范围内表现出较强的趋同性,表明小半径曲线路段对驾驶人的速度选择行为有较强的约束作用。此外,行驶速度在隧道入口之前开始下降,并且下降趋势持续进隧道洞内100 m左右。

图9 公路特征断面的地点速度以及运行速度Fig.9 spot speed measured on cross-section of highway and operating speed
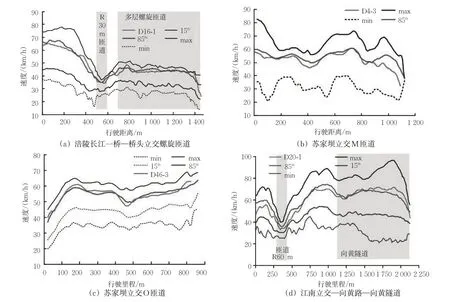
图10 特征百分位速度曲线以及与V85值最接近的实测速度Fig.10 Several particular percentile speed profiles and the closest measured speed to operating speed
计算出不同百分位速度曲线之间的差值,得到速度幅值的分布宽度,对驾驶人速度选择行为的离散性进行量化,结果如图11(b),深灰色区域是“V85- V15”值随行驶里程变化曲线,即15th~85th百分位之间(70%的速度选择行为)的速度离散性,浅灰色区域表示速度极差(Vmax-Vmin)扣除掉“V85-V15”之后的值,即另外30%驾驶人的速度选择行为分布。从图10(b)中能看到70%驾驶人选择的速度是分布在一个较窄的区域(速度离散性低于20 km/h),而另外30%驾驶人的速度则是分布在更宽的区域,即速度幅值更分散。
从图11 中能够得到一个重要的启示:驾驶人在道路上的速度选择行为虽然有较强的离散性,但是根据本文的实验结果,中间70%驾驶人的速度幅值是分布在较窄的区间内,而其余30%驾驶人(15%偏爱高速、另外15%偏爱低速)则贡献了速度离散性的主要部分。这与文献[21]对纵向加速度和横向加速度进行统计分析得到的结论类似,该项研究的结论是50%的加速度数据是在分布在0附近很小的区域内。此项发现表明对于道路设计和交通设施设计而言,设计参数只需要在较窄的区间内适当调整就可以照顾到70%道路用户的使用特性。

图11 江南立交—向黄路—向黄隧道的速度分布Fig.11 speed distribution along the route of“Jiangnan interchange-Xianghuang Road-Xianghuang Tunnel”
5 结 语
驾驶行为同人类的其他行为一样,一直以来都是难以预料的,但尽管如此,预测人类的各种行为仍然是研究者孜孜以求的目标和向往。基于行为统计数据是否可以预测出驾驶人的驾驶行为,其前提在于使用统计方法得到的驾驶行为是否存在于真实的交通世界之中。本文的研究证明了真实世界中确实存在“中等驾驶人”,他/她的行为特征完全符合统计的中间值,这为连续空间的交通行为精准预测奠定了理论前提;另一方面也为道路设施和交通安全设施的设计假定合理性提供了关键科学证据。并且,可以为“中等驾驶人”绘制一幅画像,40岁左右,驾龄10年左右,气质类型多为抑郁质,男性和女性都有。此外,本文以速度选择行为为表征,证实了“85th百分位驾驶行为”在真实交通世界中的存在性,为V85作为道路线形以及设施设计依据的合理性提供了关键科学证据。
