焦头河以东周边区域基础控制网的建立
2020-11-11徐龙华曾凌峰李莉
徐龙华 曾凌峰 李莉
(南昌市城市规划设计研究总院 江西南昌 330038)
1 引言
我国自2008 年7 月1 日始启用2000 国家大地坐标系[1-2]。南昌市政府印发的《关于全面使用南昌2000 坐标系的通知》要求,各县区、政府各有关部门自2019 年7 月1 日起全面使用南昌2000 坐标系(或2000 国家大地坐标系),立即停止使用其它坐标系。
焦头河以东昌东镇、将军洲、程家池、五星农场等周边区域基础控制网的建立项目,经南昌高新区管委会批准建设。主要内容为:布设GNSS 一级点约50 个,平面成果坐标系为南昌城建坐标系和南昌2000 坐标系,且所布设的GNSS 点要施测四等水准,高程成果的基准为1985 国家高程基准。
2 控制网设计
2.1 南昌城建坐标系、NCCORS 和南昌2000 坐标系简介
南昌城建坐标系是基于北京54 坐标系建立的平面坐标系(中央子午线115 度30 分),且高新区规划部门积累了大量该坐标系下的数据成果。南昌市连续运行卫星定位服务系统(以下简称NCCORS)由5 个新建参考站点和4 个共享省CORS 站点组成,可为全市提供统一的、高精度的空间参考框架。南昌2000 坐标系是基于2000 国家大地坐标系建立的南昌市相对独立的平面坐标系(中央子午线115 度53分59 秒),是2000 国家大地坐标系在南昌市的具体实现。
2.2 起算点设计
为保证新建控制网与现有南昌市平面控制系统一致,建立覆盖整个五星垦殖场区域统一的高精度的平面基础控制网,经认真研究分析,采用精度高、兼容性好、能够包围测区范围的NCCORS 站点(NCCH、NCMZ、NCNH)作为起算数据、南昌市域C级点V605、V086 作为检测点;高程控制网起算点为国家高等级控制点II 南黄14、III54-6。
2.3 技术指标设计
根据测区现状本项目平面控制网在已有NCCORS 的基础上,按网传递的方式共布设49 个GNSS 控制点,主要技术指标见表1。

表1 卫星定位控制网主要技术指标
本项目高程控制网是在平面控制网点上施测四等水准,四等水准测量的技术指标见表2。

表2 国家四等水准主要技术指标
3 控制网布设
3.1 平面控制网布设
平面GPS 控制网测量前,根据需求,收集、分析测区周边城市原有控制网的标石、精度等有关资料,并按静态相对定位原理进行控制网设计,同时考虑水准线路观测的需要,按三角锁形(边传递方式)布设了整个GPS 控制网(49 个点)。平面控制网形分布如图1 所示。
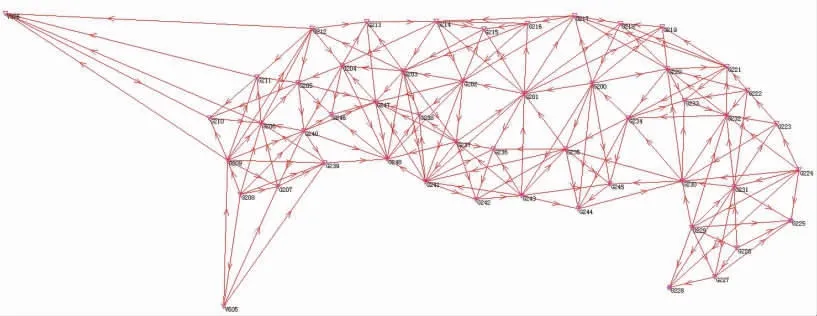
图1 平面控制网示意图
3.2 高程控制网布设
根据起算点点位结合一级GNSS 网的点位分布情况,按设计书的要求在影像图上预选水准点位置及水准测量路线,实地踏勘后确定点位及水准线路。本项目共选择72 个水准点(其中49 个点与平面点共用一个标石),联测了2 个已知点(III54-6、II 南黄14),线路总长126.4 公里,水准线路图如图2 所示。
4 外业观测
4.1 平面控制网观测
GNSS 点观测严格按照技术设计书及相关规范要求,共利用7 台双频接收机,采用同步静态观测方法,每个观测时段均在45 分钟以上。本次共观测了14个观测时段,经计算重复设站率大于1.6,满足要求。
4.2 高程控制网观测

