海洋渔业志愿船观测数据可用性评估
2020-11-09滕骏华吴彬锋田杰孙美仙干道军
滕骏华,吴彬锋,田杰,孙美仙,干道军
(1. 国家海洋环境预报中心,北京100081;2. 宁波世纪海洋信息科技有限公司,浙江 宁波315700)
1 引言
21 世纪是海洋的世纪,而海洋观测是我们认识海洋、研究海洋和开发海洋的必要途径。为保障和促进沿海地区经济社会发展、维护海洋权益、提高海上突发事件应急响应能力、应对全球气候变化和促进海洋科学研究,我国提出了《全国海洋观测网规划》。目前,已初步形成了涵盖岸基、离岸、大洋和极地的海洋观测网框架[1]。志愿船观测是我国海洋观测网的重要组成部分,也是我国履行志愿观测船舶(Voluntary Observing Ships,VOS)计划应尽的国际义务,其获取的近海、中远海和远洋航线上的实时和非实时水文气象要素数据弥补了固定站点观测产生的空白。伴随着网络信息化的高速发展,志愿船采集到的海洋气象和物理海洋等数据为海洋环境预报、海洋防灾减灾、海洋权益维护和海洋资源开发等诸多方面提供重要的支持[2-3]。
从新中国成立初始,我国就陆续开展志愿船观测工作,其规模在改革开放前后达到顶峰。志愿船观测数据经船舶测报管理站进行收集和整理,并汇集到国家海洋环境预报中心和国家海洋信息中心。但从20 世纪90 年代开始,由于业务经费减少等原因,我国的志愿船规模逐年下降,志愿船观测工作面临严峻的挑战[4]。数量方面,通过志愿船系统递交数据的船只数目从2005 年的超过140 艘下降到目前仅有的约60 艘;区域方面,志愿船观测主要集中在大洋航线上,与近海成面、外海成片、远洋成线的设想还有差距;数据方面,志愿船观测仪器水平参差不齐、数据格式不统一、数据汇总不及时、观测要素单一,并且资源没有得到充分有效的利用。
随着精细化海洋预报的发展要求,海上观测需要在时间频度和空间分布密度上加大观测数据的获取与数据传输时效,我国有近30万渔船分布在近海作业[5],如果利用渔船进行海洋观测数据获取,在提高近海渔业生产安全环境保障服务的技术提升上,无疑是一种有效的手段。近年来,配备有全球定位系统(Global Positioning System,GPS)/北斗导航仪、风向风速仪、气压传感器和温湿度仪等高精度测量仪器的渔船加入到志愿船体系,成为新一代的海洋渔业志愿船。仅在我国东海海域,新一代海洋渔业志愿船的规模就达到近280艘,能够对风速、风向、气温、气压和相对湿度等多种要素同时进行自动观测,同时在近岸通过3G、远海通过北斗或GPS 系统实时传输,具有实时、连续、灵活和经济等优点。