两栖作战武装直升机伴随护航运输直升机协同引导技术
2020-11-10韦鹏飞
樊 博,韦鹏飞
(江苏自动化研究所,江苏 连云港 222061)
0 引言
在两栖登陆作战中,武装直升机可以对己方的运输直升机和其他各种战斗勤务直升机实施空中掩护,以对付来自空中和地面对己方运输和战勤直升机构成的威胁,使其顺利执行任务[1]。对进入战区执行任务的其他直升机来说,来自空中的威胁主要是敌方飞机或直升机的攻击,来自地面的威胁主要是地空导弹、高炮、高射机枪和其他武器的攻击。用固定翼战斗机护航,其与直升机速度、高度差太大,往往难以直接协同和配合行动,但武装直升机不但能够伴随被掩护的直升机编队共同行动,而且具有较高的与敌低空飞机、直升机作战的能力,不但可以对敌方地面武器实施攻击,予以先行摧毁或火力压制,而且能与敌直升机、低空飞机格斗,消灭对己方直升机编队造成的威胁目标。
但武装直升机伴随运输直升机过程中如何与运输直升机保持同步,当在遇到敌方威胁时武装直升机需要对威胁进行清除,而运输直升机需要重新找到一条航路快速通过危险区,在武装直升机清除威胁后,如何再引导其重新与运输直升机会合等问题都还没有深入研究。
针对此问题,本文研究采用改进的人工势场的方法,来实现遇到突发威胁时运输直升机编队快速重新规划航路;针对当威胁清除后武装直升机与运输直升机重新会合问题,研究采用时间协同引导控制策略,将武装直升机与运输直升机会和协同引导问题简化为求解会合时间和会合点问题。最后通过仿真试验对此方法进行仿真验证。
1 基于改进人工势场法引导运输直升机避障
一直以来,路径规划问题都备受研究者的关注[2-6]。人工势场法[7]是Khatib 于1986 年提出,后来经过发展成为路径规划中较为成熟、高效的规划方法。
武装直升机伴随护航运输直升机的航路重规划问题需要在实时性与最优性之间进行折中。人工势场法在规划航路时只需根据势力场计算当前位置受到的合力,结合当前直升机运动状态进行避障规划,所以其最显著的特点即为计算量小,运算速度快,可以得到平滑而安全的航路,但该方法容易受环境障碍物分布的影响而陷入局部僵局,而且目标点对物体的引力及斥力设计会由于模型的简化导致信息缺失,从而容易出现局部最优的情况。对此本文拟采用一种改进的人工势场方法进行航路重规划,解决上述问题。
1.1 人工势场法基本原理
人工势场法的基本原理是:将环境中运动的物体看作处于虚拟力场中的一个质点,虚拟力场由目标的吸引力场和障碍物的排斥力场组成,通过搜索沿着势函数下降的路线规划出避撞的航路。单障碍物受力图和多障碍物受力图分别如图1 和图2 所示[9]。
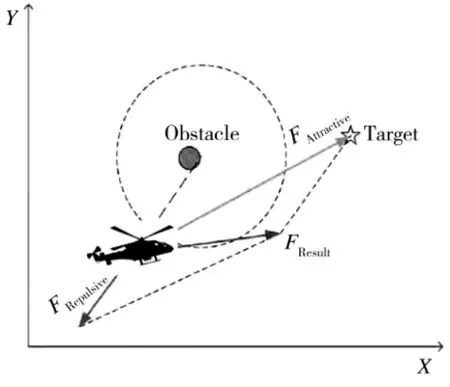
图1 单障碍物受力图
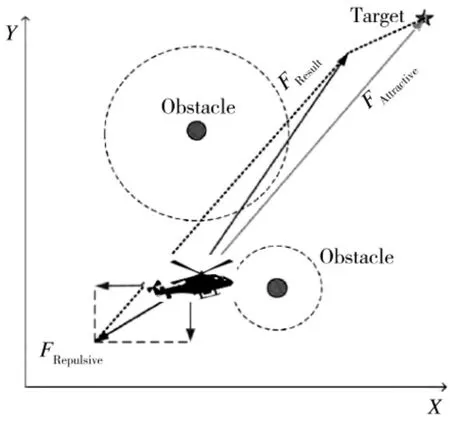
图2 多障碍物受力图
其中虚拟引力如式(1)所示,斥力如式(2)所示,详细步骤如下:
1)在规划空间内设计势场。任务目标对应吸引力场,方向指向目标位置。威胁障碍物对应排斥力场,方向为远离障碍方向。
2)根据规划空间引力和斥力场模型计算合力,结合运动物体当前运动状态规划运动轨迹。

