基于Geomagic的汽车零件的逆向建模技术及误差检测分析与研究
2020-11-06胡丽华王涛任少蒙
胡丽华 王涛 任少蒙


摘 要:文章以国产小轿车的配件为原型,针对结构造型复杂以及误差检测复杂的问题,利用逆向工程的方法实现快速精度检测与分析。文章通过天远OKIO扫描仪获取零件的点云数据,运用Geomagic Studio逆向建模软件对点云数据实现NURBS曲面重建。最后利用Geomagic Control X检测软件将逆向建模形成的NURBS曲面与原始设计模型进行3D和2D比较,分析偏差来源,从而为实际生产提供技术依据,通过数据得到修模方案,缩短调模周期。
关键词:逆向工程;数据扫描;数据处理;曲面重构;检测分析
中图分类号:TP391.72 文献标志码:A 文章编号:2095-2945(2020)31-0034-02
Abstract: In this paper, with the domestic automobile parts as the prototype, aiming to solve the problems such as complex structure and complex error detection, this paper uses Geomagic Studio reverse engineering to achieve fast precision detection and analysis.In this paper, the point cloud data of the product is obtained through the TIANYUAN OKIO scanner, and Using Geomagic Studio reverse modeling software, this paper realizes the reconstruction of NURBS surface. Finally, using Geomagic Control X detection software, the reverse NURBS surface is compared with the original design model in 3D and 2D, and the deviation source is analyzed, which provides technical basis for actual design improvement, thereby greatly shortens the design cycle.
Keywords: reverse engineering; data scanning; data processing; surface reconstruction; detection analysis
引言
在汽车领域,汽车外形零件具有尺寸大、结构复杂、自由曲面多等特点,在传统的冲压成形后易产生回弹现象以及型面磨损现象,造成实际生产的零件与其设计要求的CAD模型之间有一定的误差,在生产达到一定批量之后会影响零件的成形质量,最终影响汽车的装配性能。随着逆向建模技术的不断发展,人们对汽车的外观和性能要求也越来越严格,使得其在现代汽车设计中的应用也越来越广泛。
1 逆向工程的工作流程
在本次研究中,利用三维扫描技术与逆向工程技术进行融合,实现产品逆向建模,逆向工程的关键技术包括了零件的数据采集和数据处理、最终曲面拟合等过程。拟合完得到的模型保存为IGS格式,可以进行下一步的创新设计或者直接加工等后续工作。本次研究主要是针对零件的检测而做的逆向扫描,所以只需要通过技术手段得到最准确的数据,为后续导入Geomagic Control X软件打下基础。
2 逆向工程的误差来源
逆向工程的误差可以两个部分,偶然误差和系统误差。偶然误差可以人为控制,一般是因为实验中多次不确定性因素而产生的差异,误差随机分布且不能预测,正常情况下通过多次试验可以完全消除;系统误差具有系统性,造成系统误差的因素有仪器误差、装置条件误差、试验方法理论误差和个人误差等,系统误差消除比较困难,一般需要分析每个原理、每台设备、每个步骤才能找到误差的来源。