渔业志愿船的活动范围远超过目前我国近海布放的观测浮标,在空间上的分布优势大大提高了观测数据在预报中的重要性,在短临预报和精细化预报的发展上,应用潜力巨大。开展新一代海洋渔业志愿船观测,对“21 世纪海上丝绸之路”战略的稳步实施、对我国“海洋强国”的建设和海洋环境安全保障能力的提升都有着重要的意义。
2 研究区域和数据
本文的研究区域为我国东海海域,位于23°~33°N,117°~131°E 之间,是海面大气特性由低纬向中高纬过渡的代表性区域,受到复杂的局地流场作用[6]。该海域目前的实测数据主要来自自然资源部东海分局负责的16 个业务化浮标(其中10 m 浮标站位7 个、近海3 m 浮标6 个、波浪浮标3 个)、11 个业务化试运行浮标(其中10 m 浮标站位8 个、近海3 m 浮标3 个)以及32 艘志愿观测船(其中远洋志愿船17艘、近海志愿船15艘)。
本文所研究的观测数据来自宁波世纪海洋信息科技有限公司。为了扩展近海观测业务,该公司在渔船上建立了海洋志愿船观测系统,共有近280艘渔业志愿船参加,时间自2018 年10 月15 日—12月9 日,共计56 d,平均每天可以获取实时观测数据的船只数量约为90 艘。渔业志愿船装备有风向和风速传感器,风向传感器(型号CT-2A4)安装于风速风向横臂支架一端,量程为360°(16 个方向),分辨率为1°;风速传感器(型号CT-4XQ)安装于风速风向横臂支架另一端,量程为0~30 m/s,分辨率为0.1 m / s。 观测数据是基于甚小孔径终端(Very Small Aperture Terminal,VSAT)通信链路传输,准实时传输到地面数据中心,汇入渔业志愿船数据库系统。这些数据是标准化的结构数据记录,包括渔业志愿船和仪器编号、船只状态、观测时间、观测要素标识和观测值等,数据采样间隔可以精细到每10 s一个数据,传输至数据中心的平均时间间隔约为1 min。
3 志愿船数据处理
3.1 异常数据剔除
在对渔业志愿船数据进行无效字符剔除、统一时间尺度和数据格式转化等处理后,基于研究区域和时间内渔业志愿船观测数据记录的统计分析,共识别出渔业志愿船268 艘,其中能够正确获取船只编号和风向风速仪安装高度的渔业志愿船为205艘。进一步的分析发现,部分数据存在异常情况。基于研究时间和区域、渔业志愿船的活动规律、数据采集和传输方式,异常数据剔除规则如下:
(1)渔业志愿船航行速度高于40 节,超过正常最大航速。
