除草机器人控制系统的设计与应用
2020-11-09田生睿孙政波郭庆阳
田生睿,谭 峰,孙政波,于 洋,郭庆阳
(黑龙江八一农垦大学,黑龙江 大庆 163000)
0 引 言
农田杂草是农业生产的大敌,对农作物危害极大,它们与作物直接竞争阳光、养分和水分,从而降低农作物的产量,降低经济作物的效益。全世界有3000多种杂草,其中大部分会影响农作物收成。而现有的3种除草方式:人工拔、化学除、机械除,一方面劳动强度大、速度慢、满足不了需求;另一方面,大规模喷洒农药对环境污染严重,非常浪费资源。农田除草机器人应运而生,除草机器人可以代替人类进行除草工作,减轻农民劳动强度,也可以减少农业从业人口数量,提高农业设备的自动化和智能化。国外很多国家在除草机器人方面做了大量的研究,主要集中在精确定位、机器视觉识别、路径规划、动作控制等方面,都取得了较好的成绩,但总体上还处于初级阶段。早在1998年美国加利福尼亚大学戴维斯分院的W.S.LEE 以耕作机机器人为平台,研制出基于机器视觉系统的喷药除草机器人[1],荷兰瓦格宁根大学的Tijmen Bakker 等人设计的自动除草机器人是采用柴油发动机作为动力,有独立转向系统,可实现四轮转向,采用机器视觉技术识别杂草[2]。瑞典哈姆斯塔德大学Bjorn Astrand 和Albert-JanBaerveldt 研究了的除草机器人由直流伺服电机控制,具有阿克曼转向控制机构[3],国内对除草机器人的研究相比发达国家起步较晚, 于2005年开始对除草机器人进行研究,现如今国家逐渐加强了农业除杂草工作的重视,也在开始自主研发。其发展过程经历了从机械化除草到智能化除草的转变。在之后的研究中,会形成我国独特的除草机器人系统,为我国农业生产提供良好的帮助。郭伟斌等提出了基于机器视觉的模糊导航的算法[4],华南理工大学的张勤等人发明了一种水田除草机器人,该机器人可以实现跨越式换行,解决了换行操作时的转弯半径大,造成有效种植空间小的问题[5]。在2014年,黑龙江八一农垦大学的李谦和蔡晓华用土槽试验车进行了基于机器视觉的机械手除草实验[6]。
1 除草机器人的结构设计
为避免除草过程中对田间植株的破坏,设计一种对垄沟和垄台边缘除草的自动行走机器人。该机器人以PLC 为控制核心,整车采用四轮驱动的工作方式,每个轮都由一个直流电机驱动,小车的转向方式为差速转向,能够减小转向所需的空间,使其可以适应更广泛的工作空间。漫反射光电开关安装在车头上,以控制除草机器人转向。除草铲部分使用液压系统,可以通过漫反射光电开关可以检测除草机器人是否在垄沟里,如果在垄沟里除草铲自动下降,如果出垄沟自动上升。除草机器人结构示意图如图1所示。
2 控制系统设计
2.1 控制核心
本除草机器人采用西门子PLC S7-200作为控制核心,其抗干扰能力强,故障率低,易于设备的扩展,程序开发周期短。CPU 224具有14个输入点和10个输出点,6个高速计数器(30kHz),2个模拟电位器(8位分辨率),可编程并具有复位输入,选用EM221作为扩展模块(8个输入点),控制回路如图2所示。PLC 的主控柜接线图如图3所示。由PLC 控制继电器,再由继电器控制各个模块,程序设计采用模块化编程方式,主要包括除草机器人的行走、避障以及除草铲升降。
