全站式扫描仪在大面积甲板平整度变形监测中的应用
2020-11-06刘序辰史艳龙
张 威, 刘序辰, 史艳龙
(上海船舶工艺研究所, 上海 200032)
0 引 言
对于船体大面积、大跨度的通体结构水平甲板而言,其反顶结构支撑因舱内空间需求往往设计较少,易产生结构变形。因此,在其结构贯通后,需对该甲板进行平整度变形监测,以便矫正形变,使其满足设计和功能要求。同时甲板结构面在建造过程中还存在多项交叉作业会影响平整度的状态,因此需对甲板在建造过程中与矫正过程中进行变形监测,及时掌握变形情况,提高精度品质与生产效率。
大范围的结构平整度变形监测无论是对建造还是对管理而言,都具有较大的挑战。总装成形后的甲板平整度变形管理主要存在下列几个困难点。一是平整度变形监测的效率问题:测量的范围广、数据量大。二是平整度变形监测的手段需满足大跨度甲板精度要求:显然传统的拉线法已无法适应,需借助光学测量设备实现,且对设备的测量范围及测量精度均有较高要求。三是所选平整度变形监测的设备需适应工况环境:现场为户外施工环境,且该环境下存在甲板振动,因此所选设备需具备水平自动补偿功能,否则无法满足测量所需。解决问题的关键在于如何快速、精确、全面地对整个甲板实现多频次平整度测量,从而保障生产有序推进,强化甲板水平管理能力,促进建造品质提升。
1 全站式扫描仪
全站式扫描仪是近几年发展起来的新型测量设备,该设备突破传统的单点测量模式,使测量工作更加高效与便捷,为空间三维数据的获取提供了一个全新的测量手段。该设备采用非接触式激光测量技术,以点云的形式采集并保存被测物体表面的三维坐标信息和纹理数据[1]。
全站式扫描仪主要包括测距系统和扫描系统,同时也集成数字摄像和仪器内部校正等系统。其中,测距原理与全站仪一致,其扫描工作原理是:以望远镜结构中的距离测量模块和角度测量模块作为获取数据的硬件基础,配合电机驱动实现扫描。全站式扫描仪获取点云的方式属于线扫描模式,即选定扫描区域后,仪器在起始位置首先驱动望远镜上下快速转动,按照设定的采样间隔取得垂直方向上的目标点云坐标,然后水平转动一定间隔,再从上至下采集点云数据,并储存记录。设备扫描获取点云采用的是空间球坐标测量原理,设全站式扫描仪对空间点的水平角、天顶距和斜距测量值分别为Hz、V、S,空间扫描点的三维坐标(x、y、z)[2]为
(1)
在甲板平整度变形监测应用过程中,全站式扫描仪作业涉及多步骤操作,按数据采集与数据分析进行主体划分。采集阶段为现场作业环境,主要硬件包括全站式扫描仪、设站棱镜组和PC端。现场测量结束后通过PC端进行数据分析,分析环节共分为导入点云、处理噪点、建立平面、标注误差、输出报告等5个步骤,如图 1所示。