(2)风速观测值超过40 m/s,达到台风风速级别(一般渔船不会在台风临近时执行出海任务)。
(3)风向风速观测值在长时间序列上为某一固定值,或短时间内出现剧烈反复变化。
(4)GPS 导航仪返回的经纬度在长时间序列上为某一固定值。
3.2 真风矢量求解
由于渔业志愿船没有安装电子罗盘,根据气象观测要素的收集方式,船只在移动过程中测量到的是相对风矢量,在进行数据评估前,还需要求解真风矢量。如果船只保持静止向北,仪器观测到的就是真风矢量。实际情况中,渔业志愿船在进行观测时,船体可能保持移动和/或转向,其获取的风向风速测量值为真风矢量、船头方向和船行风矢量共同作用的结果。图1a 中φ 即为船测风向角,并非真实风向角,需要根据船头方向获取船测风矢量,并结合船行速度和方向获取的船行风矢量,求解真风矢量。
3.3 风向奇异值控制
渔业志愿船观测数据存在某些船只回传数据不正确的情况,此时可以利用局部空间上多船观测数据具有统计意义上的一致性原理,通过船与船之间观测数据的相互比对,利用多船观测数据的优势,进行观测数据质量控制。数据质量控制的难点主要集中在风向观测值上,如图1b 所示,可以利用类似空间滤波的方法对每个观测值进行处理。对于渔船A 获取的某一次风向观测值,以渔船A 为中心,考虑到同一时刻分布在渔船A 周围30~120 km区域内存在N 艘渔船具有有效的风向风速观测值,可以认为这些渔船与渔船A 的风向观测值具有一定的区域同质性。若N 不大于1,则不进行判断;若N 大于1,对于每个区域,设置反比于距离的增益权重K,分别计算渔船A 和该区域内其它船只的风向观测夹角,乘以K后求和,得到渔船A在该区域内该次测量值的离散指数。各区域结果相加,获得渔船A 该次测量值的综合离散指数,若该指数大于50°,则该次测量值标记为无效,并对渔船A 增加1 次标识,以便后续快速识别问题船只。如表1所示,经过质量控制后,共得到46 795 条有效样本记录,数据有效率超过85%。
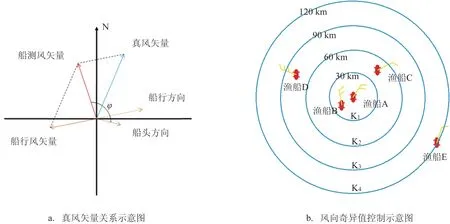
图1 风向判断与奇异值控制
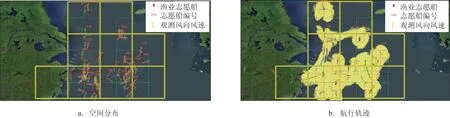
图2 渔业志愿船观测覆盖范围

表1 渔业志愿船观测数据统计情况
4 数据质量总体评估
4.1 观测数据直观分析