2.2 编程软件
编程软件为购买S7-200后免费提供的Step7Microwin4.0Sp9软件,此软件易于安装,编程简便。软件拥有梯形图(LAD),语句表(STL),功能块图(FBD)3种编程语言,我们通常使用梯形图作编程语言。程序设计采用模块化编程方式,主要包括除草机器人的行走、调速、避障以及除草铲升降等。
2.3 行走控制系统
本除草机器人行走控制系统包括手动和自动两部分,手动包括前进后退左转右转,自动部分包括前进,后退、偏转调整和左右转弯。小车采用四轮独立驱动,由PLC 控制继电器,两个继电器控制一个车轮,其中一个继电器负责控制车轮前进,另一个继电器负责控制车轮后退,转弯使用差速度转弯的方法。差速转向是指通过控制左右驱动轮的速度来实现车辆的转向。
当车辆转弯时,车轮的轨迹线是一条弧线。如果汽车左转,弧线的中心点在左边。同时,右轮的弧线比左轮的弧线长。为了平衡这种差异,左轮应该慢一点,右轮应该快一点,不同的转速应该用来弥补距离上的差异。
系统控制流程图如图4所示。
2.4 避障系统
除草机器人在工作时碰到障碍物,会影响其正常工作,拥有避障系统是十分必要。本除草机器人使用E18-D80NK-N 漫反射式光电开关,放置在车头两侧,通过光电开关不断对比数据,可以帮助小车顺利的找到通过的方向,从而实现没有死角,能够到达任意角落。通过不断试验,确定出光电开关的安装位置,得到较为理想的避障系统,是机器人实现自主导航功能的基础和保障。
2.5 除草铲升降系统
除草铲部分在液压、气压和丝杠传动中选择使用液压系统,因为液压系统有体积小和质量轻、刚度大、精度高、响应快等优点,在支架两侧上安装漫反射光电开关,可以通过光电开关检测除草机器人是否在垄沟里,如果在垄沟里除草铲自动下降,如果出垄沟自动上升。在升降杆上下两端装置行程开关以控制升降距离。除草铲升降系统的控制流程图如图5所示。
3 转弯车速实验
除草机器人的转弯稳定性是除草机器人工作性能的重要一步。根据霍尔效应原理,将永久磁钢固定在轮轴转盘边缘,当转盘随测轴旋转时,磁钢也会同步旋转。在转盘下面安装有霍尔装置,转盘随轴旋转时,磁钢产生的磁场影响霍尔器件的输出脉冲信号,其频率与转速成正比:
其中,n 为电机转速;P 为电机转一圈的脉冲数;T 为输出方波信号周期。本实验中选择型号为NJK-5002c 的霍尔开关。
霍尔式转速传感器原理:它由磁性转盘和霍尔开关集成传感器组成,将磁性转盘的输入轴与被测转轴相连,当被测转轴转动时,磁性转盘跟随转动,安装在磁性转盘附近的霍尔开关集成传感器会在每一个小磁铁通过的时候产生一个脉冲。能够检测出单位时间内的脉冲数,就可以知道被测物体的速度。磁性转盘上小磁铁的数量越多,传感器的分辨率越高。
测量转速度首先是将速度表示为可编程控制器可识别的脉冲信号,以便对脉冲进行计数。霍尔器件作为测量转速系统的传感器,具有体积小、质量轻、使用寿命长、灵敏度高等优点。因此,选择霍尔传感器来检测脉冲信号。当车轮转动时,传感器运动,产生相应频率的脉冲信号。经信号处理后输出至计数器或其它脉冲计数装置进行转速测量。程序中C0为增计数器,记录车轮转速n。
