沙沱水电站升船机控制系统研究与应用
2020-11-11孙高龙
摘要:乌江沙沱水电站作为第二批“西电东送”项目之一,其通航建筑物采用全平衡钢丝绳卷扬式垂直升船机,随主体工程同步建设,它的建成对乌江黄金水道的全线复航具有重大的战略意义。文中介绍了沙沱升船机控制系统设计和研究的总体情况,主要对主拖动系统、检测系统、计算机监控系统、通航信号及广播系统和工业电视系统的等进行了详细阐述。经过工程实践验证,此控制方案设计合理、功能完善、运行稳定、安全可靠,满足通航建筑物的正常运行要求,可供有关类似的通航工程借鉴和参考。
关键词:沙沱水电站;垂直升船机;控制系统
中国分类号:TP29,U642 文献标识码:B 文章编号:xxxx-xxxx(2020)
沙沱水电站位于贵州省沿河县城上游约7km的乌江干流上,是乌江干流水电规划的第9个梯级电站。工程开发任务以发电为主,其次为航运兼防洪灌溉。枢纽工程主要由碾压混凝土重力坝、坝身溢流表孔、左岸坝后厂房及右岸垂直升船机等建筑物组成。通航建筑物级别为Ⅳ级,按一次通过500t级的机动单船设计,采用全平衡钢丝绳卷扬式垂直升船机型式。通航建筑物由上游引航道、过坝渠道(上闸首)、升船机本体段、下闸首、下游引航道等组成,总长约806m。船舶过坝时,通过上、下闸首驶入装有水的钢质承船厢内。承船厢由多根钢丝绳悬吊,通过设于承重塔柱顶部机房内的主拖动系统驱动,使之沿承重塔柱导轨垂直升降运行,运送船只过坝。沙沱水电站升船机控制系统主要由主拖动系统、检测系统、计算机监控系统、通航信号及广播系统、工业电视系统等组成。
1主拖动系统
升船机主拖动系统主要包括电动机、电气主传动装置、传动控制站等设备。
升船机主提升机构有四个驱动单元,每个驱动单元由一台电动机驱动,四个驱动单元之间采用矩形封闭式机械轴刚性联接,组成机械轴同步多电机传动系统。
1.1 主拖动系统的组成及控制方式
(1)主拖动系统为双闭环交流变频调速系统,每台交流电动机由一套单独的高性能的全数字式矢量控制交流变频无级调速系统控制(一拖一控制)。
(2)每套交流變频传动装置由功率单元和变频传动控制单元两部分组成。功率单元的结构形式为:交—直—交变频。整流器、逆变器功率元件均为IGBT,整流/回馈单元选用ALM(有源整流)系统,主动前端、自换向结构形式,能将各机构作业中产生的再生能量回馈至电网,不采用能耗制动。系统功率因数高于0.98,总谐波失真THD小于3%。实现机械特性的动态响应和速度精确度、频繁制动和四象限运行。
(3)变频传动控制采用直接转矩控制(DTC, Direct Torque Control)技术。
(4)四套交流变频传动装置由一套传动控制站进行协调控制。为保证各个提升电机的速度、位置的同步性,各机构变频器采用同一个集成逻辑控制和运动控制于一体的基于驱动系统的运动控制器进行直接控制,该控制器既具有逻辑控制功能,运动控制功能,同时该控制器也可以直接控制变频器,实现运动控制、逻辑和变频器控制在一个CPU 中执行。