式中,k 为引力正权重因子,X 为直升机的位置矢量,Xg为目标的位置矢量,η 是斥力正权重因子,ρ是直升机与威胁障碍之间的距离,ρ0是单个威胁障碍的最大作用距离,当直升机与威胁障碍的距离大于ρ0时无排斥力作用[9]。
然而,传统的人工势场法可能因为失去对全局的感知而容易陷入局部最小值,由于人工势场法有依赖局部势场的特性,可能存在人工势场构建不合理的情况,如果目标点的势能并不是最小或存在局部极小值,那么当直升机随着势场的引导到达势场的局部极小值时有很大几率无法逃离该区域,从而导致航路规划失败。
当直升机、威胁源中心和目标处于同一直线,威胁源在直升机和目标中间时,由于合力可能等于零,直升机将在威胁源前停止运动,或当吸引力过大时直升机将与威胁障碍相撞,这种情况会导致规划失败,如图3 所示。

图3 目标和障碍物在一条直线上
当多个排斥力和吸引力在某一区域近乎相等时,由于合力几乎为零,直升机的运动速度会变慢,甚至停止,导致规划失败,如图4 所示。
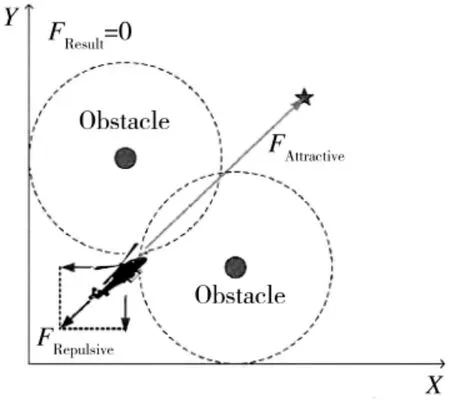
图4 多障碍物局部极值
1.2 改进的人工势场法
针对上文中所出现的问题,本文通过在传统的人工势场方法基础上引入Mamdani 型模糊控制算法[10],解决传统人工势场法会出现局部极小值而无法逃离该区域的问题。
目前,模糊推理系统已经成功应用于自动控制、数据分析、决策分析、专家系统及计算机视觉系统中。Mamdani 型的模糊推理方法是典型的模糊算法,其本质就是将一个给定输入空间通过模糊逻辑的方法映射到一个特定输出空间的计算过程。在工程应用中需要输出的是一个确定的控制量或其他具体数值,应用Mamdani 型模糊推理算法,将多条模糊规则合成后,对输出变量进行去模糊化处理得到具体的结果。
本文改进传统人工势场方法的思路是在原有引力、斥力的基础上增加一个辅助力,这个辅助力是一种自驱动力,模拟的是汽车在道路上行驶时如果车速降低,低于其期望的速度而且不能忍受时,本能判断目前车道较堵而自发地改变车道的驱动力,如图5 所示。
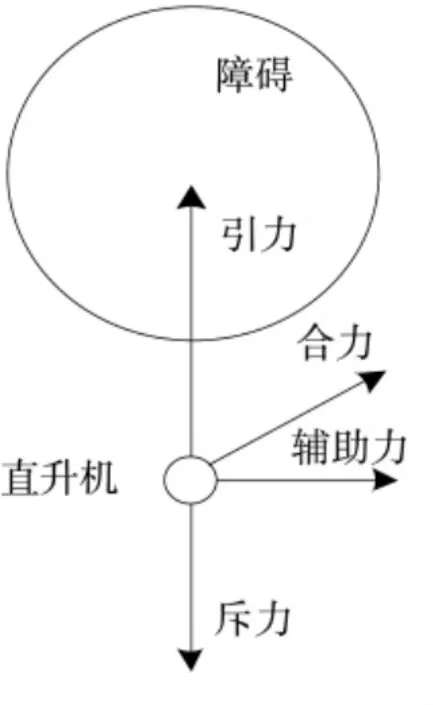
图5 改进的人工势场图
这里的模糊控制算法采用双输入、双输出的形式,输入分别是引力与斥力夹角,引力与斥力所形成合力的变化率,输出为辅助力的大小和辅助力的方向。输入、输出的隶属函数采用三角形隶属度函数。
引力与斥力的夹角分为斥力方向在引力方向的左后、左中、正前、右中、右后5 个模糊集,引力与斥力夹角的隶属度函数如图6 所示。
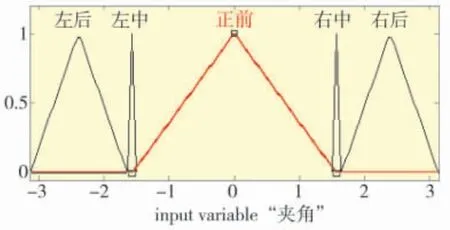