由于本次主要分析的是制造误差,所以不管是在测量过程中产生误差、数据处理误差还是模型重构产生的误差都应该将误差控制在最小范围内,有利于更加准确地分析零件在制造过程中产生的误差。
3 数据采集
3.1 扫描前处理
本次扫描的是某型号国产汽车的配件,如图1所示,图中圆圈所画的部位是本次精度分析中的关键尺寸,通过调整零件放置的角度和位置,准确得到这几个弯曲部位的点云数据。扫描前将被测物体喷涂白色显像剂和贴标识点,通过对零件的观察与分析,找出可能形成的测量盲区,进行多次扫描,通过调整零件的位置和角度减少盲区。
在进行正式扫描之前需要对扫描仪进行参数设置,调整拍摄距离、调整相机亮度和标定系统等。对扫描仪进行标定时, 先通过调整相机的高度将两个摄像头的焦距重合,然后调整相机亮度,将背景曝光度调整到-2,在转台上贴一个标志点,用于转台标定,准备工作完成后,按照操作步骤对转台进行标定。
3.2 扫描
转台标定完毕之后,将被测零件放置在旋转平台上,在3D-SCAN软件中新建一个拼接测量工程,点击转台测量,将转盘设置为中等速度匀速旋转,转台每转45度相机扫描一次,扫描仪能自动获取零件的点云数据,并在软件主页面同步显示采集到的数据点,最后软件会自动拼接每次扫描的数据,将数据保存备用。
4 点云处理及数模重构
所有的点云信息采集完之后会自动保存在我们的新建工程里,我们运用Geomagic studio軟件对点云数据进行处理。在 Geomagic studio软件导入扫描得到的点云数据,然后对汽车零件的数据进行处理,主要包括: 简化数据、注册合并、清除噪点和填充孔、面片光顺、生成曲面等。点云处理结果如图2所示。
图2 点云处理结果
5 模型对比分析
将原有的CAD模型和拟合好的曲面分别导入Geomagic Control X(原Geomagic qualify)软件中,将原有的CAD模型设置为REF,作为参考对象,将重构好的模型设置为TEST,作为本次的检测对象,在最新版本中软件默认数字模型为参考对象,导入的重构模型为测试对象。下一步应该把两个数据进行对齐,常用的对象对齐方式有初始对齐、最佳拟合对齐、N点对齐等,通过分析本次模型的特征,首先用最佳拟合对齐方式使重构模型和CAD模型的坐标进行对齐,然后采用N点对齐使两个模型贴合,对某些细节部位要求严格的零件单独对齐来减小偏差。
5.1 3D偏差分析
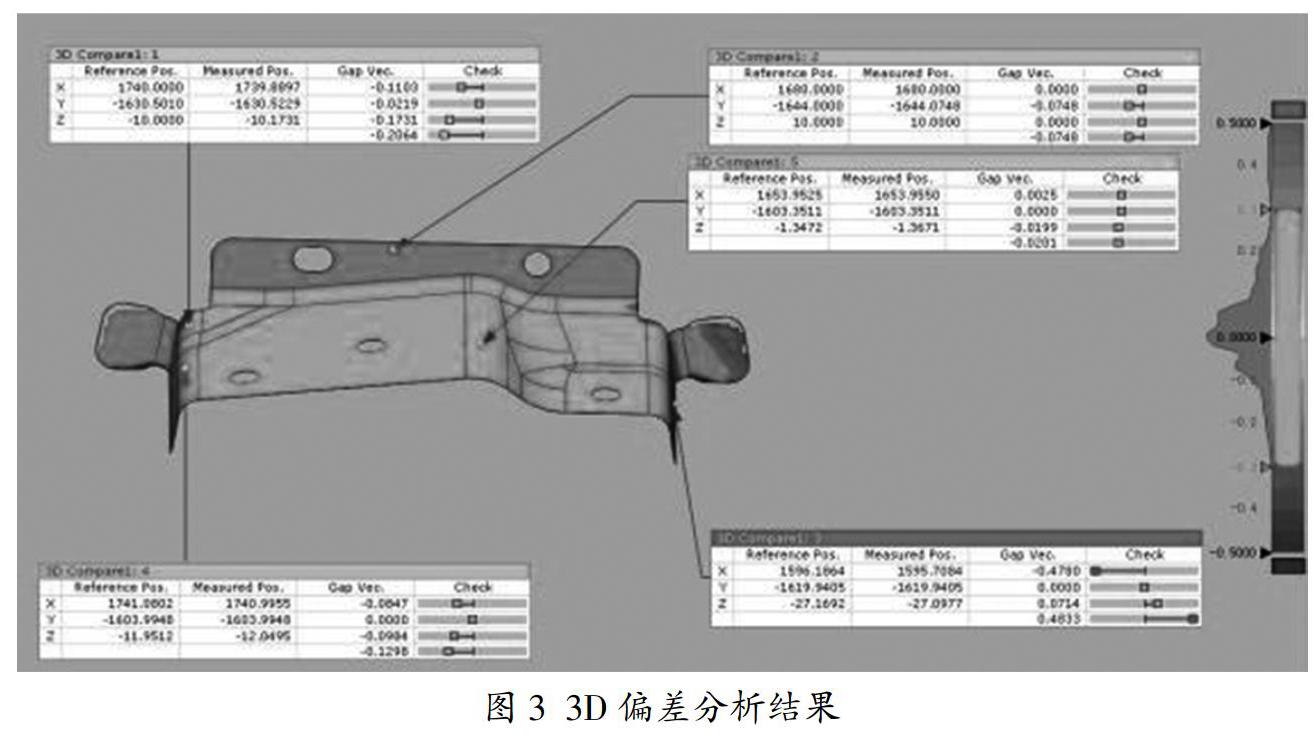
本次研究的模型是一个多角度弯曲的冲压零件,对弯曲圆角部分的尺寸要求比较严格,结合实际生产对弯曲成型后的要求进行零件尺寸的检测,设置最大、最小偏差值(本次测试合格公差设置为±0.3mm),通过3D对比频谱结果分析,可以大致地分析出不合格区域,从而为更精确的2D偏差分析提供参考依据。如图3所示为3D偏差分析结果。
5.2 2D偏差分析
从3D偏差频谱分析结果中,选取几个超差范围比较多的截面单独作2D偏差分析,选取要求比较严格的几个节点进行检测,得出以下结果:所测节点具体的偏差数值,最大的偏差为1.7354,最小的偏差为-0.0241,结合产品的实际用途,偏差在允许范围内。
厂家通过得到的检测报告,找出偏差比较大的区域对模具的凸、凹模或者冲压参数进行调整,从而得到更精确的尺寸。
6 结束语
本文采用先进的三维扫描技术,对模型进行全尺寸测量,再借助于逆向建模软件以及检测软件Geomagic Control X,将这种先进的检测方法应用于检测零件型面的精度和误差,为汽车零部件的冲压回弹数据提供了可靠的依据,同时也为大批量零件质量抽检提供了修模依据。
参考文献:
[1]姜宽舒,刘永华.基于Geomagic Qualify的叶轮逆向工程偏差检测与分析[J].农业装备技术,2016,42(6):35-37.
[2]章云云.基于逆向工程技术的车灯零件重构[J].中国科技信息,2010(19):121-122.
[3]王雅为.基于Geomagic的零件型面精度检测及分析[D].哈尔滨理工大学,2017.
[4]石赞.基于Geomagic Studio的水枪逆向设计及其误差分析[J].南方农机,2019(1):45-47.
[5]蔡敏,成思源,杨雪荣,等.基于Geomagic Studio的特征建模技術研究[J].机床与液压,2014,11(42):142-145.