(5)四套交流变频传动装置均有各自的速度环和电流/转矩环,当组成升船机主拖动系统时,采用两种控制方案:
①四个速度外环加出力控制;
②一个公共的速度外环加转矩同步控制。
方案①作为正常运行方案;方案②为应急运行方案。只改变控制软件就可实现两个方案的互相切换。
在方案①中,采用主-从控制方式,四套交流变频传动装置的一套设为主传动,另外三套设为从传动,在三套从传动中,设置力矩均衡控制环节,通过从传动的力矩输出信号与主传动的力矩输出信号的比较,调节从传动速度调节器的力矩输出信号,实现四套交流变频传动之间的出力均衡控制。
在方案②中,同样采用主-从控制方式,将主传动速度调节器的输出信号,同时作为三套从传动的转矩给定输入信号,以实现转矩同步控制。
电气传动控制系统(传动装置控制器)设置无扰主从切换控制功能,即:多电机同步传动协调控制逻辑中,设置1#/2#交流变频传动装置的主/从热备无扰切换功能,在正常运行时,1#为主交流变频传动装置,1#故障后,2#自动升格为主交流变频传动装置,当4套交流变频传动装置中有1套或2套(对角)损坏(异步电机或变频装置),其余3套或2套(对角)仍能不间断驱动船厢运行一个航次,切换速度扰动小于额定速度的2%。此时,负荷自动地重新在正常工作的传动装置中分配,系统仍能保证出力均衡,仍满足任意两台电机间的转矩差小于当时两台电机平均输出转矩3%的要求。
(6)四套交流变频传动装置组成具有电流/转矩环、速度环、位置环三闭环全数字无极调速控制的升船机主拖动控制系统。位置闭环方式采用半闭环方式,位置闭环调节器采用P调节器,同时,采用速度前馈和加速度前馈结构来提高速度给定信号的响应速度,并消除速度跟踪控制的稳态误差。
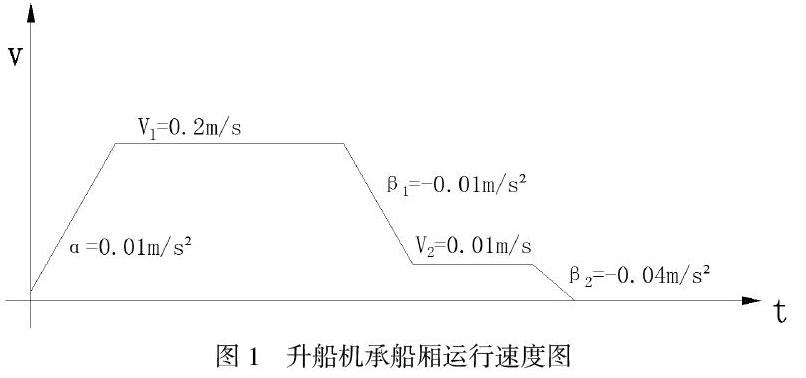
(7)主拖动系统的运行速度给定信号由集成在传动控制站中的斜坡发生器生成,根据行程实现五阶段速度图控制。
(8)传动装置控制器之间采用Profibus工业现场总线环网通信,通过传动装置控制器间的环网通信,快速、精确和周期性地对过程数据(控制信息、设定值、实际值和状态信息)进行交换,实现四套电气传动装置之间的数据传送和协调控制。传动控制站与上级监控系统进行联网通信,实现整个升船机系统的集中监控。
1.2 主拖动系统设备选型
主拖动系统各电动机及其交流变频传动装置采用ABB公司原厂成套设备。电动机采用ABB M3BP355SMC8型交流变频电动机,主要技术参数为:Pe=200kW,Ue=380V、50Hz,ne=739r/min,TN=2570N·m,cosφ=0.80。变频器型号为ABB ACS800-17-0390-3,主要技术参数为:UN=400V,Icont.max=565A,Imax=773A;无过载应用Pcont.max=315kW;轻过载应用IN=542A,PN=315kW;重载应用Ihd=423A,Phd=250kW。传动控制站采用AB FlexLogix可编程序控制器(PLC),热备冗余配置,CPU模块型号为1756-L71。