传统的海洋站都在沿岸或岛屿上,而现有的浮标和志愿船数量稀少,分布也不规则,无法满足大范围、长时间序列的同步观测[7]。而渔业志愿船观测在时间频度和空间密度上优势巨大,随机取一天的观测数据可视化显示在地图上,其观测区域较大,几乎覆盖整个东海区域,图2为渔业志愿船分布情况和航行轨迹。
由于渔业志愿船是移动作业,因此观测覆盖范围更大,从图2b 的航行轨迹图可以发现,其观测数据相当密集。大量志愿船在移动中实现了对东海海域的剖面观测,其数据对于研究区域天气过程中的空间变化有着重要的参考价值。
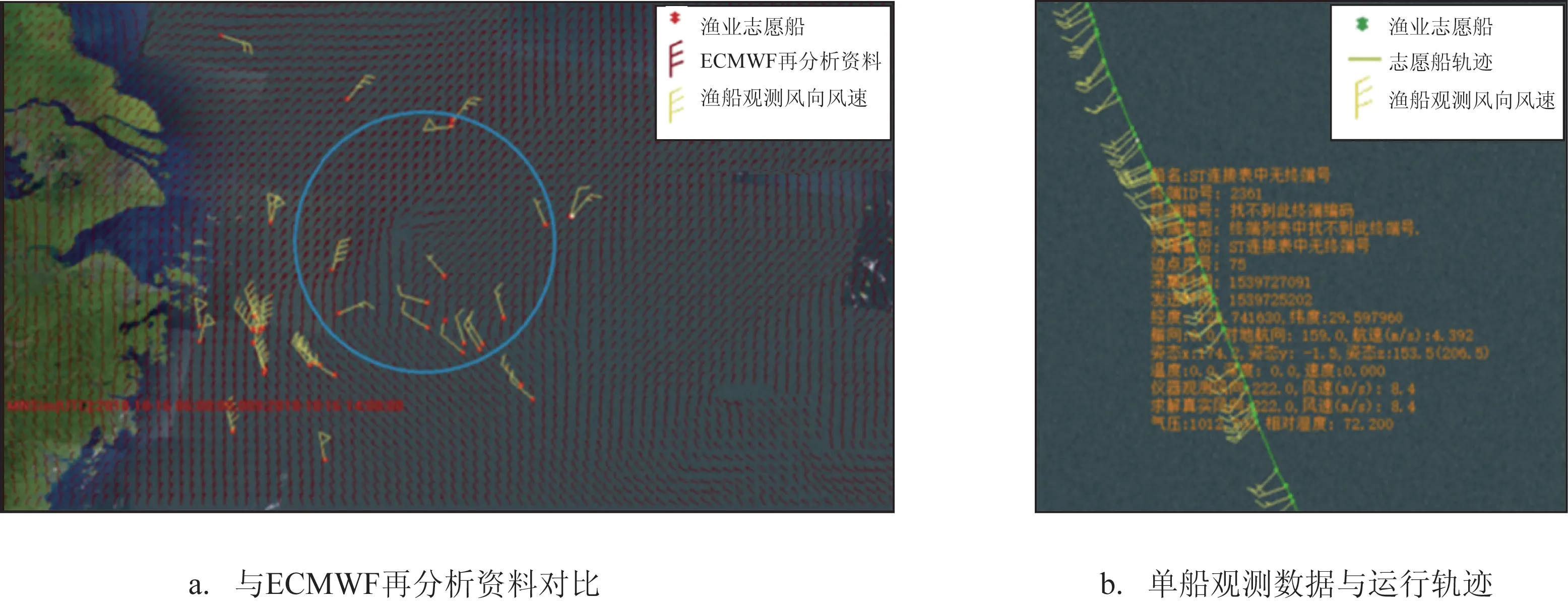
图3 渔业志愿船观测数据验证与对比
为检验渔业志愿船观测数据的正确性,可将观测数据与数值预报产品或再分析资料进行对比。本文选取2018 年10 月16 日14 时(北京时,下同)我国东海附近渔业志愿船风向风速观测数据,与同时间欧洲中期天气预报中心(European Centre for Medium-Range Weather Forecasts,ECMWF)再分析资料海面风场数据同屏显示,从而直观地判断数据是否可靠。图3a 中红色为ECMWF 再分析资料风场数据,黄色为渔业志愿船观测数据,两种数据整体趋势相近。中部蓝圈范围内,ECMWF 再分析资料风场数据显示存在水平风切变,而周围的渔业志愿船观测数据也反映出相似的特征,由此得到比较好的映证。
由于我国近海的地理位置十分特殊,其海面风场极具变化性,渔业志愿船每10 s 可对风向风速进行一次观测,完全满足观测频次的需求。图3b为某艘渔业志愿船海面风场移动观测情况,绿色为志愿船移动轨迹,黄色为观测的风向风速,由移动轨迹和观测值变化可以看出,其数据一致性总体较好。
4.2 观测数据与浮标数据对比
4.2.1 对比要点和对比方法
为进一步定量分析和评估渔业志愿船风向风速观测的可信度,本文根据实验区域、观测要素和观测仪器特性,对渔业志愿船观测数据进行误差统计,对比要点和对比方法如下:
(1)基于所涉及渔业志愿船的主要活动区域,本文采用东海大型浮标整点平均数据进行渔业志愿船风向风速检验评估,获取的数据经过质量控制后,资料质量相对较好,可用于再分析资料、卫星反演结果或其它观测数据的精度验证。
(2)不同渔业志愿船风速传感器安装高度不同,而大型浮标测量的是海面10 m 高度的风速,根据Mears 等[8]研究结果,在边界层中性层结条件下,近海面摩擦层内风速垂向分布符合对数规律,风廓线可以用下式近似表示:
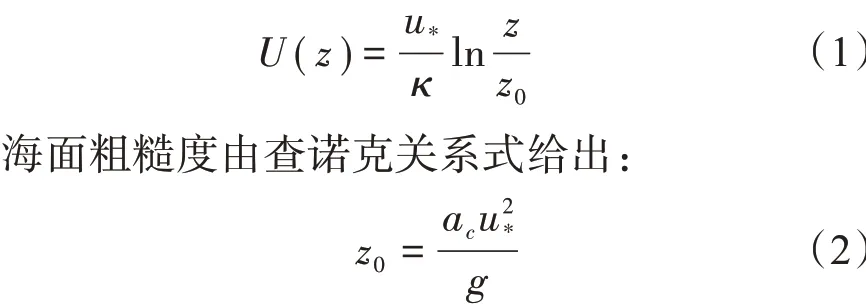