图6 引力与斥力夹角的隶属度函数图
引力与斥力所形成合力的变化率分为合力减小得较快(快减)、减小得较慢(慢减)、合力不变(不变)、增大得较慢(慢增)和增大得较快(快增)5 个模糊集,合力变化率的隶属度函数如图7 所示。
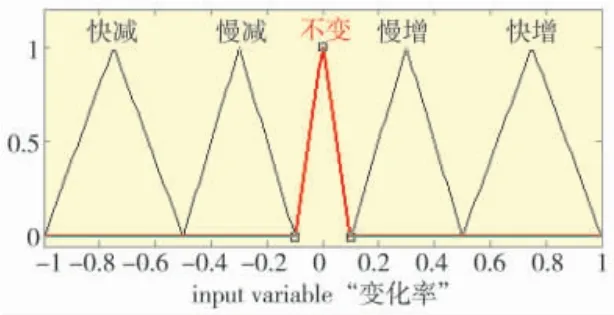
图7 合力变化率的隶属度函数图
输出参数中辅助力大小分为大、中、零3 个模糊集;辅助力的方向分为左中、正前、右中(相对于引力方向)3 个模糊集。
制定的模糊规则(部分)如下:
1)如果夹角为正前、合力变化率不变,则辅助力大小为零、方向为正前;
2)如果夹角为左后、合力变化率减少得较慢,则辅助力大小为中、方向为左中;
3)如果夹角为右后、合力变化率减少得较慢,则辅助力大小为中、方向为右中;
4)如果夹角为左后、合力变化率减少得较快,则辅助力大小为大、方向为左中;
5)如果夹角为右后、合力变化率减少得较快,则辅助力大小为大、方向为右中;
6)如果夹角为左前、合力变化率增大得较慢,则辅助力大小为中、方向为左中;
7)如果夹角为右前、合力变化率增大得较慢,则辅助力大小为中、方向为右中;
8)如果夹角为左前、合力变化率增大得较快,则辅助力大小为小、方向为左中;
9)如果夹角为右前、合力变化率增大得较快,则辅助力大小为小、方向为右中。
通过制定的模糊规则可以很容易地求出辅助力的方向,要么为正前,即保持目前的航向不变,辅助力大小为0;要么为左中,辅助力的方向为目前引力的左垂直线方向;要么为右中,辅助力的方向为目前引力的右垂直线方向。
辅助力的大小根据牛顿第二定律公式,可建立模型如下:

式中,Fa为辅助力的大小,mh为直升机的质量,Ve为期望飞行速度,Vc为当前飞行速度,te为期望重新达到期望飞行速度的时间,这个需要根据模糊控制算法输出的辅助力模糊值来确定,如果辅助力模糊值为小,可以取一个较大的te值,如果辅助力模糊值为大,可以取一个较小的te值,具体值还需根据直升机机动能力综合考虑确定。
通过以上方法和模型可以求解出辅助力,将此辅助力和引力、斥力合成得到最终的合力,示意如图5 所示,引导直升机规避障碍。模糊控制结合人工势场法引导直升机避障处理流程如图8 所示。
1.3 仿真分析
为了验证文中所改进方法的有效性,在Matlab R2010b 的环境下进行了仿真测试,结果如图9 所示,图中左下角为直升机起始点,右上角为目标点,圆圈为仿真的障碍,从仿真结果来看,改进的人工势场法不但能成功引导直升机到达目标点,航路较平滑,而且很好地解决了直升机进入某区域而无法逃离的问题。
2 武装直升机与运输直升机会和协同引导技术
2.1 问题求解思路

