CRH5动车组牵引系统的多输出间接矩阵变换器的控制研究
2020-11-06王闪闪陈然
王闪闪 陈然
摘 要:针对CRH5动车组牵引系统AC-DC-AC变换器体积大,功率因数低、能量非双向流动等问题,文章引入多输出间接矩阵变换器(indirect matrix converter,IMC),并采用模型预测控制(model predictive control,MPC)方法实现多异步电机(induction motor,IM)控制。基于构建的CRH5动车组IMC-双IM牵引系统,建立电机定子磁链和转矩预测模型,根据输出调速性能和电网需求建立目标函数并寻优以实现动车组的高性能牵引。仿真表明在MPC方法控制下CRH5动车组牵引系统输入侧无功功率约为0,输出侧两台IM可以高性能独立调速运行。
关键词:CHR5动车组牵引系统;多输出间接矩阵变换器;模型预测控制方法
中图分类号:U266 文献标志码:A 文章编号:2095-2945(2020)31-0009-03
Abstract: Aiming at the problems of large size, low power factor and non-bi-directional energy flow of AC-DC-AC converter in traction system of CRH5 EMU, multi-output indirect matrix converter (IMC) is introduced in this paper, and model predictive control (MPC) method is adopted to realize multi-induction motor (IM) control. Based on the IMC-double IM traction system of CRH5 EMU, the prediction model of motor stator flux and torque is established. According to the output speed regulation performance and power grid requirements, the objective function is established and optimized to achieve high performance traction of EMU. The simulation results show that under the control of MPC method, the reactive power on the input side of the traction system of CRH5 EMU is about 0, and the two IM on the output side can run independently with high performance.