由式(1)和(2)获得10 m 高度不同风速下海面粗糙度z0查找表,基于各渔业志愿船仪器的安装高度,通过粗糙度查找表将其观测数据转换获得10 m高度观测数据,以便与大型浮标观测数据进行对比。
(3)实际情况中,渔船进行观测时,其位置不可能和浮标重叠。在进行渔船风向风速数据评估时,需要考虑渔船和最近的浮标之间的距离D,按照不同的范围D 匹配同时间、距离最近的浮标数据,考虑到我国东海海域复杂的局地流场情况,设定D 的取值范围为10~100 km,每10 km为一级,对该级范围内渔船观测数据进行匹配和评估。
(4)在数据质量评估上,根据各要素在时间和空间上的变化幅度差异,采用绝对误差、平均绝对误差、均方根误差和相关系数来判断渔业志愿船观测数据的质量和可用性。
绝对误差:
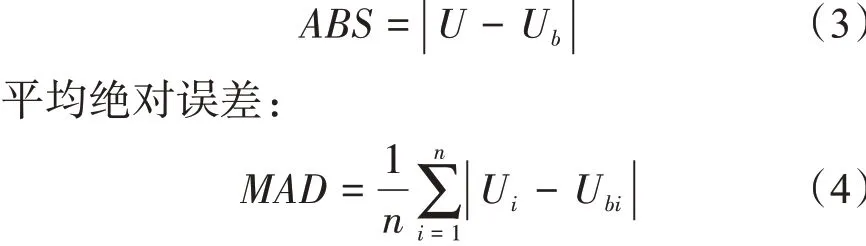
均方根误差:

式(3)—(6)中主要物理量为风向或风速。式中:U代表渔业志愿船经处理后得到的真实测量值,Ub代表浮标测量值,为对应的平均值,n为数据量。
4.2.2 浮标数据统计和预处理
本文所选用的浮标数据来自自然资源部东海预报中心承担的12 个10 m 浮标获得的整点平均实测数据,包括经纬度、观测时间、风向和风速等要素,观测频次为1 次/h,针对原始浮标数据进行无效字符剔除、时间单位换算、数据格式转化、异常观测值标识和极值处理等。经预处理后,浮标数据统计情况如表2 所示,表中可见浮标数据无论从数据总量或有效样本数据量上均少于渔船数据,但是由于浮标自身带有预处理模块,数据有效率更高。
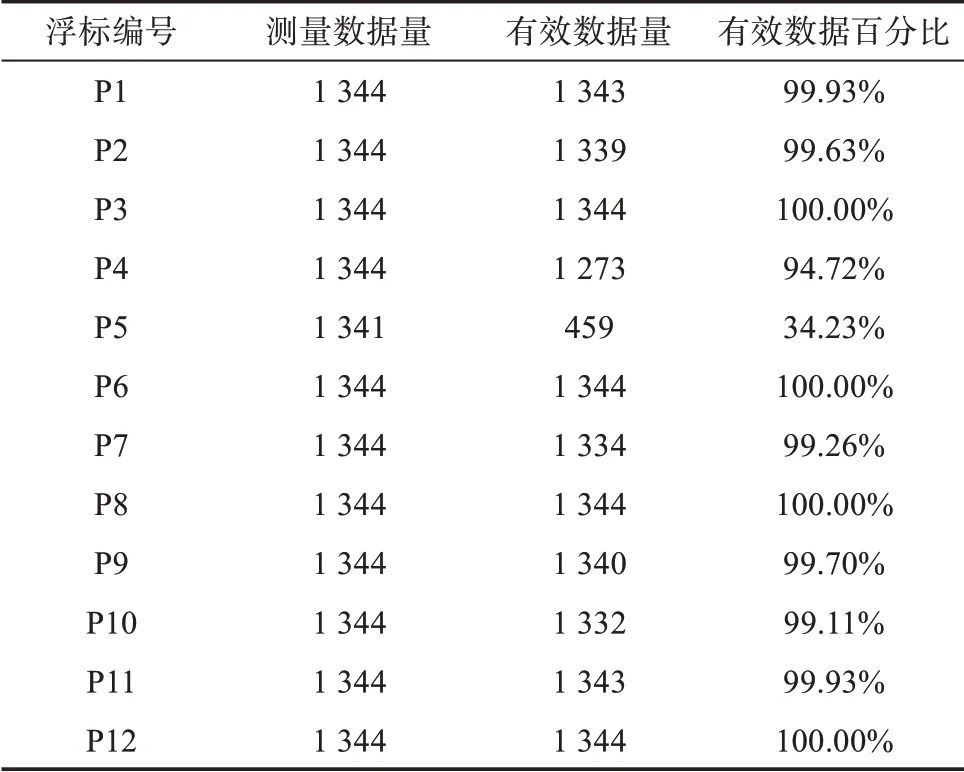
表2 浮标数据情况
4.2.3 渔船观测数据总体特征评估
在统计的时间区域内,渔业志愿船观测数据样本总数为46 795 个,如表3 所示,随着范围D的增大,匹配到的渔船数量和观测数据量也逐渐增多,在最大范围D=100 km 处匹配到样本数为7 529,匹配率为16.09%。
一般情况下,距离浮标越近,渔船与浮标观测的一致性应当越好。表3 的结果却显示,随着D的增大,风向平均绝对误差反而在减少。当D=100 km时风向观测结果最好,平均绝对误差为33.62°,相关系数0.96;而D为10 km或20 km的风向观测结果反而较差;当D=60 km 的时候风速观测结果最好,平均绝对误差为2 m/s,相关系数为0.73。分析原因,一方面D越小,匹配到的渔船和其观测数据越少,单一、较差的观测数据造成的影响越大;另一方面,部分观测误差较大的渔船出现在浮标周围的频次较高,这两方面造成数据评估结果出现异常。通过对每艘渔船的观测数据进行分析,排除仪器出现故障的渔船、以及风向和/或风速观测误差较大的渔船,处理结果如表4所示。