2检测系统
检测系统设备是升船机控制系统中控制参数和状态信息的来源。升船机运行过程中,各检测装置能按预定程序向现地控制子站发送一系列相关的被控参数和状态信息。计算机监控系统通过对这些数据进行采集和比对分析,实时对各类数据的可信度作出评价,择优对系统进行控制,并能及时发现、处理和预防各种可能出现的故障,从而保证升船机准确、有序、稳定、可靠地运行。
升船机的检测系统设备主要包括下列几种:水位测量、水深测量、行程测量、位置测量、开度测量、船厢静态调平检测、船厢动态水平检测、船舶探测装置、船厢减速停位检测和监护检测等。
3计算机监控系统
3.1 网络结构
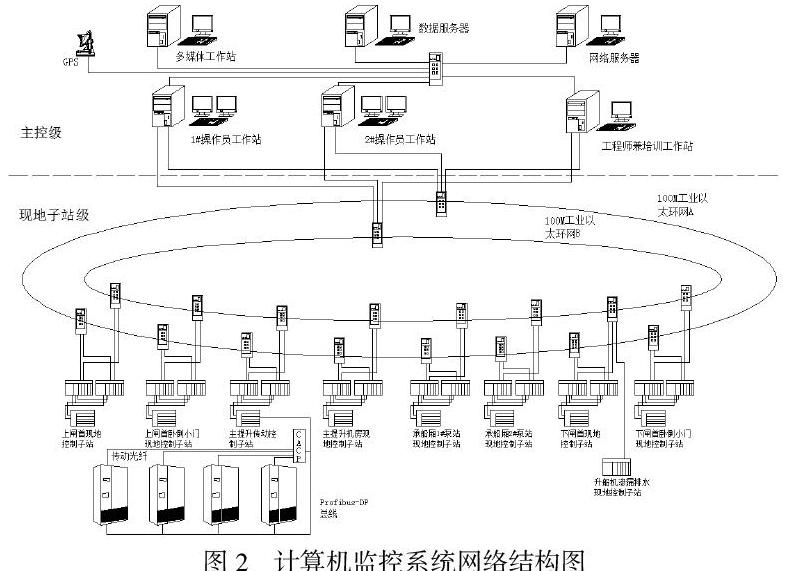
计算机监控系统采用全开放的分层分布式冗余环型100/1000M工业以太网,分为主控制级和现地控制级两层。主控制级按功能分散设置不同的服务器及工作站,现地控制级按对象分散设置不同的现地控制子站。主控制级设备之间通过100/1000M单工业以太网连接。主控制级和现地控制级设备之间采用100Mbps冗余环型工业以太网连接。当监控系统出现网络故障时,各现地控制子站之间可通过电气硬接线进行可靠、必要的闭锁,确保在网络故障状态下能进行正常操作运行。网络结构详见图2《计算机监控系统网络结构图》。
3.2 配置及功能
3.2.1主控制级
主控制级负责升船机所有机电设备的集中监控(包括数据采集与处理、数据记录与监视、事件顺序记录及事故追忆、流程控制与操作)、网络数据通信、系统时钟同步、系统自诊断及自恢复、升船机维护管理及模拟培训等。主控制级设备的具体配置和功能如下:
①主控制级设备主要由两台操作员工作站、两台数据服务器、一台工程师兼培训工作站、一台多媒体工作站、一台网络服务器、一套冗余UPS装置和一套GPS时钟同步系统、网络打印机及组网设备等组成。其中工作站型号为HP Z230,服务器型号为HP ML350pT08 E5-2620。
②操作员工作站负责完成升船機中控室运行值班人员与监控系统人机对话以及实时监视和控制等功能。
③数据服务器以全硬件冗余热备方式工作,主要负责主控制级高级应用软件的运行及实时数据的采集和处理,并兼做历史数据的存储、归档和检索,数据库生成及管理,运行管理文档的保存和检索等。
④网络服务器负责主控制级网络通信管理以及对外通信管理等,预留与通航调度系统、电站计算机监控系统及升船机火灾自动报警系统的接口,并设置有二次安全防护措施。
⑤工程师兼培训工作站用于修改定值、增加和修改画面、系统维护、软件开发及远程诊断,还可以离线设置,仿真培训。
⑥多媒体工作站负责工业电视系统和广播系统的控制及管理。