图1 全站式扫描仪平整度变形监测步骤
2 数据采集
全站式扫描仪分别选取3处船体大面积甲板的局部区域进行现场平整度变形数据采集。其中:甲板1数据采集用时约15 min,采集点云数约17 000个;甲板2数据采集用时约20 min,采集点云数约23 000个;甲板3数据采集用时约30 min,采集点云数约34 000个。3次采集过程中均要求尽可能选择振动较小的位置架设设备,并对设备进行整平并打开水平补偿,水平补偿范围±0.25°,该范围内的水平偏离会自动校正。创建测量作业后,对所需采集的区域平整度进行范围界定,明确扫描范围;界定完成后设置所需被测点的点云间隔密度,密度的设定将决定被测点的数量及测量时间;完成上述步骤后设备开始自动扫描进行数据采集,其间无需人为干预。考虑到测量工况的复杂性,作业中会遇到所需扫描位置有遮挡,因此需结合设备自身的设站功能并辅以设站棱镜组的架设进行统一坐标系建立,有利于提升采集数据的整体性。
需要特别说明的是,范围界定和数据采集需结合设备系统误差进行综合考虑,使之达到最佳测量精度状态。系统误差的大小是由扫描仪自身条件决定的,如激光的发散度决定扫描仪的有效测程,随着距离增加,激光发散度不断增加,采集的点云数据精度也随之降低[3]。应用于大面积甲板平整度变形监测,一般要求100 m范围内达到1 mm精度。以MS60为例,其扫描300 m范围内测量精度可达1 mm,满足应用要求。数据采集中减小误差的方法:一是增加扫描仪的测站点、减小扫描距离,从而降低激光的发散度;二是可减小激光光束方向与物体表面切平面法线的角度。
3 数据分析
数据分析全过程在PC端进行,将全站式扫描仪采集的数据通过Polyworks等主流软件完成整个后期处理步骤。
3.1 分析环节
(1) 导入点云。将全站式扫描仪所采集的甲板平整度点云数据导入分析软件,初步观察所采集点云数据的完整性。
(2) 处理噪点。扫描区域将存在大量噪点及多余被测点,如甲板上摆放的设备及工具等,需要逐个进行剔除,仅保留待分析的甲板点云数据。
(3) 建立平面。平整度变形监测主要是测量实测面与理论面的法向或垂直偏差,因此,对处理后的点云数据需进行理论平面建立,并拟合出最佳平面的平整度数据。
(4) 标注误差。为了使平整度变形趋势观察更直观,所有数据以色温图方式呈现,同时对需要量化误差的点可以进行单独标识。
(5) 输出报告。可生成电子或纸质变形监测分析结果报告提供给现场,用于指导现场进行平整度变形校正。
3.2 实测结果
依照第3.1节的步骤可获取最终3组甲板平整度数据,并以点云图形式呈现,所监测范围内的平整度变形位置与变形量一目了然。
甲板1区域内大部分点处于-15~10 mm之间,局部存在超标现象,最高点出现在艏部靠近舯部(33 mm),最低点出现在甲板中心靠右舷区域(约-32 mm),如图2所示。
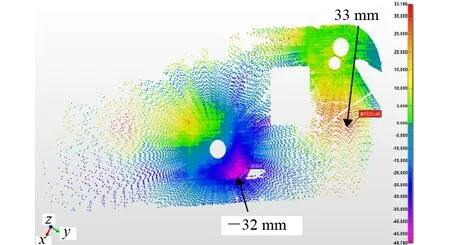
图2 甲板1的实测点云平整度色温图
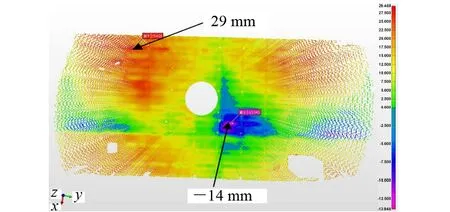
图3 甲板2的实测点云平整度色温图
甲板2区域平整度变形大部分处于0~15 mm范围内,局部存在变形较大现象,其中最高点出现在被测区域向艉部边缘位置(29 mm),最低点出现在被测区域中线位置(-14 mm),如图3所示。 甲板3区域平整度变形偏差结果,最高点16 mm出现在甲板面靠近左舷开口处,最低点-23 mm 出现在右侧开口处,如图4所示。

图4 甲板3的实测点云平整度色温图
4 与传统变形监测设备对比
传统的变形监测手段主要通过全站仪或水准仪等光学测量设备采集各个被测点的空间三维坐标,取高度坐标值判断每个目标点之间的高差,得出被测物平整度精度状态,从而判断是否满足设计标准等要求。这种方法的测量点是逐个采取的,工作量大,且后期数据处理繁琐,效率低。因此,为了实现监测目标,需应用更高效精准的全站式扫描仪对大面积甲板平整度变形进行监测。为验证所述合理性,选择3种设备进行横向对比,具体对比情况如表 1 所示。

表1 3种监测设备指标对比
对比后可发现,3台具有水平补偿功能的监测设备在测量精度与测量范围方面均可满足大面积甲板的平整度变形监测。在实测效率统计的环节中,现场工况非一览无余,需避开障碍物进行多次设站,在效率影响性方面3台监测设备基本是相同的。因为全站式扫描仪是自动扫描并形成点云的数据形式,所以被测点的采集效率及可测量性远大于需人工采点的水准仪和全站仪。人工投入方面,水准仪和全站仪在测量过程中需2人协同完成,而全站式扫描仪为自动测量,无需人为干预。传统变形监测方法在操作难易程度、测量范围、工作量、自动化程度、数据形式的客观性方面各有欠缺。相比之下,全站式扫描仪的应用解决了传统变形监测方法在平整度管理上的所有测量难题。
5 结 论
根据应用情况,抛开监测设备市场价值,在大面积甲板的平整度变形监测应用上,全站式扫描仪完全适应甲板建造工况:有效测量作业半径大,有效测量距离可达300 m;测量精度高,测量范围内精度可达1 mm,满足应用要求;测量效率高,短时间内可扫描上万个点云数据;劳动成本低,1人即可完成测量作业。
同时,在测量期间被测点的点云密度可按需自由设定,且数据呈现形式直观,最大程度满足大面积甲板对平整度变形监测管理上的所有需求。