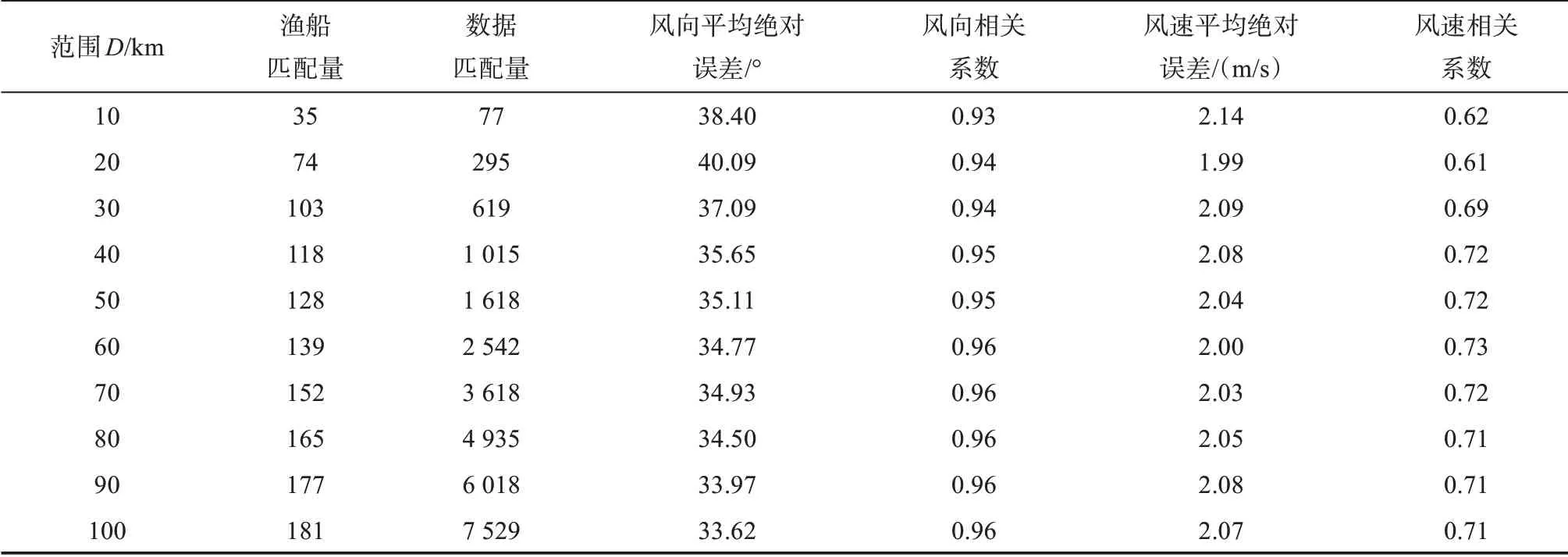
表3 与浮标不同距离渔船数据统计情况
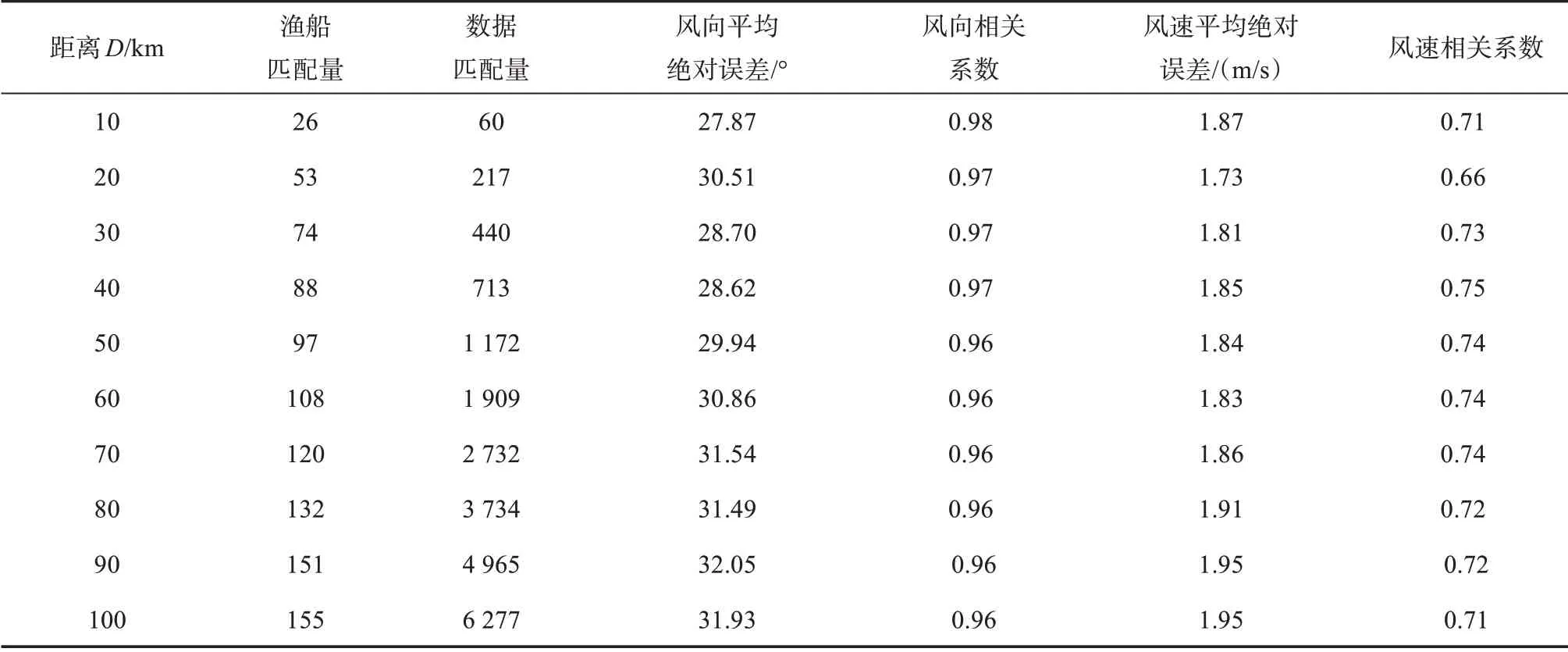
表4 再处理后与浮标不同距离渔船数据统计情况
表4可以看出,数据匹配数量虽然有所下降,但是风向和风速观测精度得到明显提升,风向平均绝对误差基本呈现随距离减小而减小的趋势。当范围D 为10 km 或20 km 时,虽然风向和风速误差均较小,但匹配到的数据量较小,统计结果不具有普遍性;当范围D 为30~50 km 时,匹配到较多的数据,同时满足风向误差小于30°、风速误差小于2 m/s;当范围D=100 km 时,匹配到6 277 条渔船观测数据,风向平均绝对误差为31.93°、相关系数为0.96,风速平均绝对误差为1.95 m/s、相关系数为0.71,满足风速小于2 m/s。为了检验渔船观测数据对近海100~200 km 空间尺度海上气旋的观测能力,选择D=100 km的情况进行进一步的数据分析。
针对范围D=100 km 的情况,对渔船观测数据的散点特征进行分析,图4 为渔业志愿船与浮标观测风向风速散点分布密度特征,其中填色等值线代表风向或风速样本的频率,斜率为1 的标志线代表风向或风速相等的情况。由风向分布特征可以看出,大部分样本的风向观测值分布在-60°~120°范围内,也就是北或东北风;风向高频区出现在标志线周围,表明样本与浮标风向具有较好的一致性。样本风速观测值主要分布在2~10 m/s范围内,大于15 m / s 的样本匹配率较低,这与先进散射计(Advanced SCATterometer,ASCAT)分析结果较为一致[9];风速高频区基本围绕在标志线附近,风速中位数在6~7 m/s之间。样本风向和风速情况基本符合我国东海10—12月的风场特征[10]。
4.2.4 渔船观测数据定量评估
为验证渔业志愿船在不同风速下的测量精度,针对范围D=100 km 的情况,按照日常预报业务中常用的蒲福风力表将风速分为4 级,分别代表弱风速(风力等级≤3 级,0~5.4 m/s)、中等风速(风力等级为4~5级,5.5~10.7 m/s)、较强风速(风力等级为6~7级,10.8~17.1 m/s)和强风速(风力等级≥8级,17.2 m/s 以上)。