图8 改进的人工势场法处理流程图
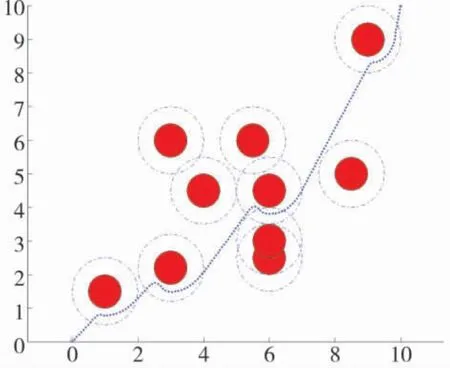
图9 仿真测试图
针对武装直升机在清除威胁后如何重新引导其与运输直升机会合问题,考虑到武装直升机要以最短时间与运输直升机重新完成会合,故需规划出一条满足最短会合时间的会合航路,而会合航路的确定关键在于会合点的确定,因为只要会合点确定了,就可以用改进的人工势场法快速地规划出一条武装直升机从当前点到会合点的航路。同时又由于会合点肯定在运输直升机的航路上,运输直升机任意时刻的位置可以用一个时间-位置函数表示,只要能求出会合时间就能确定会合点,因此,此问题又变为一个求武装直升机和运输直升机会合时间的问题。

图10 武装直升机与运输直升机会和示意图
2.2 会合时间求取方法
由于运输直升机的航路已经确定,其在航路上的任意位置可以表示为时间的函数,其位置函数表达可以如式(4)所示。

通过此函数可以知道运输直升机到达其航路上某一位置(假设此位置点就是预计的会合点)的时间TT。
对于武装直升机来说可以采用本文中改进的人工势场法,得到一条从当前点到预计会合点的航路,此航路的距离DR可以通过式(5)求得:

式中,n 表示此航路由n 段个分航路构成,p→i为第i段航路起始点的位置矢量,p→i+1为第i 段航路终止点的位置矢量。
根据式(6),可以预估出武装直升机到达会合点所需要的时间TR,式中VR为武装直升机飞往会合点的平均速度(根据武装直升机的性能人工设定),DR为航路距离。

本方法的求取思路是先假设TT=0,这时会合点就是运输直升机当前位置点,通过上文中改进的人工势场法规划出武装直升机从当前点到运输机当前位置点的航路,再根据式(5)、式(6)求解出TR。


图11 会合时间求取方法流程图
会合时间确定后,会合点就可以通过式(4)求得,利用改进的人工势场法规划出武装直升机的会合航路,在没有出现突发情况下,按照时间协同的引导控制方式,以此会合时间和会合点作为约束,引导武装直升机和运输直升机会合。
2.3 仿真分析
为了验证文中所采用方法的有效性,在Matlab R2010b 的环境下进行了仿真测试,结果如图12、图13 所示,图12 展示了初始的仿真态势图,左下角的蓝色小方块为武装直升机初始位置,左上角的粉色小圆圈点是运输直升机的初始位置,中间区域的黑白色圆圈为障碍或威胁区域。图13 为武装直升机和运输直升机会合协同引导过程图,图中上面的蓝色轨迹线运输直升机历史航路点所形成的轨迹线,弯曲的红色轨迹线为武装直升机历史航路点所形成的轨迹线。从图中可看出该方法能很好地引导武装直升机规避障碍并且快速地与运输直升机会合。

图12 初始态势图
图13 协同引导会合过程图
3 结论
为了解决两栖作战武装直升机伴随护航运输直升机在遇到突发威胁时能快速地为运输直升机重新规划一条新航线,在武装直升机将威胁消除后能快速引导其与运输直升机再次会合问题,提出一种改进的人工势场法,该方法通过在传统的人工势场方法基础上,引入Mamdani 型模糊控制算法解决传统人工势场法会出现局部极小值的问题,能够适应多障碍复杂的环境,且可以安全避障。以改进的人工势场方法为基础,采用时间协同引导控制策略,将武装直升机与运输直升机会和协同引导问题简化为求解会合时间和会合点问题。通过仿真试验表明,该方法算法简单、有效,具有很好的工程性,能很好地解决两栖作战复杂环境下的武装、运输直升机协同引导问题。