⑦时钟同步系统(GPS)用于实现计算机监控系统设备的时间同步校正。
3.2.2现地控制级
现地控制级主要负责监控对象范围内有关机电设备的现地监控(包括数据采集与处理、数据记录与监视、事件顺序记录及事故追忆、流程控制与操作)及网络数据通信等,每套现地控制级设备均具备独立运行能力,在脱离主控制级时能够独立完成其监控范围内相关设备的实时监视与控制。
现地控制级共包括9个现地控制子站,分别实现对上闸首、上闸首卧倒小门、主提升机房、承船厢1#泵站、承船厢2#泵站、主提升传动系统、下闸首、下闸首卧倒小门及升船机渗漏排水设备等的监视和控制。
在升船机中控室控制台上设置有正常停机按钮、快速停机按钮、紧急停机按钮按钮和强制关闭卧倒门按钮。
4通航信号及广播系统
4.1 通航信号系统
在升船机上、下闸首设置通航信号灯、中心线灯和边界字符;在承船厢设置通航信号灯和边界字符。通航指挥信号灯由升船机计算机监控系统控制,信号灯断丝、换丝、开路、过流等故障情况能输出无源接点报警信号,送入升船机计算机监控系统,通知运行人员发现和排除故障。
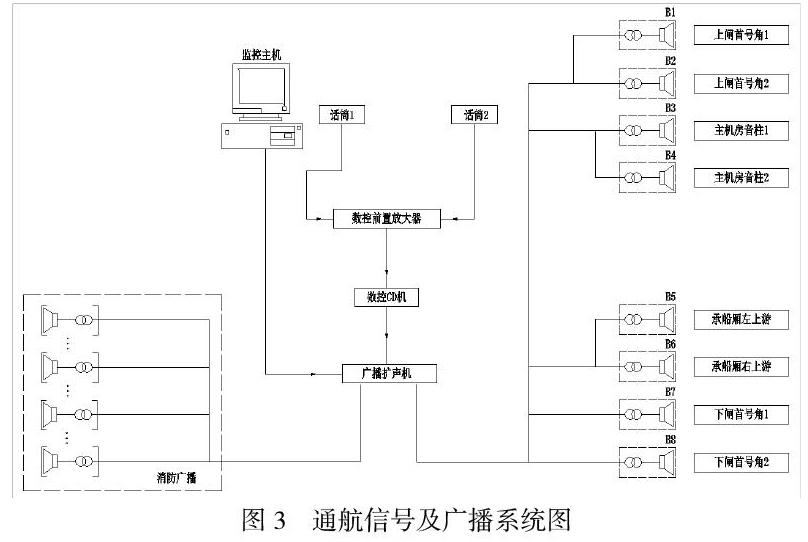
4.2 广播系统
升船机设置一套广播系统。广播系统有自动、人工两种播音方式,自动方式下根据升船机计算机监控系统指令播放多媒体服务器的语音信号输出,并具有分区广播、广播监听等功能。广播系统设备由1套扩音设备和若干现场扬声器组成,扩音设备布置在升船机集控室内,现场扬声器分别布置在上闸首、主机房、承船厢和下闸首等部位。
5工业电视系统
升船机设置1套工业电视系统,对整个升船机的运行过程和设备运行情况以及各控制站点工作情况进行监视,主要由前端设备(包括各类摄像机、云台、解码器等)、监控中心设备、网络设备及系统软件组成。主要监视的部位包括:上游引航道、上闸首、主机房、各电气设备室、集控室、承船厢、渗漏排水泵房、下闸首等。
6结语
沙沱水电站升船机控制系统按照“技术先进、安全可靠、经济合理、管理方便”的原则进行设计,系统配置和设备选型考虑了技术发展迅速的特点,充分利用计算机信息和通信领域的先进技术,整个电气控制系统由西安航天自动化股份有限公司集成实现,达到了国内先进水平。沙沱升船机自2016年试航以来,运行良好,满足航道系统安全稳定的运行要求,为确保乌江全线通航奠定了坚实的基础。
参考文献:
[1]易春辉,黄建平,张文剑,等.亭子口升船机电气控制系统总体设计与应用[A].中国水运,2013,05-0057-03.
[2]郭鑫华,王秀芝,许镇琳,蒋琪,等.全平衡垂直提升式升船机交流调速控制方案的试验研究.电气传动,2001-03.
[3]易春辉,陈江天,田云福,李冰,等.乌江思林升船机电气控制系统总体设计与应用[A].中国水运,2013,12-0102-03.
作者简介:孙高龙(1987—),男,河南灵宝人,工程师,主要从事水利水电工程控制及保护系统的设计工作。