图2 水准线路示意图
由于本项目工作量大,共组织3 个小组按照国家规范的要求同时进行水准测量。利用天宝DiNi12型数字水准仪器,采用单程测量方式进行,测量顺序:后—前—前—后;测量时视线长度均小于100 m,每测站前后视距差均小于10 m,每测段的前后视距累积差均小于10 m;测量两次读数之差均小于3 mm,2 次读数高差的差均小于5 mm。
5 数据处理及精度评定
5.1 平面控制网
现有NCCORS 站点成果和市域C 级控制网点成果均是在5 年前联测的,为确保本项目平面控制网成果的质量和精度可靠,解算前先对NCCORS 站点的坐标进行了初步的稳定性分析[3-4]。即下载了本次项目平面控制网观测前NCCORS5 个市本级站点和周边3 个IGS 站点(SHAO、BJFS、TCMS)2018 年第189-195 天共7 天的观测数据,采用GAMIT 软件进行站点坐标解算。由于NCCORS5 个市本级站点点名与lfile 文件中的名字重复,解算前将5 个NCCORS 站点名修改为B001-B005。由于CORS 站点周边观测环境良好,数据质量较好,不经过预处理直接采用GAMIT 软件进行批处理运算。本项目GAMIT 解算步骤主要包括观测数据准备、TABLE 文件链接、Process 策略设置、Sestable 文件修改、Sites文件设置、Station 手动更新和基线的批处理。相关设置见表3。
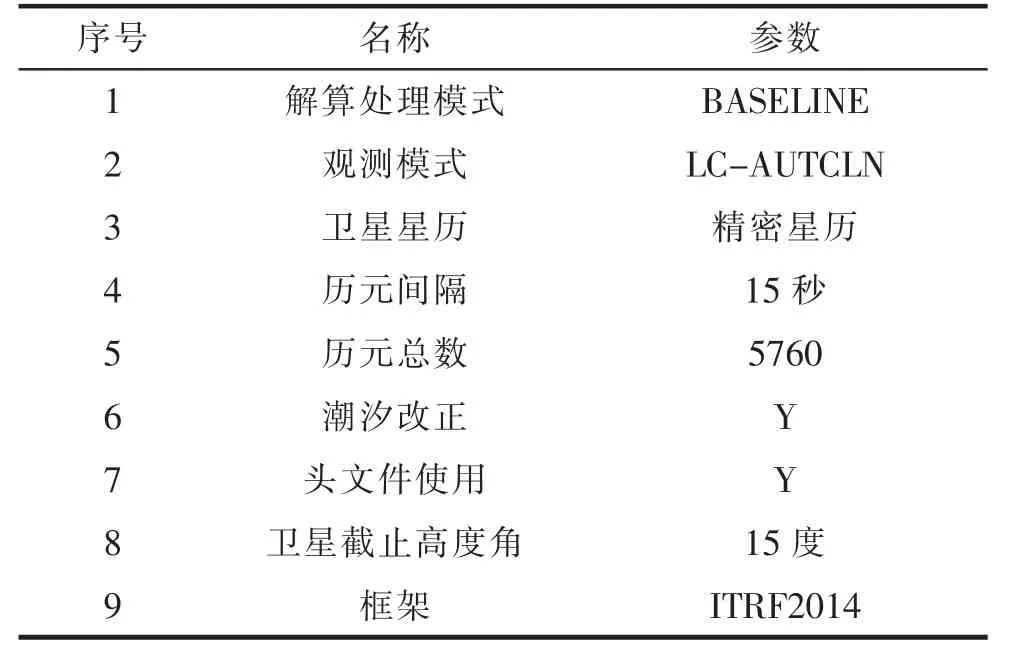
表3 TABLE 相关文件设置
基于上述步骤进行基线解算,并查看解算成果Q 文件的nrms 值(评价同步环质量好坏的一个指标)是否小于0.25,一般不能超过0.5。本次项目解算的nmrs 值最大为0.203,整体观测质量高、基线解的精度较好,可用于下一步平差。平差采用COSAGPS软件进行,平差成果5 个站点的坐标进行框架转换[5-6]和历元转换至2000 国家大地坐标系下与已有成果进行比较,框架转换和历元转换公式下:

式中:X97、Y97、Z97为待求97 框架下的坐标;X2014、Y2014、Z2014为解算的2014 框架下的坐标,TX、TY、TZ、D、RX、RY、TZ为框架转换7 参数。