Keywords: CHR5 EMU traction system; multi-output indirect matrix converter; model predictive control method
引言
在高速鐵路、航天航空、钢铁等众多工业领域中,往往需求多台电机协同带载工作[1-3]。例如构造速度为250km/h的CRH5高速铁路动车组牵引系统,主要采用4个AC-DC-AC的间接变换器驱动10台电机协同运行,传统变换器中间直流环节一般设置大电容元件进行储能,大重量,大体积,短寿命。这阻碍了高速动车组9项关键技术中车体轻量化、系统集成化、牵引变流器等技术革新[2]。文献[1,3]在航天及工业中提出多输出IMC新型拓扑驱动多台电机,实现了体积减小、功率因数提高及能量双向流动,故IMC驱动多台电机在铁路领域也可论证。
针对CRH5动车组IMC-双IM牵引系统的控制,文献[3]采用间接的空间矢量脉冲宽度调制(SVPWM)与矢量控制结合,取得了良好控制效果。但该方法控制思想繁杂,需同时调节大量参数。对此本文把MPC思想[4]引入系统,对模型精度要求不高、结构简单、参数易调节且实现高质量控制。具体的,建立电机电磁转矩和定子磁链、输入无功预测模型,并建立目标函数寻优,使得目标模型跟随基准值。最后通过大量仿真验证了理论的正确性。
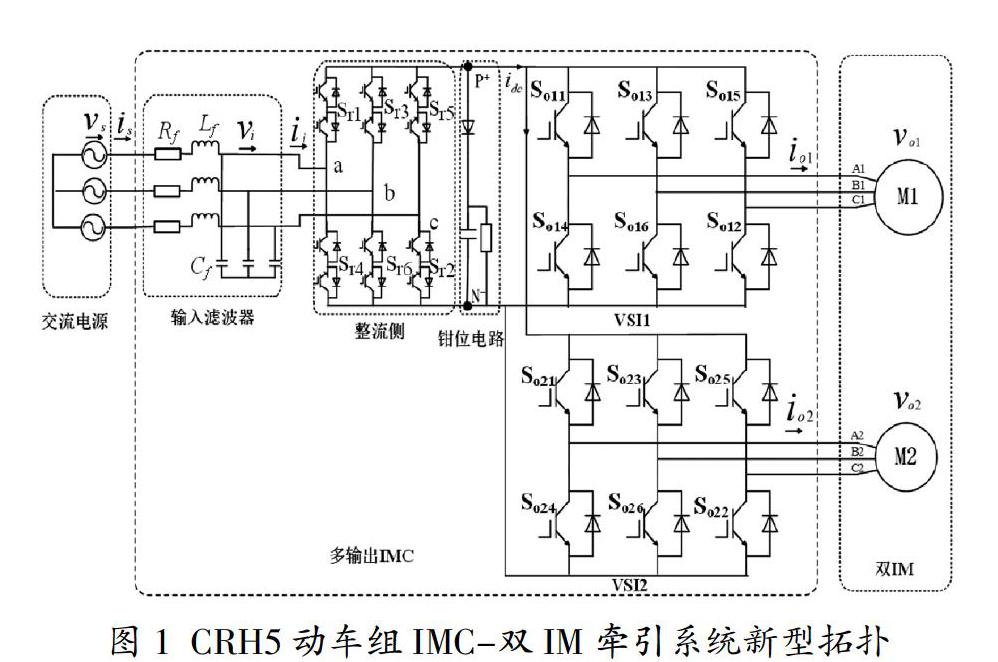
1 CRH5动车组IMC-双IM牵引系统新拓扑
如图1构建了一种新型三相输入的动车组IMC-双IM牵引系统。主要包括三相正弦交流电源、多输出IMC、两台IM。IMC包含输入滤波环节,虚拟整流环节、钳位保护、VSI。其中虚拟整流环节由六个可实现能量双向流动的双向开关组成[3,5]。
2 MPC方法
模型预测控制思想是20世纪60年代初期发展起来现代控制理论,对模型精度要求不高,且能实现高质量控制:首先建立控制目标的预测模型,然后建立品质函数,最后在有限状态机进行预测并寻最优预测状态控制系统[4]。借鉴这一思想,CRH5动车组牵引系统的MPC控制结构如图2,主要包括三部分:电机定转子磁链观测、预测模型及目标函数最优化。
2.1 定转子磁链观测
由IM定子电压方程和转子磁链公式[5],对得定转子磁链观测模型如下离散公式:
2.2磁链与转矩预测模型
同上步观测推导,推得定子磁链预测模型如下:
而根据电磁转矩公式,建立预测模型为:
从式(4)中发现,要建立转矩预测模型要先建立定子电流预测模型,由定子动态方程推得定子电流预测模型如下:
上式中各参数含义如文献[5]。
由输入滤波器数学模型得网侧电流is预测模型[5]:
(6)