表3 为各分级的统计结果,可以看出随着风速的增大,风向精度逐渐增高、相关系数持续增大;同时风速精度逐渐下降,但相关系数却不断提升。弱风速下具有最小的风速误差(风速平均绝对误差达到1.47 m/s,均方根误差达到1.92 m/s),但是风速相关系数较差(仅有0.25),风向误差最大,这与欧洲气象中心资料(ERA-interim)的结果相似[11];中等风速下的样本数量最多,达到3 588个,同时风速和风向误差都较小;较强风速下风向精度有所提高,但是风速误差明显增大;强风速下具有最高的风向精度(风向平均绝对误差为26.85°,均方根误差为33.39°),但是风速精度最低(风速平均绝对误差和均方根误差都超过5 m/s)。上述误差变化产生的原因:在弱风速下,渔业志愿船的移动、转向和俯仰状态都会对传感器风向的测量产生影响,形成额外误差;而强风速下,一方面风速可能会超过传感器的量程,另一方面船体剧烈的姿态变化会使传感器的风速测量结果产生较大偏移。

图4 渔业志愿船散点分布特征
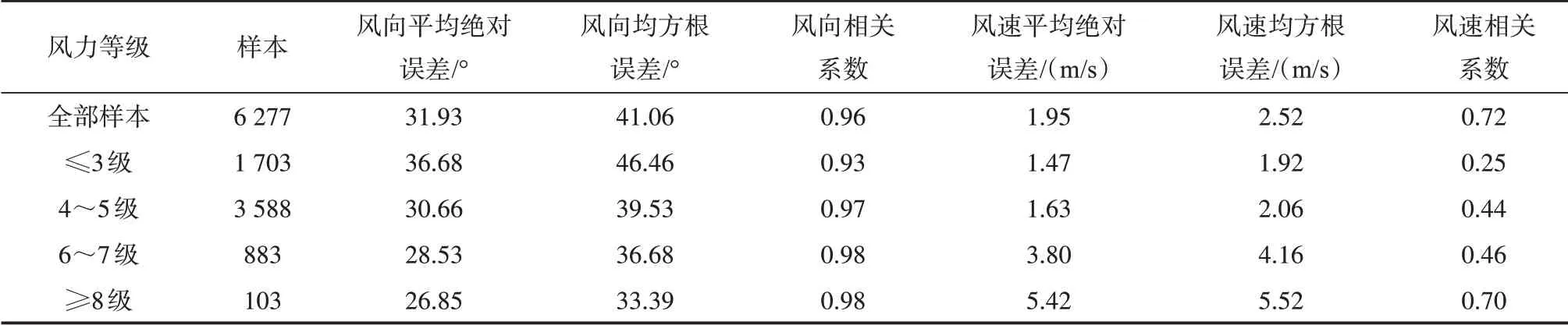
表5 不同风力等级下渔业志愿船观测误差统计
5 可用性分析
在现行海洋业务数值预报中,初始场、边界条件、物理过程和地形等诸多方面都会对数值模式准确率造成影响,使数值结果的时空分布和量值大小出现误差[12]。对于当前常见的海洋数值模式,其模拟结果的不确定性主要来自初始场,不同的资料来源、同化系统或参数化方案会产生差异较大的初始场,如何提高模式初始场的质量, 一直是一个十分棘手的问题[13-14]。观测数据除了用于数值模式结果检验外,还可以通过资料同化后用于构建或改进初始场,综合利用不同时次和类型的观测资料,可以大幅改进数值模式初始场的质量,获得最佳的模式参数,使模式模拟的状态更接近真实观测状态,提高数值预报水平。
目前常用的海洋风场产品同化资料包括欧洲气象卫星组织(EUropean METeorological SATellite,EUMETSAT)的ASCAT 风场产品、美国国家环境预报中心(National Centers for Environmental Prediction,NCEP)的CFSV2 再分析资料和ECMWF 的ERA-interim再分析资料等。在我国近海,空间分辨率为12.5 km 的ASCAT 风场产品,风向平均绝对误差约为33.05°、风速平均绝对误差约为1.50 m/s;CFSV2 再分析风场空间分辨率为0.2°、时间分辨率为6 h、风向平均绝对误差约为33.05°、风速平均绝对误差为1.78 m/s;ERA-interim 再分析风场空间分辨率为0.125°、时间分辨率达到3 h、风向平均绝对误差约为31.76°、风速平均绝对误差为1.85 m/s[15]。