式中:X2000、Y2000、Z2000为需转换历元下的坐标,X2018.5178、Y2018.5178、Z2018.5178为当前历元下的坐标,XS、YS、ZS为观测台站速度场信息。NCCORS 站点速度场信息参照武汉IGS 站的速度场信息。
经分析比较两者坐标较差均小于1cm,最大的为7 毫米,考虑到已有成果获取时站点数量、数据条件、起算数据等不一样,两者成果不一致是可以理解的,这5 个NCCORS 站点是稳定可靠的,可作为本次平面基础控制网的起算数据。
本项目一级平面控制网采用LGO 和广播星历进行基线解算,解算时所有基线长度中误差均小于2σ;如基线长度中误差大于2σ,该基线不保存输出;网平差采用COSAGPS 软件。
环闭合差最大值环为:G200~G220~G234~G200,其坐标分量Wx=-0.051 m、Wy=0.021 m、Wz=0.045 m,全长闭合差W= 0.071 m,全长相对闭合差为11.708 ppm;环线全长6 047.316 m,满足规范要求。其中:Wx为异步环x 方向闭合差,Wy为异步环y 方向闭合差,Wz为异步环z 方向闭合差。
不同时段复测基线的长度较差值最大的为GPS224~GPS229,基线长度为3 888.915 m,不符值为0.012 m,满足规范要求。
无约束平差中GPS 基线向量改正数均满足要求,其中基线改正数最大值分别对应的边为:GPS220~ GPS234 (VΔx=-2.33 cm)、GPS222~ GPS220(VΔy=-3.02 cm)、GPS234~ GPS200 (VΔz=2.19 cm)。其中:VΔx、VΔy、VΔz分别为基线向量在x、y、z 方向上的改正数;最弱点点号为GPS211,对应的点位误差为1.5 cm。
约束平差中最弱边为GPS211~GPS205,相对中误差为4.47 ppm;最弱点为GPS211,对应的点位误差为0.80 cm,其中X 误差0.51 cm、Y 误差0.61 cm。
按《城市测量规范》一级平面控制网测距要求,采用徕卡TS50 全站仪在网内均匀选定7 条边(GPS227~GPS228;GPS227~GPS226;GPS220~GPS219;GPS218~GPS219;GPS218~GPS217;GPS246~GPS247;GPS243~GPS236)进行了电磁波测距,从而进一步提高GPS 一级平面控制网的可靠性。经外业观测和内业计算,归算平距与GPS 网平差值反算距离比较结果如表4。

表4 GPS 网平差值反算距离与外业检测距离比较一览表
5.2 高程控制网
高程控制网采用COSA 软件进行平差计算,本项目水准路线全长126.4 km,水准点间平均边长1.7 km左右,符合规范要求;附合路线(III54-6~GPS210~GPS219~GPS225~II 南黄14)闭合差为10.0 mm,满足规范要求;每公里高程测量的高差中误差为0.56 mm/km,最弱点为GPS224,高程中误差为±3.68 mm,满足规范要求。6 个闭合环的闭合差如表5。
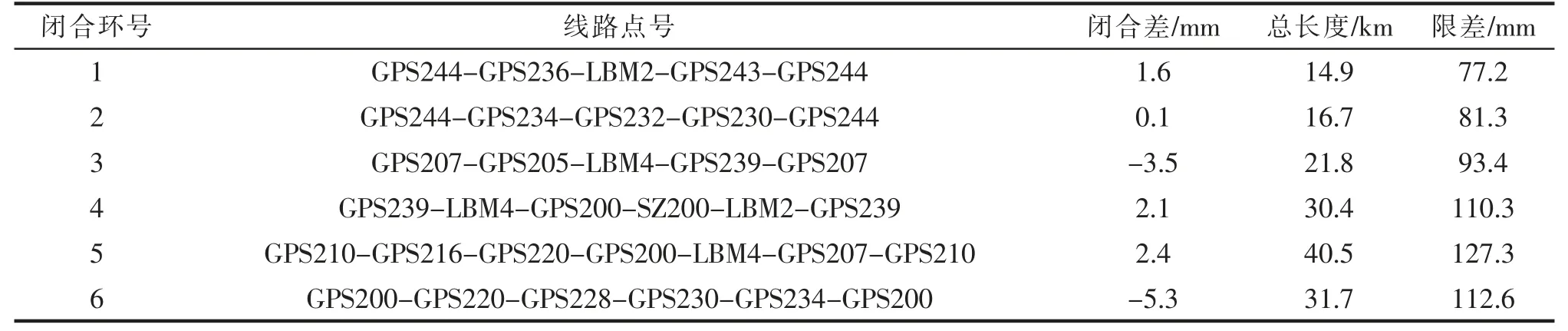
表5 水准网闭合环闭合差
6 结束语
本项目在外业选点时既考虑平面观测的环境要求,又考虑水准线路观测的方便,以平面和水准共用的原则进行网点布设,减少了外业选点工作量,提高了效率,缩短了工期;采用NCCORS 站点作为该区域平面控制网的起算数据,优化了网型,减少了观测量,保证了平面控制网精度,同时鉴于NCCORS 站点坐标多年未检测,利用IGS 站高精度高可靠性的优势,采用GAMIT 软件对NCCORS 进行稳定性分析,保证了五星垦殖场周边区域平面控制网的可靠性。五星垦殖场周边基础控制网的建立为该区域的基础设施建设提供了很好的基础数据支撑,具有良好的经济效益和社会效益,同时该项目的实施和完成尤其是对起算数据的利用和分析,可为其他单位在完成类似基础测绘项目时提供一定的借鉴。