以上预测模型对两台IM均适用。考虑到网测电压基本恒定,网侧无功功率预测模型可由式(6)得:
2.3 目标函数最优化
建立目标函数如(8),选择使其值最小的开关状态为下一时刻最优开关状态。其中λ1-λ5为各变量权重。
(8)
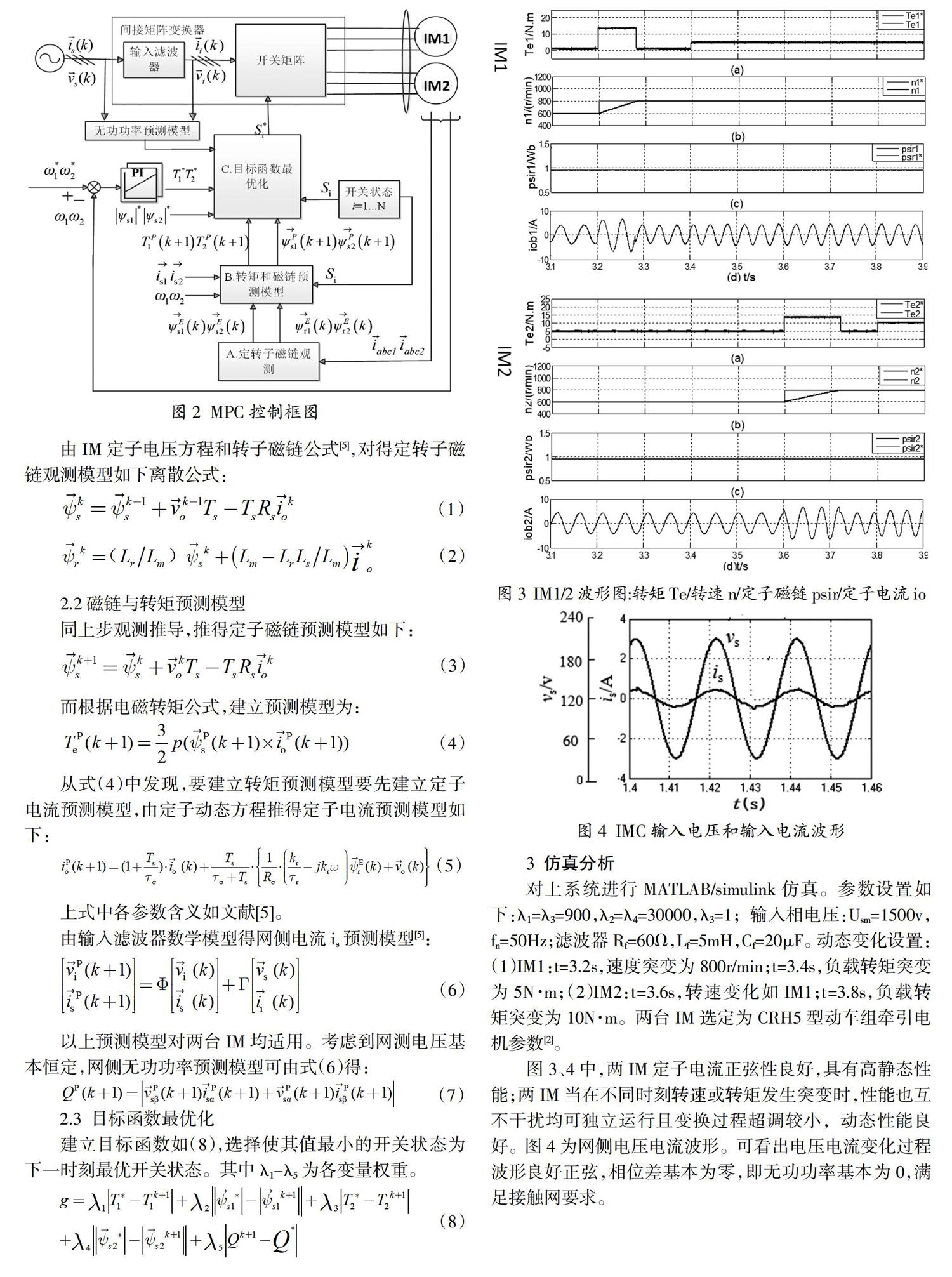
3 仿真分析
对上系统进行MATLAB/simulink仿真。参数设置如下:λ1=λ3=900,λ2=λ4=30000,λ3=1;输入相电压:Usm=1500v,fn=50Hz;滤波器Rf=60Ω,Lf=5mH,Cf=20μF。动态变化设置:(1)IM1:t=3.2s,速度突变为800r/min;t=3.4s,负载转矩突变为5N·m;(2)IM2:t=3.6s,转速变化如IM1;t=3.8s,负载转矩突变为10N·m。两台IM选定为CRH5型动车组牵引电机参数[2]。
图3、4中,两IM定子电流正弦性良好,具有高静态性能;两IM当在不同时刻转速或转矩发生突变时,性能也互不干扰均可独立运行且变换过程超调较小,动态性能良好。图4为网侧电压电流波形。可看出电压电流变化过程波形良好正弦,相位差基本为零,即无功功率基本为0,满足接触网要求。
4 结论
本文实现了新型CRH5动车组IMC-双IM牵引系统的MPC控制。仿真结果证明:此拓扑在实现降重增功及能量双向流动的同时,输出侧双IM可以独立高性能调速控制,输入侧实现单位功率因数。随着开关器件开关时间及损耗减低、功率的提升等发展,实现三相输入的IMC在大功率高速动车组多机牵引系统的样机试验指日可待。
参考文献:
[1]孙凯,周大宁,梅杨.矩阵式变换器技术及其应用[M].北京:机械工业出版社,2007:1-3.
[2]邹档兵.CRH系列动车组牵引变流器主电路分析[J].铁道机车车辆,2017,37(02):42-46.
[3]T.D.Nguyen,H.H.Lee. Dual Three-Phase Indirect Matrix Converter With Carrier-Based PWM Method. IEEE Transactions on Power Electronics, 2014,29(2):569-581.
[4]J.Rodriguez, M. P.Kazmierkowski, et al. State of the Art of Finite Control Set Model Predictive Control in Power Electronics. IEEE Transactions on Industrial Informatics, 2013,9(2):1003-1016.
[5]王閃闪.间接矩阵变换器-异步电机调速系统的零电流换流模型预测控制方法[J].科技创新与应用,2019(30):141-142+144.