测速程序如图6所示。
转弯调速选择PWM 直流电机调速器,PWM 是英文“Pulse Width Modulation”的缩写,简称脉宽调制,由于其特殊的性能,常被用于直流负载回路,调光灯或直流电机调速。PWM 调速器已经在伺服、电信和能量的传递等领域得了到广泛应用。本实验调速用AQMH3615NS 直流电机驱动模块,尺寸小,支持电机电压9~36V,欠压保护,最大持续负载电流12A (无散热)、15A (简易散热)、20A(厚型大散热器),类似L298驱动逻辑,可三线控制调速、正反转及刹车,支持满PWM,可直接使用按键控制正反转,脉宽调制的有效范围0.1%~100%。
工作原理:改变输出方波的占空比,使负载上的平均电流功率由0~100%改变,从而改变负载和电机转速。PWM 的优点是可以充分利用电源的能量和功率,电路效率高。实验数据如表1所示。
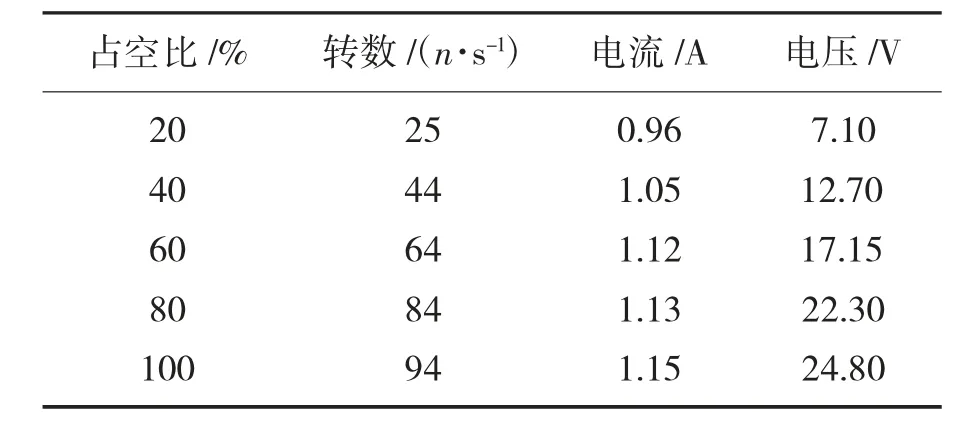
表1 测速实验数据
4 可行性验证
4.1 实验环境
在完成了系统总体设计后,需要对除草机器人的可行性进行验证。最终选择在黑龙江省八一农垦大学的电气与信息学院室外进行调试。实验主要工具和装置包括秒表、卷尺和笔记本电脑等。
4.2 测试内容
对于除草机器人的整体来说测试包括以下5步。
(1)测试电源工作情况,检查各个元件是否连接好。除草机器人的各个模块能否得到良好供电。
(2)结合程序检测电路输入,输出部分是否正常工作。
(3)测试避障系统是否稳定,将漫反射光电开关的检测距离调节到最佳位置。
(4)对小车工作中各种可能出现的一些情况进行测试,发现问题,解决问题。
(5)整理数据,进行实验数据分析。
4.3 避障系统测试
漫反射光电开关为除草机器人避障装置,检测距离为3~80cm(距离可调)。在具体的试验过程中选10~80cm 的检测距离,检测距离间隔为10cm。
试验在室内进行,两个电机可以采用两个发光二极管来模拟接受控制信号[7]。漫反射光电开关在设定距离范围内没有检测到障碍物的时候,发光二极管发光;当漫反射光电开关检测到设定距离内出现障碍物时,发光二极管熄灭。实验结果如表2所示。
结果表明,在50cm 的距离范围内漫反射光电测量的误差值小,对除草机器人的避障效果较好。在多次实际的试验中,测试距离会受到障碍物大小的影响而出现偏差,障碍物的大小会影响漫反射光电开关的检测准确度,有时造成误检测而导致系统的不稳定。
4.4 样机测试
经过多次实验,最终选择在平坦的路上和在垄沟中对除草机器人进行测试,在垄沟中的测试路径如图7所示,通过对硬件软件多次调试,以达到预期的目标;但是在机器人避障过程中仍存在着不够稳定的缺点,今后对路径规划算法方面还需要进行进一步地改进和完善。
5 结 语
本文在分析了国内外除草机器人发展和研究现状的基础上,提出了一种基于PLC 控制的除草机器人总体设计方案。该设备的制作已经完成。经过可行性验证,该除草机器人可以提高除草效率,减少人工数量。符合目前农业智能化、高效化方向发展。