在100~200 km 空间尺度,即D=50~100 km内,渔业志愿船观测数据风向平均绝对误差约为29.94°~31.93°、风速平均绝对误差为1.84~1.95 m/s,与ASCAT、CFSV2和ERA-interim处于同一水平,相比于浮标和海洋站,在空间范围和观测密度上,具有明显的优势。渔业志愿船观测数据经过时空匹配后,可以获取每10 min、30 min、60 min 的平均风矢量,在预报中可用于数据同化和初始场构建,对近海精细化网格预报中的观测资料欠缺,是一个重要、可靠的补充,与近海浮标和岸基站一起,可以构建更加完整的观测数据体系。
6 结论
(1)在我国东海海域,渔业志愿船风向和风速观测数据与浮标风向和风速实测数据具有较好的一致性。在100~200 km 空间尺度上,风向平均绝对误差小于30°,风速平均绝对误差小于2 m/s;按照风速分级的误差统计,在强风速下渔业志愿船的风向观测误差较小,在中等风速下的综合观测结果最好,可以满足业务预报的精度要求。
(2)渔业志愿船观测的风向风速与ASCAT 风场、ECMWF 再分析风场和NCEP 再分析风场有相当的精度水平,但是观测频度更高,在我国东海海域的空间分布更广,基本不存在数据滞后的情况。从目前试验数据来看,投入的200 多艘志愿船平均每天约有90艘船可以获取实时观测数据,经过数据质量控制后有85% 以上的观测数据有效。观测密度大,多船观测数据还可以相互校验,使得在数据应用上增加了多种选择,其观测数据可靠性大。
(3)渔业志愿船可以与岸基站、浮标观测形成相互补充,经过资料同化后能够提供更加合理可靠的初始场。在渔业志愿船高密度的观测系统支持下,小尺度的气旋天气过程将得到有效的监测,特别是,在近海精细化海洋预报中,志愿船观测资料可以对100~200 km 空间尺度的海上气旋预报提供十分有用的补充。
(4)通过集成、同化、分析和可视化,渔业志愿船观测数据可以提供更加丰富的观测信息,支撑更高时空分辨率的海洋数值模式。在大数据时代下,这是对现有海洋观测系统的一种扩展和完善,国家应将其纳入到预报数据获取体系中,加以有效利用,充分开发大数据分析软件技术,实现观测数据的高效实时获取。